
一种基于组合惯导信息应用的光电转塔视频跟踪前馈补偿方法.pdf

猫巷****提格


1/7
2/7

3/7

4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于组合惯导信息应用的光电转塔视频跟踪前馈补偿方法.pdf
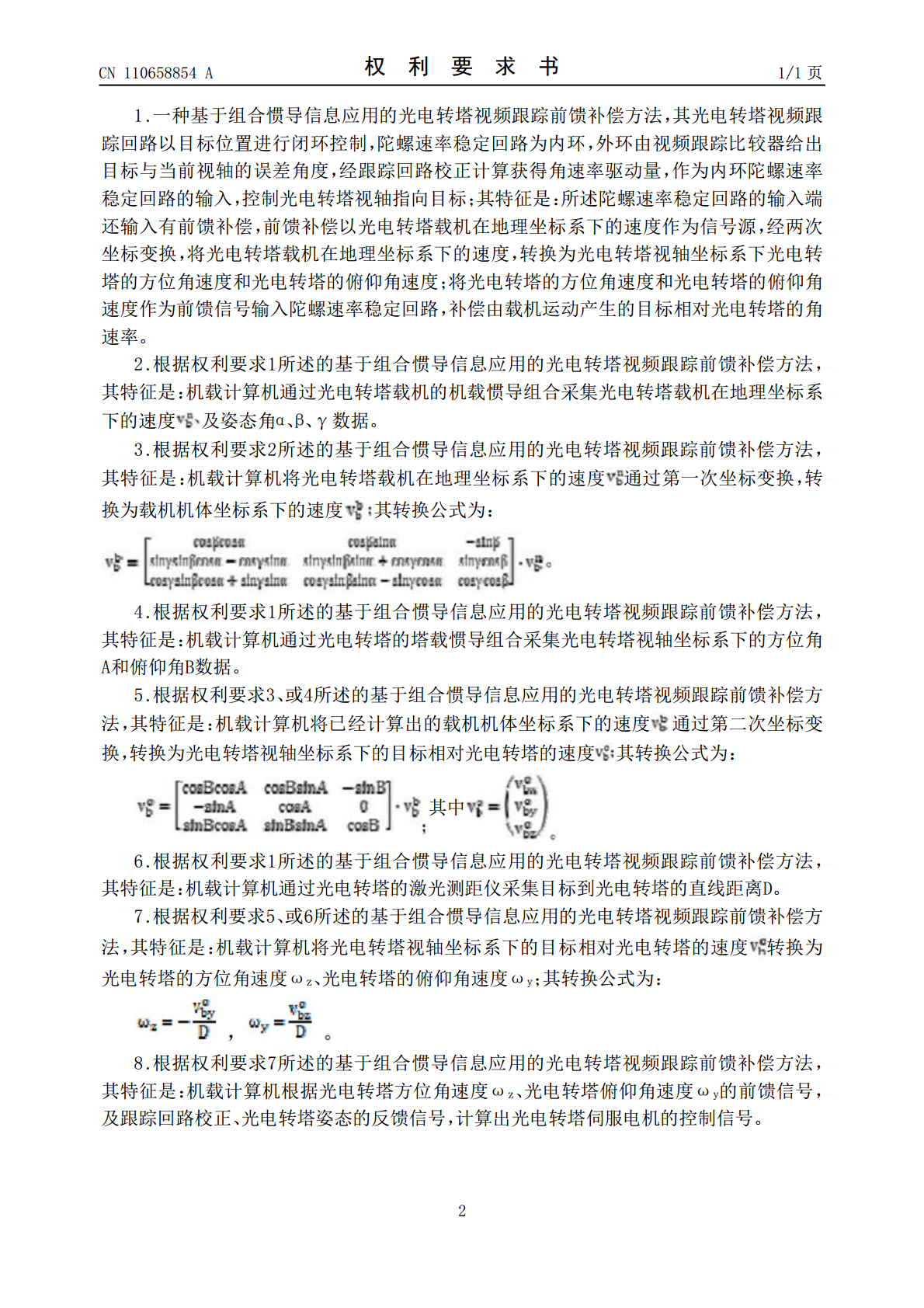
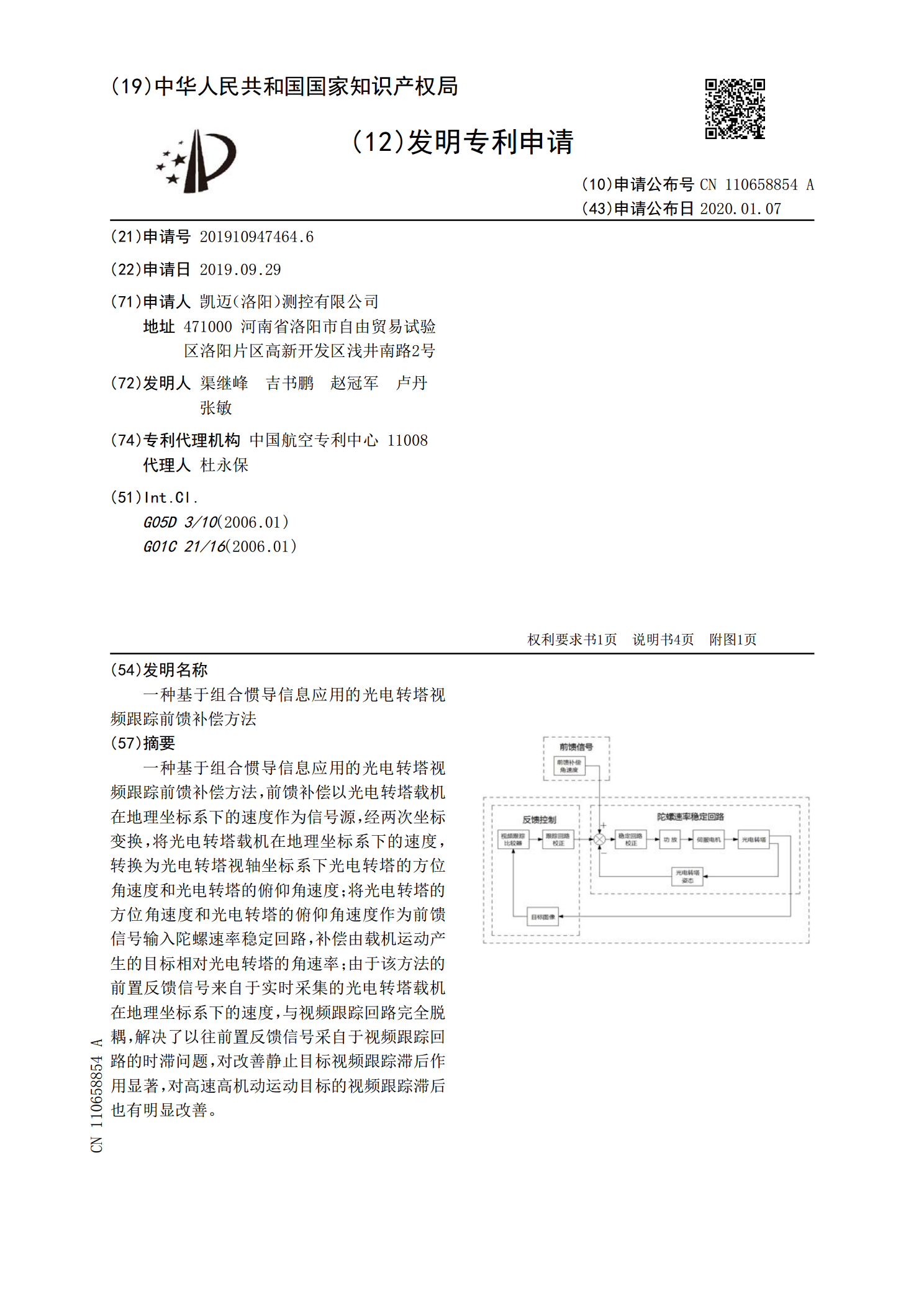
一种基于组合惯导信息应用的光电转塔视频跟踪前馈补偿方法,前馈补偿以光电转塔载机在地理坐标系下的速度作为信号源,经两次坐标变换,将光电转塔载机在地理坐标系下的速度,转换为光电转塔视轴坐标系下光电转塔的方位角速度和光电转塔的俯仰角速度;将光电转塔的方位角速度和光电转塔的俯仰角速度作为前馈信号输入陀螺速率稳定回路,补偿由载机运动产生的目标相对光电转塔的角速率;由于该方法的前置反馈信号来自于实时采集的光电转塔载机在地理坐标系下的速度,与视频跟踪回路完全脱耦,解决了以往前置反馈信号采自于视频跟踪回路的时滞问题,对改

一种基于组合惯导信息和光电转塔视频跟踪的运动目标测速测向方法.pdf
一种基于组合惯导信息和光电转塔视频跟踪的运动目标测速测向方法,在目标测速测向过程中,光电转塔的视轴始终指向目标,同时光电转塔的激光测距仪持续测量目标到载机的直线距离;机载计算机同步实时采集在地理坐标系下载机的北向速度

基于前馈补偿的并联型光电设备稳定平台伺服控制.docx
基于前馈补偿的并联型光电设备稳定平台伺服控制摘要:随着光电设备的广泛应用,对其稳定性和精度要求也越来越高。而伺服控制系统在光电设备中起到至关重要的作用,可以提高设备的运动性能和稳定性。本论文针对并联型光电设备的稳定平台,通过前馈补偿的方法,设计了一种改进的伺服控制算法,以提高系统的动态响应和抗干扰能力。实验结果表明,该算法能够有效地提高系统的稳定性和精度。关键词:光电设备;并联型;稳定平台;伺服控制;前馈补偿1.引言随着科技的不断进步,光电设备在各个领域得到了广泛的应用,如摄像机、光学仪器等。然而,光电设

基于前馈补偿PID控制的轮式机器人轨迹跟踪.docx
基于前馈补偿PID控制的轮式机器人轨迹跟踪基于前馈补偿PID控制的轮式机器人轨迹跟踪摘要:随着自动化技术的不断发展,轮式机器人在物流、农业和工业等领域得到了广泛的应用。轮式机器人的轨迹跟踪控制是其核心技术之一,对于实现精确的路径规划和目标追踪至关重要。然而,传统的PID控制器在轨迹跟踪中存在精度不高、响应时间长等问题。因此,本文提出了一种基于前馈补偿PID控制的轮式机器人轨迹跟踪方法,通过引入前馈补偿项,提高系统的响应速度和精度。实验证明,该控制方法可以有效地实现轮式机器人的轨迹跟踪。关键词:轮式机器人,

基于简约学习前馈补偿的永磁直线同步电机跟踪控制.docx
基于简约学习前馈补偿的永磁直线同步电机跟踪控制永磁直线同步电机(PermanentMagnetLinearSynchronousMotor,简称PMLSM)具有高效、无噪、小体积、高精度、高速定位控制等优点,在工业生产和民用领域中得到了广泛应用。然而,由于永磁直线同步电机存在不可逆性、非线性、死区等问题,造成了跟踪控制难度大、系统性能下降等问题,因此,如何提高永磁直线同步电机的跟踪控制精度,一直是研究者们关注的热点。基于简约学习前馈补偿的永磁直线同步电机跟踪控制方法,是一种常见的控制方法。简约学习控制方法