
一种履带式机器人.pdf

安双****文章

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种履带式机器人.pdf
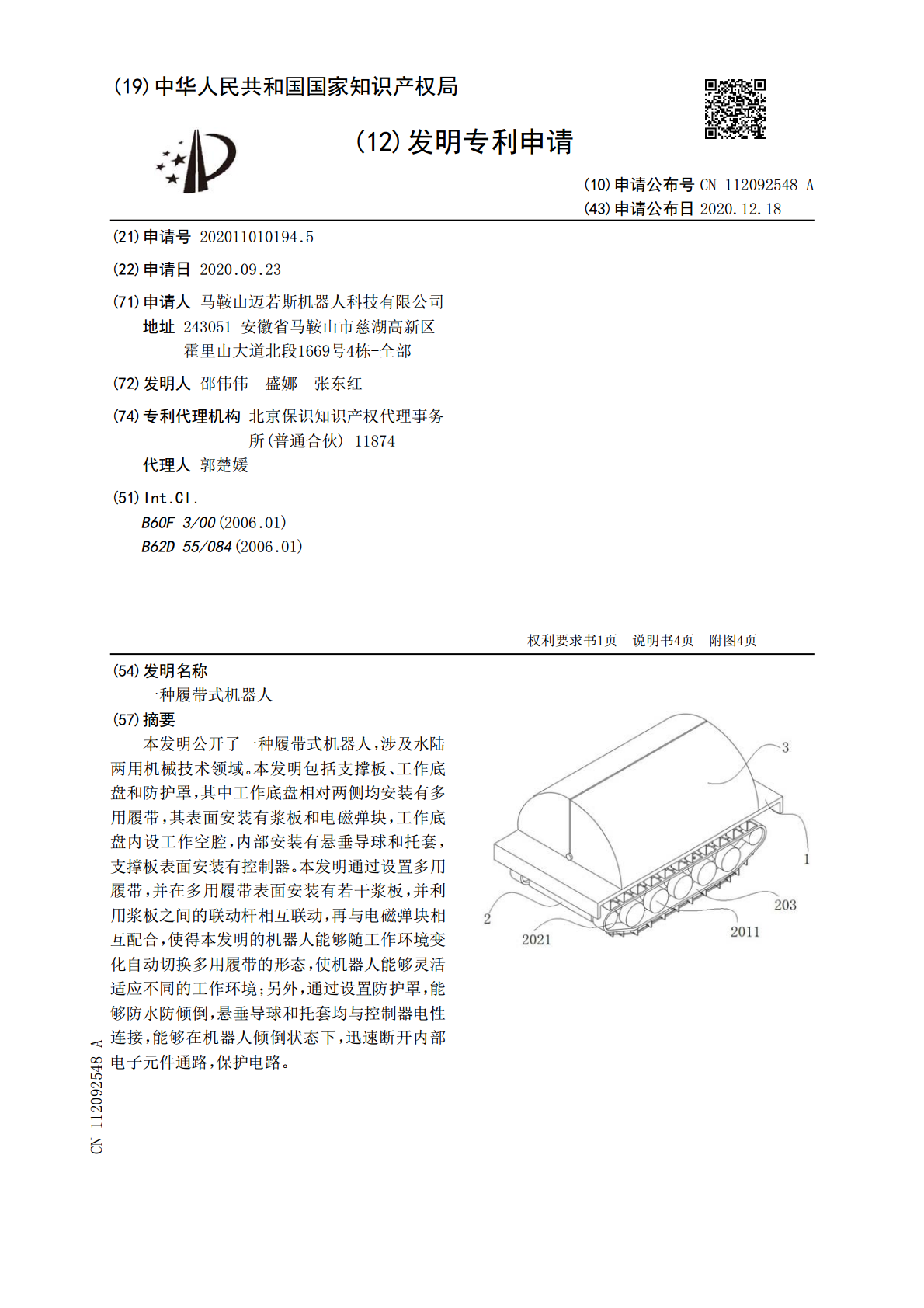
本发明公开了一种履带式机器人,涉及水陆两用机械技术领域。本发明包括支撑板、工作底盘和防护罩,其中工作底盘相对两侧均安装有多用履带,其表面安装有浆板和电磁弹块,工作底盘内设工作空腔,内部安装有悬垂导球和托套,支撑板表面安装有控制器。本发明通过设置多用履带,并在多用履带表面安装有若干浆板,并利用浆板之间的联动杆相互联动,再与电磁弹块相互配合,使得本发明的机器人能够随工作环境变化自动切换多用履带的形态,使机器人能够灵活适应不同的工作环境;另外,通过设置防护罩,能够防水防倾倒,悬垂导球和托套均与控制器电性连接,能
一种履带式机器人.pdf
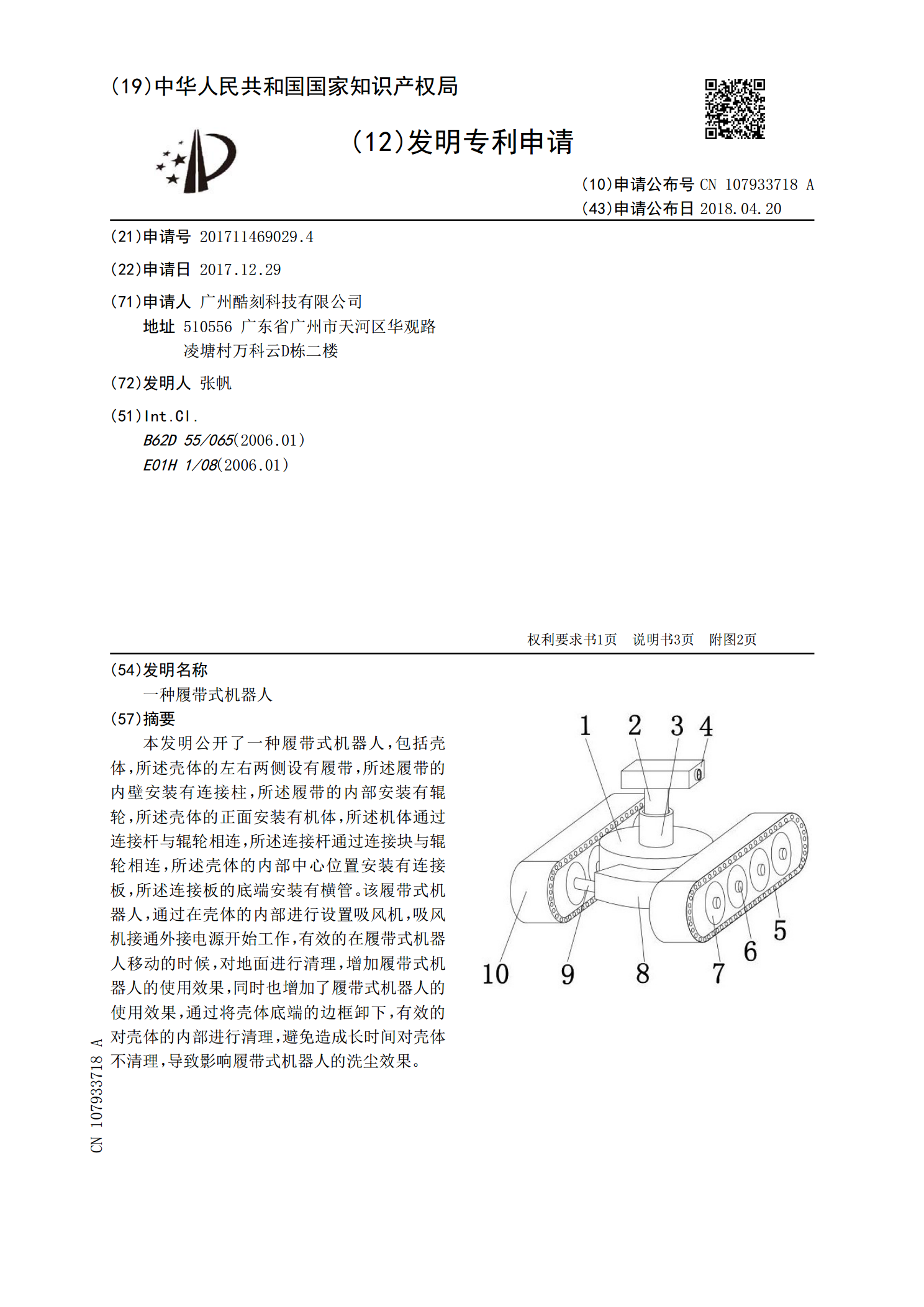
本发明公开了一种履带式机器人,包括壳体,所述壳体的左右两侧设有履带,所述履带的内壁安装有连接柱,所述履带的内部安装有辊轮,所述壳体的正面安装有机体,所述机体通过连接杆与辊轮相连,所述连接杆通过连接块与辊轮相连,所述壳体的内部中心位置安装有连接板,所述连接板的底端安装有横管。该履带式机器人,通过在壳体的内部进行设置吸风机,吸风机接通外接电源开始工作,有效的在履带式机器人移动的时候,对地面进行清理,增加履带式机器人的使用效果,同时也增加了履带式机器人的使用效果,通过将壳体底端的边框卸下,有效的对壳体的内部进行

一种履带式修剪机器人.pdf
本发明公开了一种履带式修剪机器人,该修剪机器人设有主臂架和副臂架两套伸缩式变幅臂架,大大提升了修剪机器人的作业半径,以增强作业能力;同时,该修剪机器人还配置有四组折叠式液压支腿,各组折叠式液压支腿均能快速进行收放,以进一步提升臂架变幅的稳定性,使得由主臂架和副臂架等组成的臂架系统,能够达到更大的工作半径的姿态要求;另外,本发明通过伸缩式变幅结构的副臂架,能够实现修剪机构的修剪角度的快速微调,大大提升了修剪作业的效率,同时保证了修剪效果。本发明机器人能够很好的满足具有弧面造型的立体化大型植物集群中不同造型、

一种履带式搬运机器人.pdf
本发明公开了一种履带式搬运机器人,包括越障式履带底盘、设置于越障式履带底盘上的伸缩升降装置和设置于伸缩升降装置上的搬运爪;越障式履带底盘包括车架、分设于车架两侧的两个履带装置和设置于车架上用于驱动履带装置运转的驱动系统;履带装置包括行走履带机构和设置于行走履带机构前后两侧的两越障履带机构;驱动系统包括用于驱动行走履带轮转动的行走驱动机构和用于驱动越障履带机构的履带安装架整体转动的越障驱动机构;本机器人同时具备履带式机器人的行进效率和腿式机器人的越障能力;同时,本搬运机器人的搬运爪设置在伸缩升降装置上,进而
一种履带式攀爬机器人.pdf
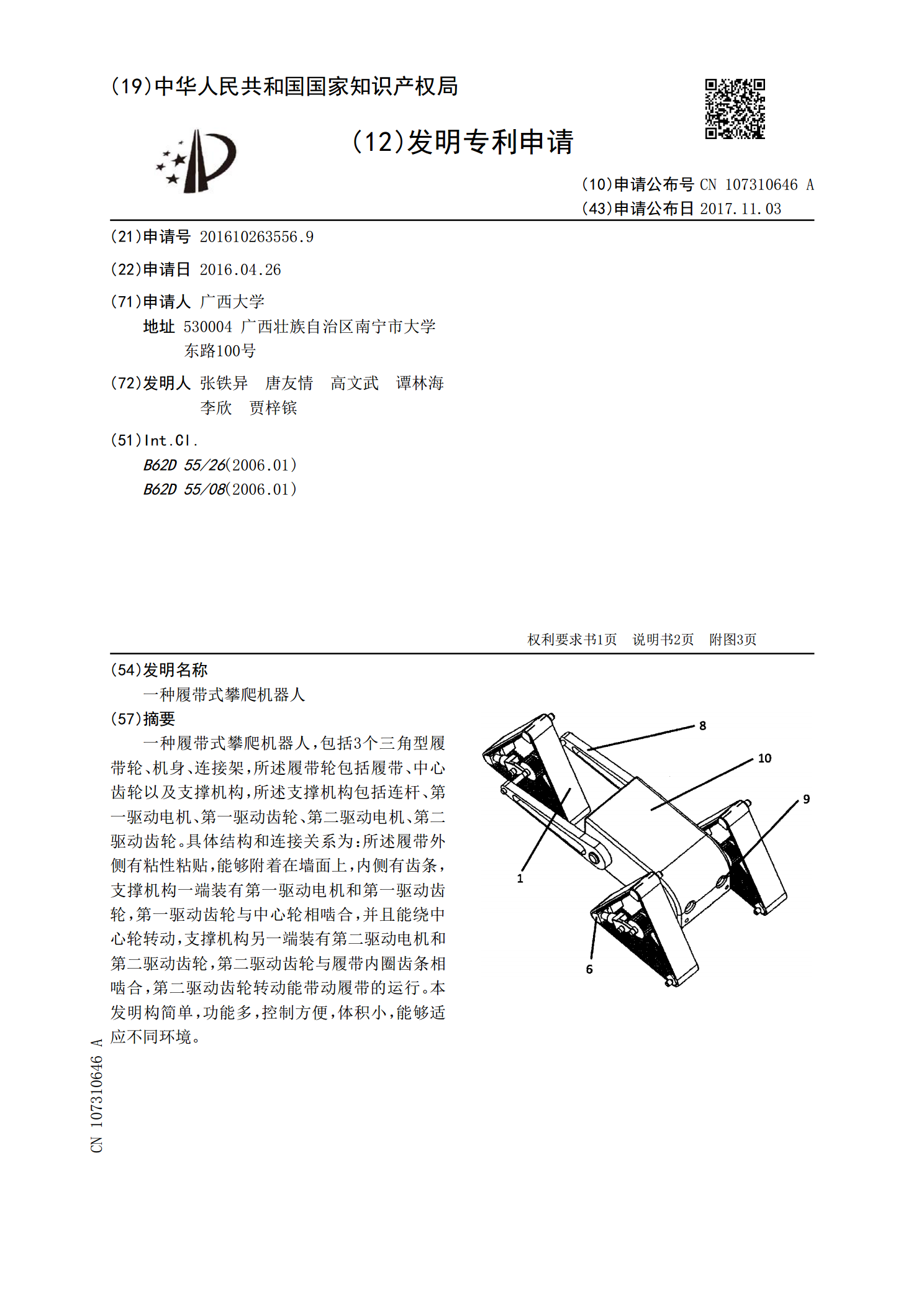
一种履带式攀爬机器人,包括3个三角型履带轮、机身、连接架,所述履带轮包括履带、中心齿轮以及支撑机构,所述支撑机构包括连杆、第一驱动电机、第一驱动齿轮、第二驱动电机、第二驱动齿轮。具体结构和连接关系为:所述履带外侧有粘性粘贴,能够附着在墙面上,内侧有齿条,支撑机构一端装有第一驱动电机和第一驱动齿轮,第一驱动齿轮与中心轮相啮合,并且能绕中心轮转动,支撑机构另一端装有第二驱动电机和第二驱动齿轮,第二驱动齿轮与履带内圈齿条相啮合,第二驱动齿轮转动能带动履带的运行。本发明构简单,功能多,控制方便,体积小,能够适应不