
一种自动充电方法、装置及系统.pdf

永香****能手

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动充电方法、装置及系统.pdf
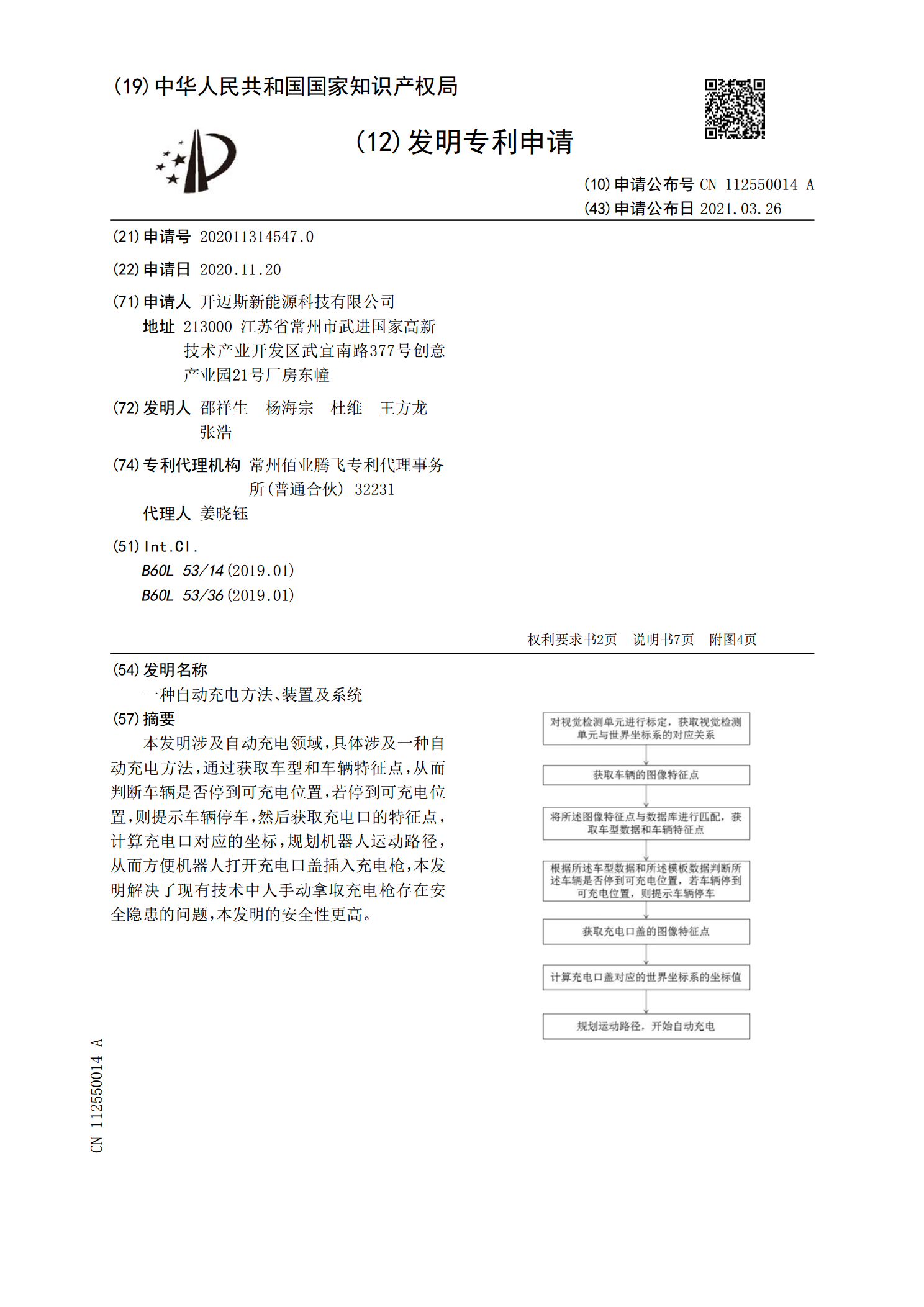
本发明涉及自动充电领域,具体涉及一种自动充电方法,通过获取车型和车辆特征点,从而判断车辆是否停到可充电位置,若停到可充电位置,则提示车辆停车,然后获取充电口的特征点,计算充电口对应的坐标,规划机器人运动路径,从而方便机器人打开充电口盖插入充电枪,本发明解决了现有技术中人手动拿取充电枪存在安全隐患的问题,本发明的安全性更高。
一种自动无线充电装置及充电方法.pdf
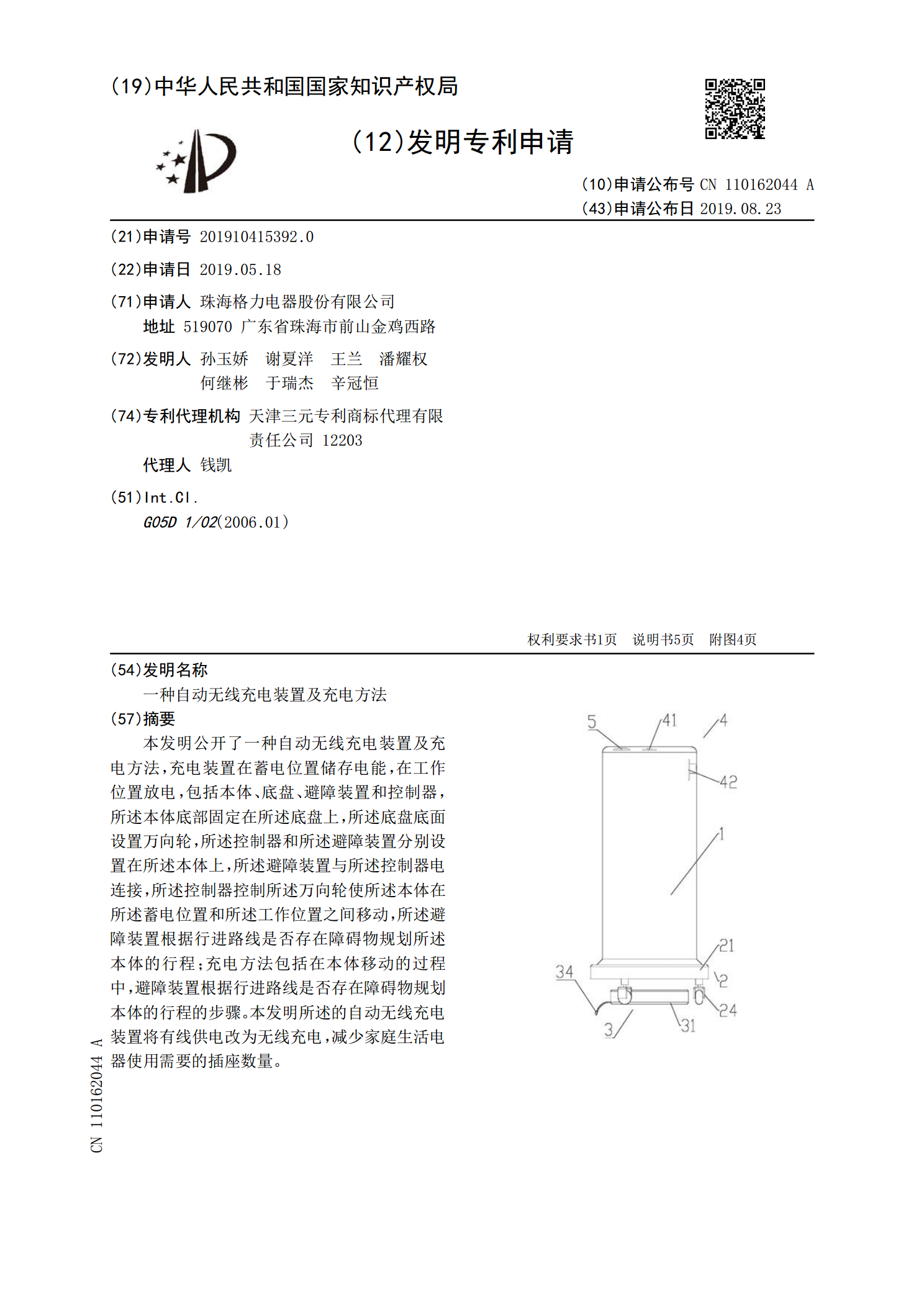
本发明公开了一种自动无线充电装置及充电方法,充电装置在蓄电位置储存电能,在工作位置放电,包括本体、底盘、避障装置和控制器,所述本体底部固定在所述底盘上,所述底盘底面设置万向轮,所述控制器和所述避障装置分别设置在所述本体上,所述避障装置与所述控制器电连接,所述控制器控制所述万向轮使所述本体在所述蓄电位置和所述工作位置之间移动,所述避障装置根据行进路线是否存在障碍物规划所述本体的行程;充电方法包括在本体移动的过程中,避障装置根据行进路线是否存在障碍物规划本体的行程的步骤。本发明所述的自动无线充电装置将有线供电
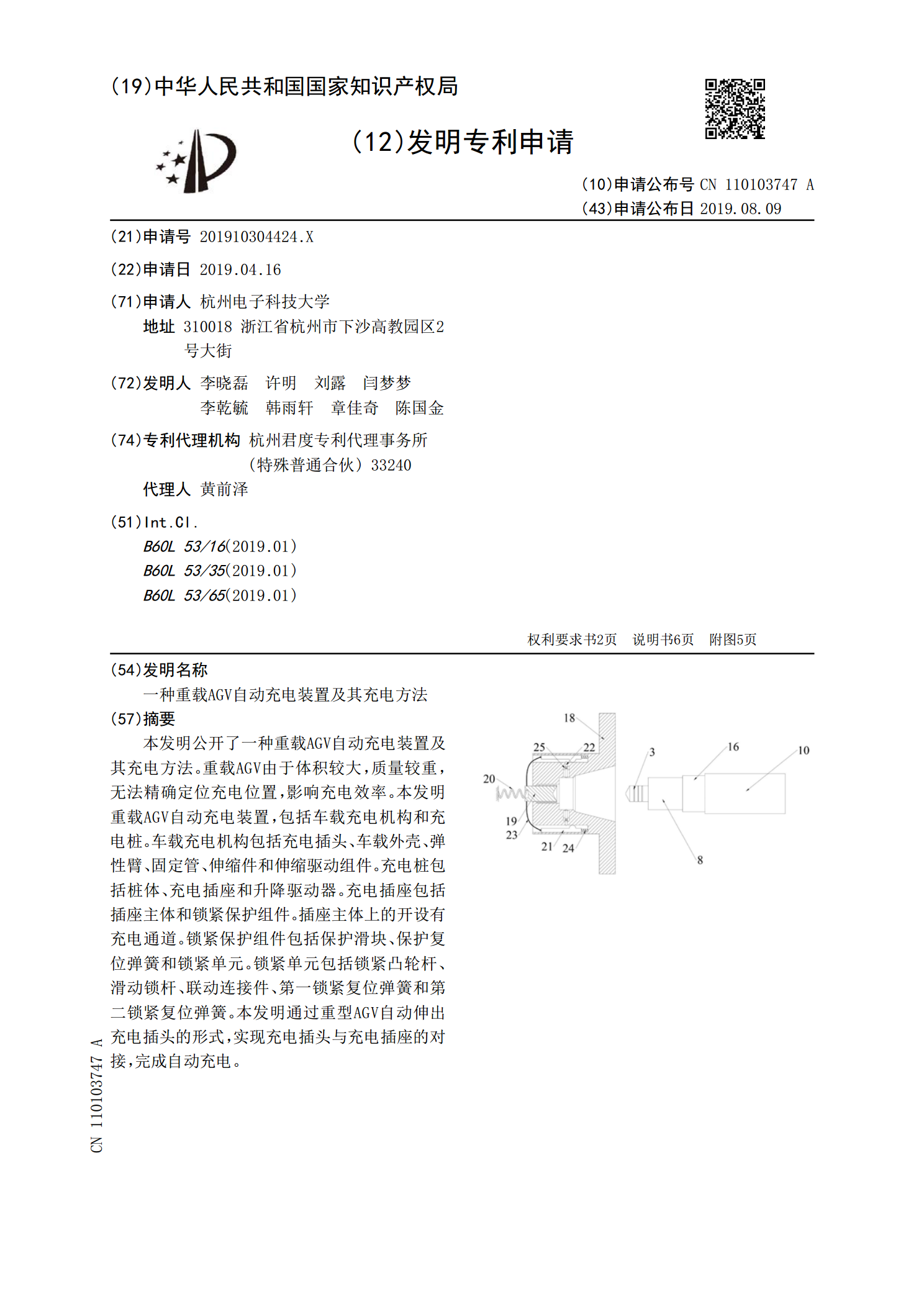
一种重载AGV自动充电装置及其充电方法.pdf
本发明公开了一种重载AGV自动充电装置及其充电方法。重载AGV由于体积较大,质量较重,无法精确定位充电位置,影响充电效率。本发明重载AGV自动充电装置,包括车载充电机构和充电桩。车载充电机构包括充电插头、车载外壳、弹性臂、固定管、伸缩件和伸缩驱动组件。充电桩包括桩体、充电插座和升降驱动器。充电插座包括插座主体和锁紧保护组件。插座主体上的开设有充电通道。锁紧保护组件包括保护滑块、保护复位弹簧和锁紧单元。锁紧单元包括锁紧凸轮杆、滑动锁杆、联动连接件、第一锁紧复位弹簧和第二锁紧复位弹簧。本发明通过重型AGV自动

一种新能源车自动充电方法和自动充电系统.pdf
本申请公开一种新能源车自动充电方法和自动充电系统,其中所述自动充电方法包括基于用户请求,在用户选定的第一目标点位的预定辐射区域范围显示至少一处第一停车区,作为待充电停放区;基于用户请求,在用户选定的第二目标点位的预定辐射区域范围显示至少一处第二停车区,作为充满电待取区;基于所述第一停车区和所述第二停车区的位置信息,确定至少一第三停车区,作为充电区;以及自动转移或搬运停放在所述第一停车区的新能源车至所述第三停车区,进行自动充电,并在充满电后或基于用户请求,自动转移或搬运所述第三停车区的新能源车至所述第二停车
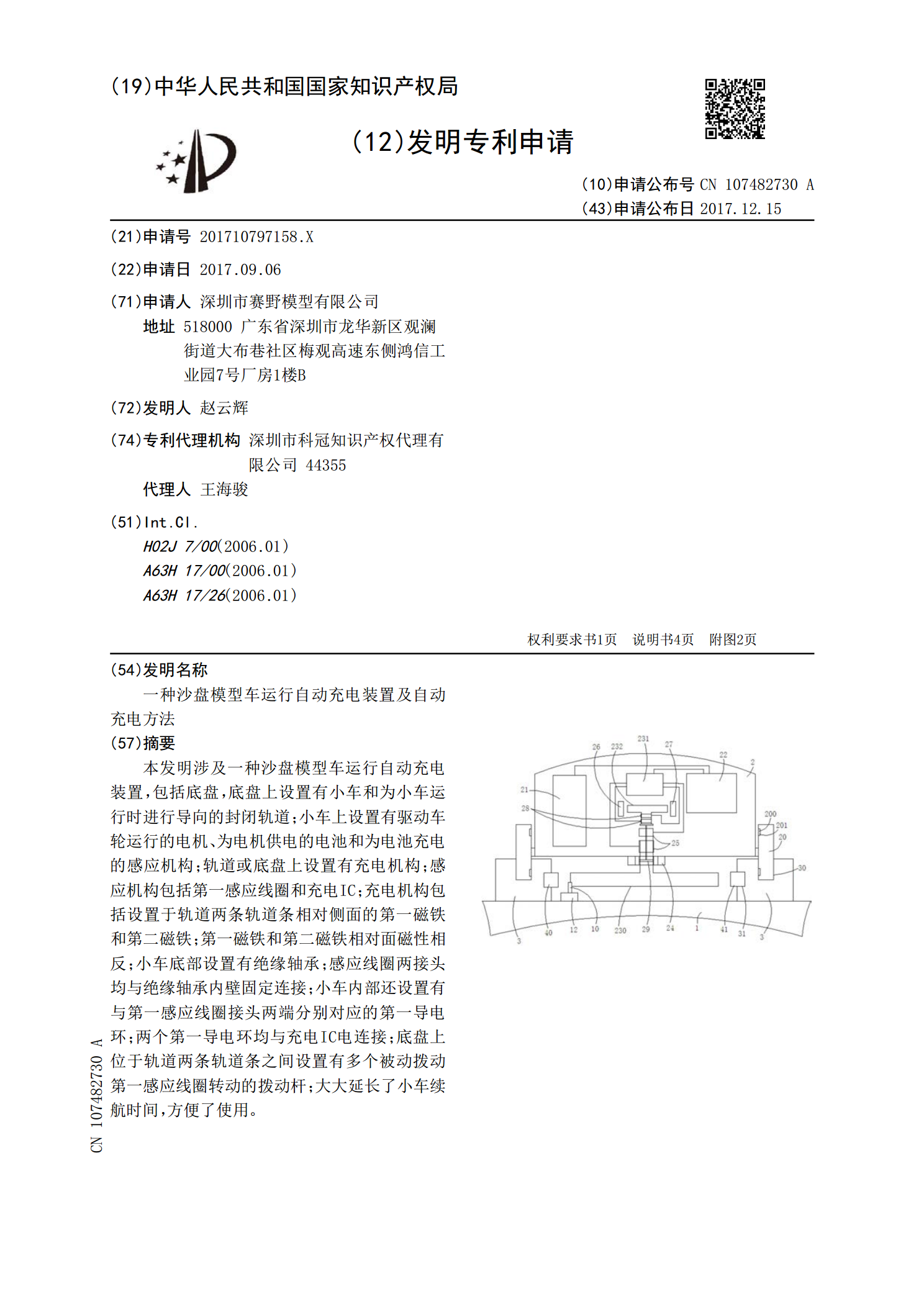
一种沙盘模型车运行自动充电装置及自动充电方法.pdf
本发明涉及一种沙盘模型车运行自动充电装置,包括底盘,底盘上设置有小车和为小车运行时进行导向的封闭轨道;小车上设置有驱动车轮运行的电机、为电机供电的电池和为电池充电的感应机构;轨道或底盘上设置有充电机构;感应机构包括第一感应线圈和充电IC;充电机构包括设置于轨道两条轨道条相对侧面的第一磁铁和第二磁铁;第一磁铁和第二磁铁相对面磁性相反;小车底部设置有绝缘轴承;感应线圈两接头均与绝缘轴承内壁固定连接;小车内部还设置有与第一感应线圈接头两端分别对应的第一导电环;两个第一导电环均与充电IC电连接;底盘上位于轨道两条