
机器人迈步控制方法、装置、机器人控制设备及存储介质.pdf

论文****可爱

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人迈步控制方法、装置、机器人控制设备及存储介质.pdf
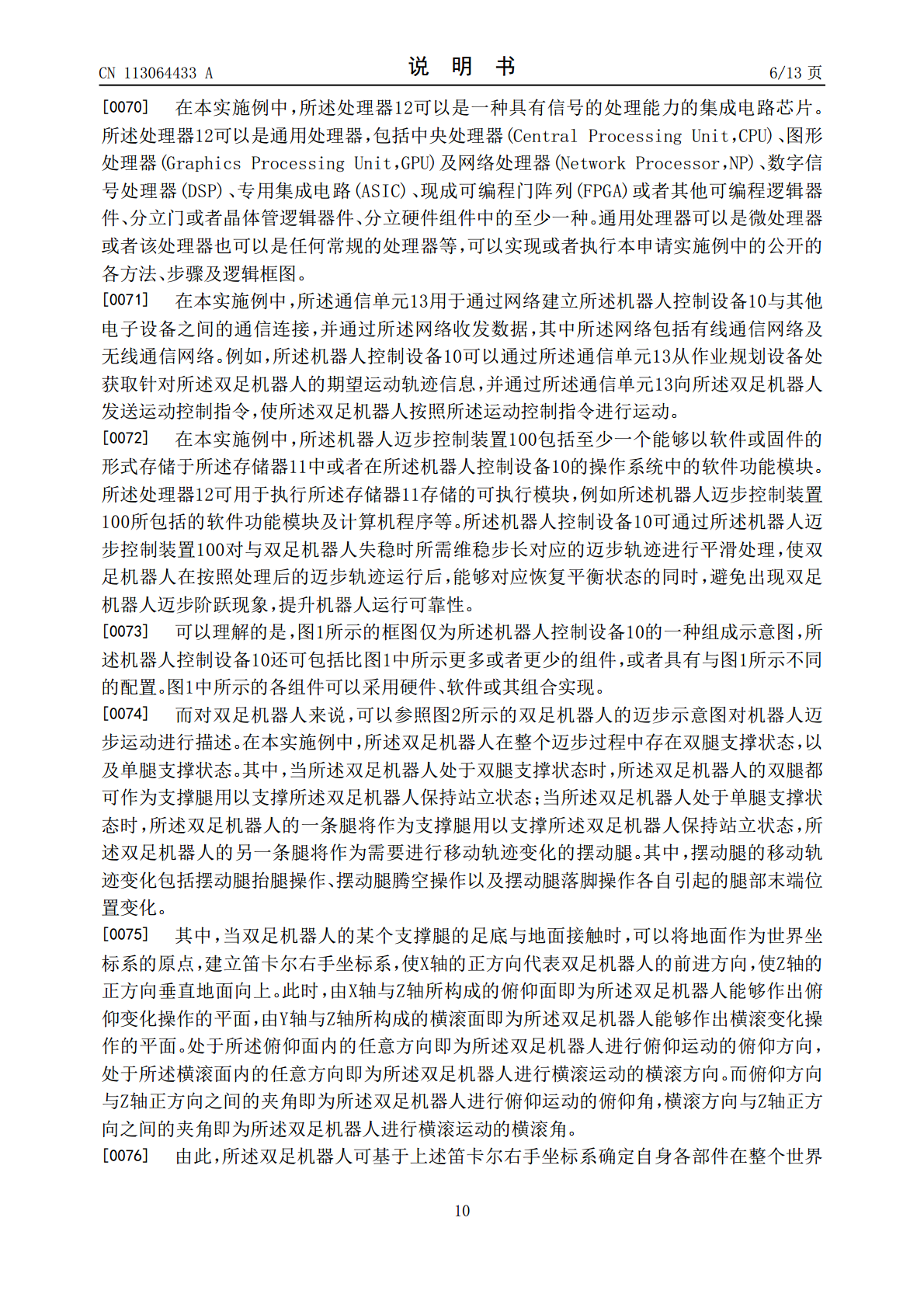
本申请提供一种机器人迈步控制方法、装置、机器人控制设备及存储介质,涉及机器人控制技术领域。本申请在检测到双足机器人当前处于非平衡状态的情况下,会相应地获取双足机器人当前的机体平衡预测步长,并根据所述双足机器人当前移动步长对所述机体平衡预测步长进行平滑过渡处理,得到与所述机体平衡预测步长对应的平衡期望步长,继而得到与平衡期望步长对应的腿部规划轨迹,最后控制双足机器人当前的摆动腿按照腿部规划轨迹进行运动,从而使双足机器人能够恢复到平衡状态,并避免出现机器人迈步阶跃现象,提升机器人运行可靠性。
机器人迈步控制方法及装置、机器人控制设备和存储介质.pdf
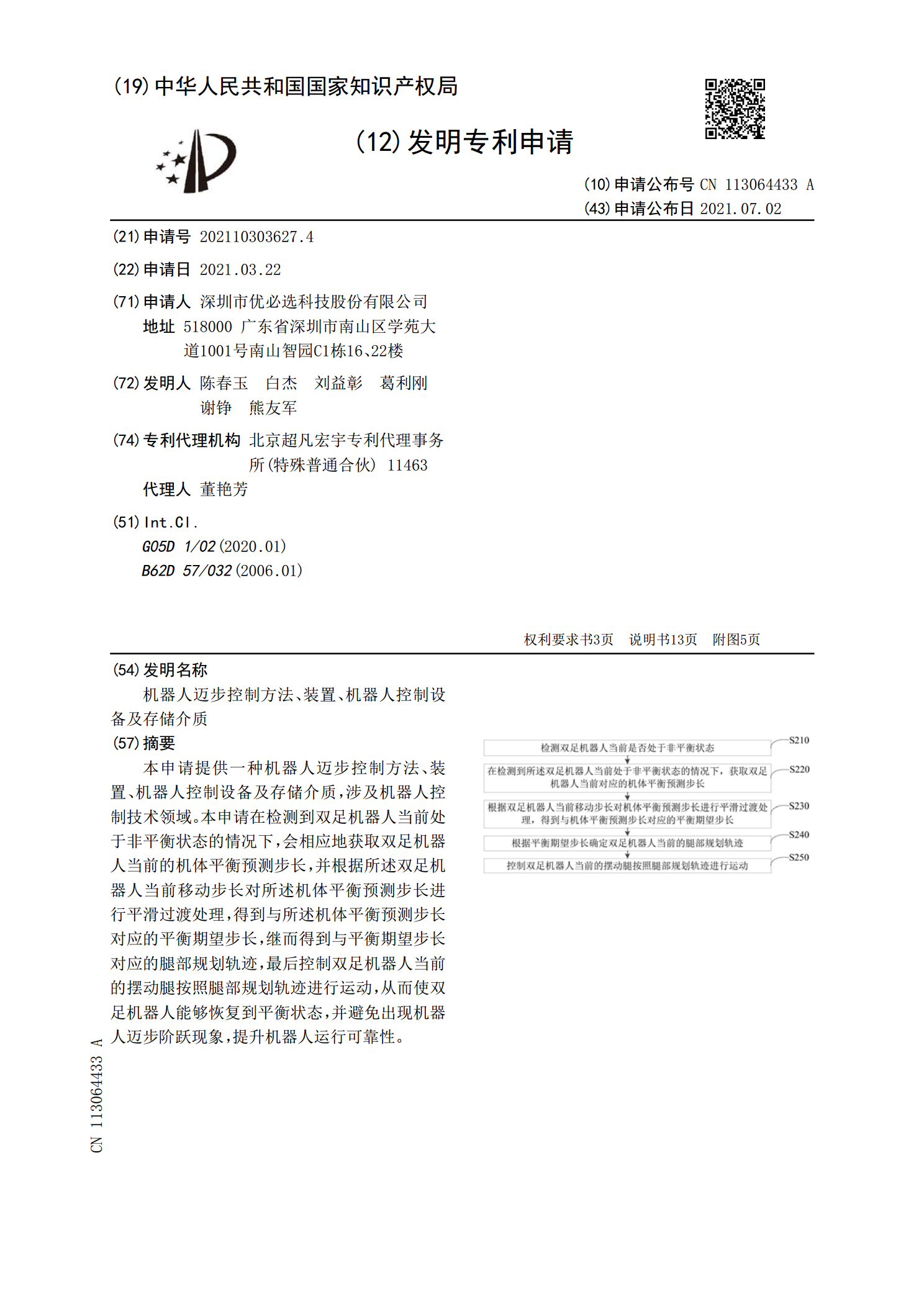
本申请提供一种机器人迈步控制方法及装置、机器人控制设备和存储介质,涉及机器人控制技术领域。本申请根据双足机器人当前的零力矩点规划数据以及双足实际位置数据,确定双足期望支撑力,而后根据双足期望支撑力和当前的质心移动规划数据、质心实际移动数据、双足迈步规划数据及双足实际受力数据,基于柔顺控制算法确定双足踝关节当前的期望关节姿态角,以及与实际足部支撑状态匹配的期望关节位置,从而得以根据双足机器人的实际运动状况对足部期望位姿状况进行全方位柔顺控制,使足部期望位置和足部期望姿态均与实际地面状况实质匹配,以降低单足支
机器人的控制方法、装置、设备及存储介质.pdf
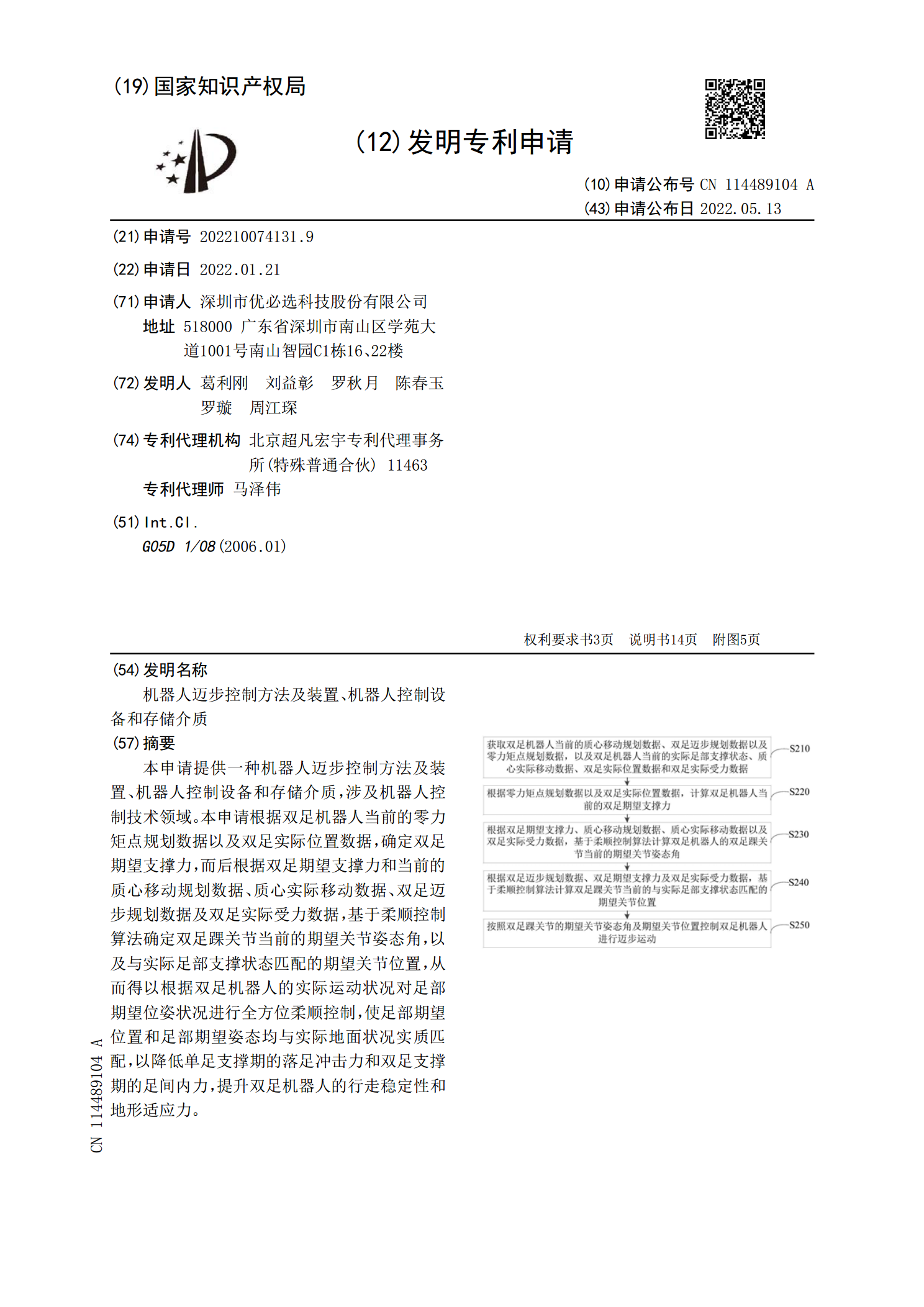
本公开实施例提供了一种机器人的控制方法、装置、设备及存储介质。该方法包括获取机器人采集的图像信息及所述机器人的行驶方向;对所述图像信息处理,获得障碍物类别和所述机器人所在的环境路况;根据所述障碍物类别、所述机器人所在的环境路况以及所述机器人的行驶方向控制所述机器人行驶。本公开实施例,通过根据所述障碍物类别、所述机器人所在的环境路况以及所述机器人的行驶方向控制所述机器人行驶的方式,不仅可以提高机器人送餐或送货的安全性,还可以提高机器人的配送效率,提高用户满意度。
机器人控制方法、装置、设备及存储介质.pdf
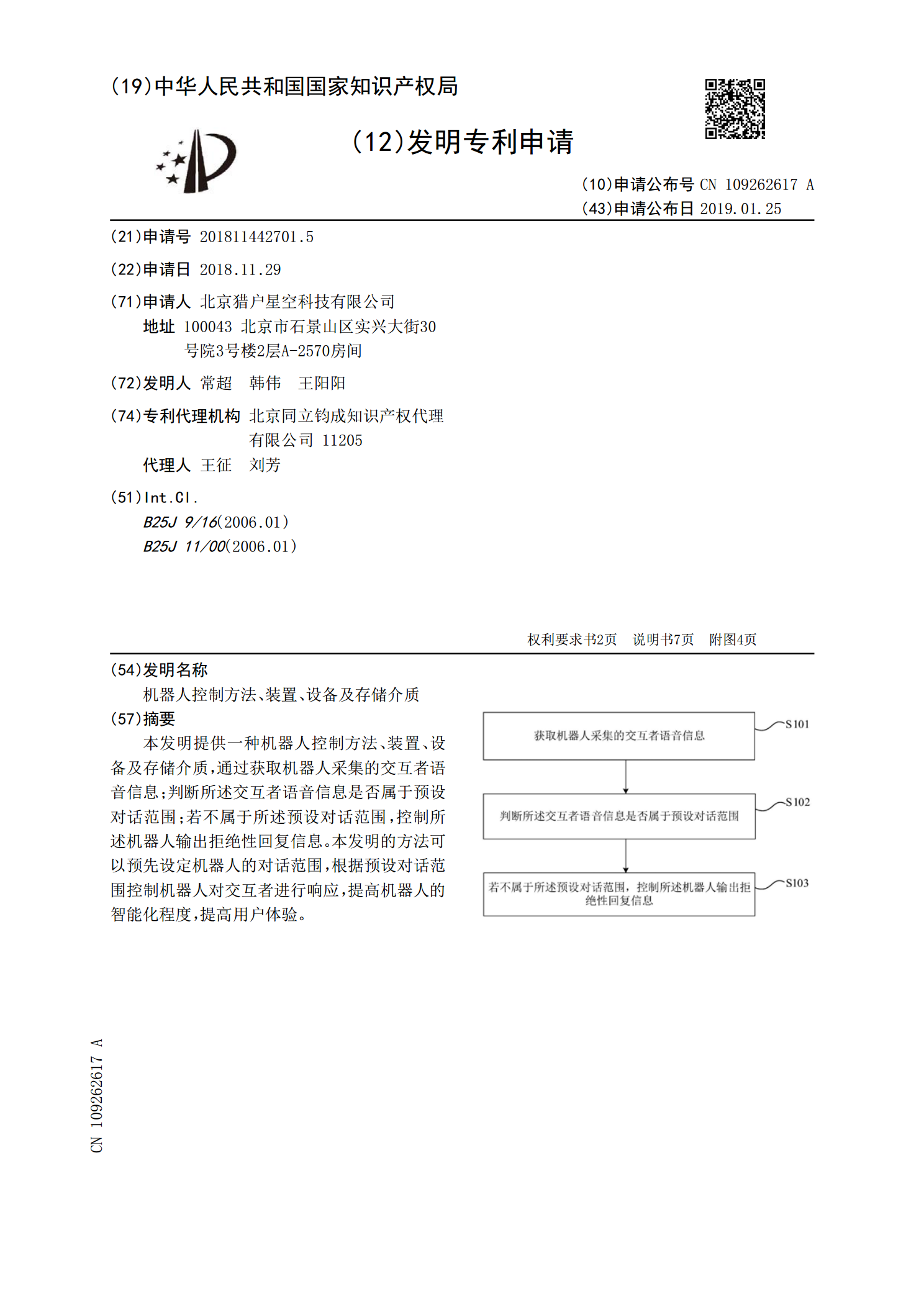
本发明提供一种机器人控制方法、装置、设备及存储介质,通过获取机器人采集的交互者语音信息;判断所述交互者语音信息是否属于预设对话范围;若不属于所述预设对话范围,控制所述机器人输出拒绝性回复信息。本发明的方法可以预先设定机器人的对话范围,根据预设对话范围控制机器人对交互者进行响应,提高机器人的智能化程度,提高用户体验。
机器人的控制方法、装置、设备及存储介质.pdf
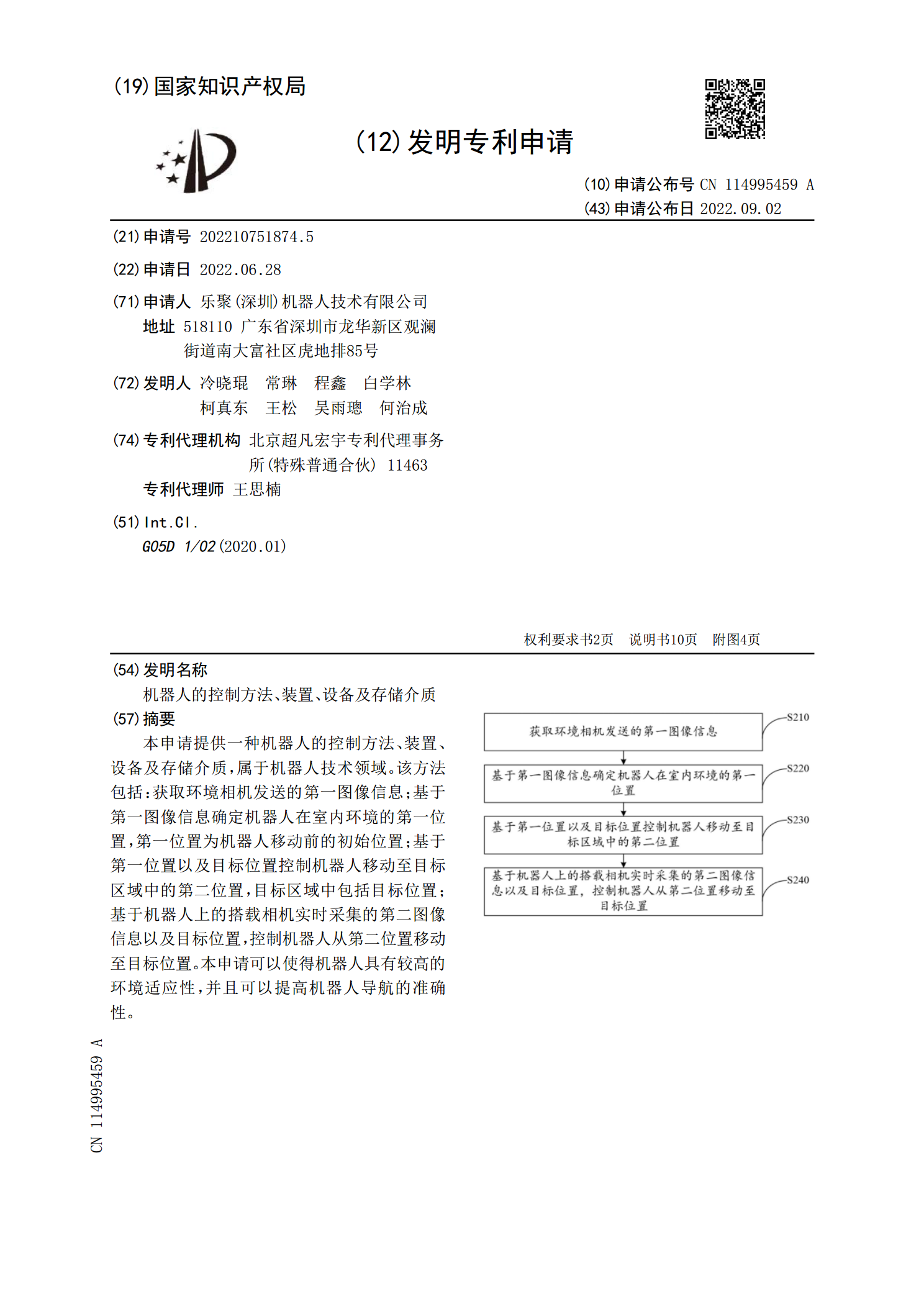
本申请提供一种机器人的控制方法、装置、设备及存储介质,属于机器人技术领域。该方法包括:获取环境相机发送的第一图像信息;基于第一图像信息确定机器人在室内环境的第一位置,第一位置为机器人移动前的初始位置;基于第一位置以及目标位置控制机器人移动至目标区域中的第二位置,目标区域中包括目标位置;基于机器人上的搭载相机实时采集的第二图像信息以及目标位置,控制机器人从第二位置移动至目标位置。本申请可以使得机器人具有较高的环境适应性,并且可以提高机器人导航的准确性。