
腰部助力外骨骼及其控制方法.pdf

是你****噩呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

腰部助力外骨骼及其控制方法.pdf
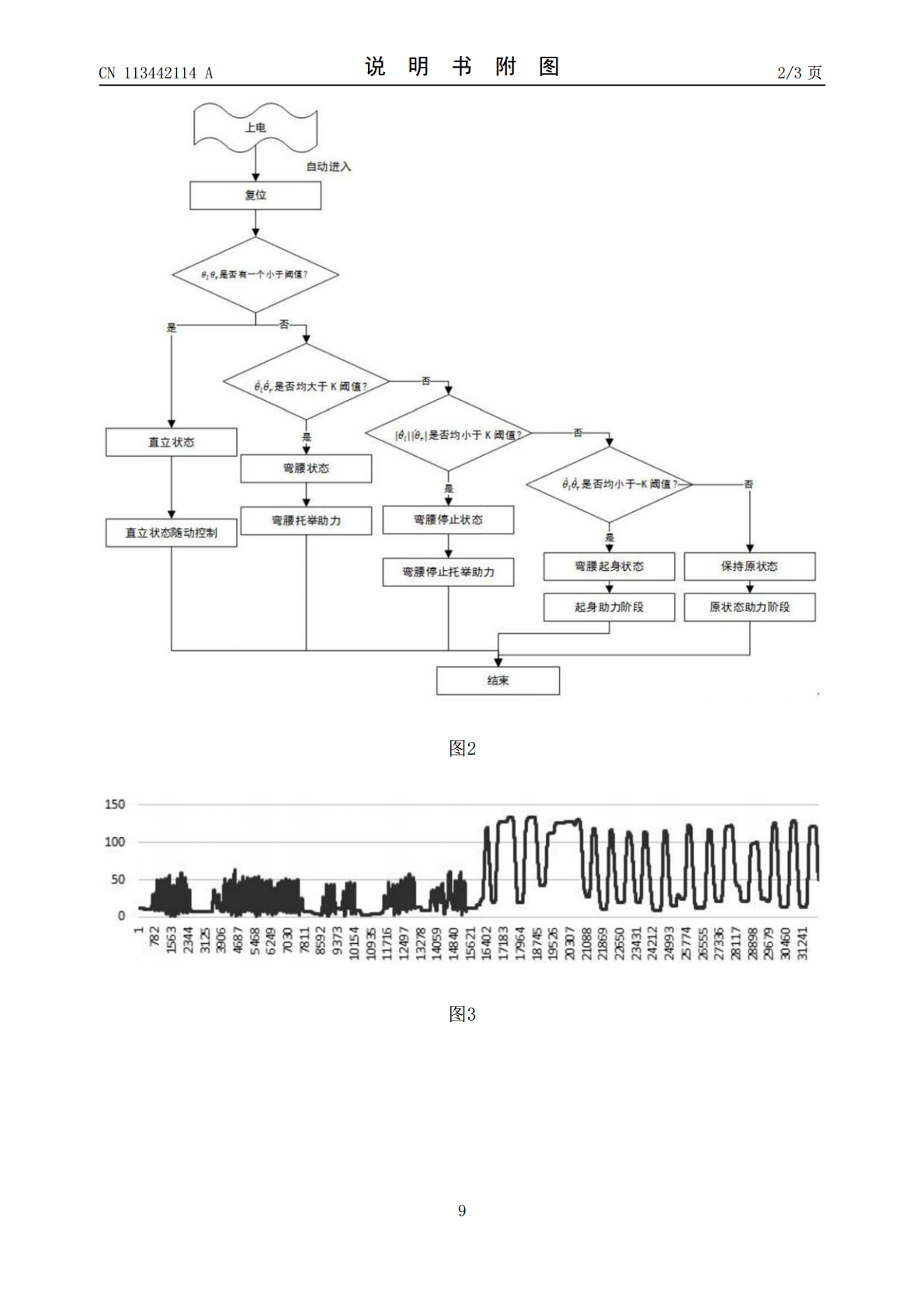
本发明提供一种腰部助力外骨骼及其控制方法。本发明基于人体髋关节运动方式,划分了人体正常的运动区间,结合人体下肢的运动和弯腰的特点,融合步态行走和弯腰搬运助力两种状态,对步态行走和弯腰两种状态进行了准确区分,并实现对人体弯腰搬运的有效辅助,同时不影响人体正常运动。在弯腰搬运时,进一步的将运动状态化分为弯腰、弯腰停止、和弯腰起身状态。将人体的弯腰动作划分后,针对不同的运动模式,设计了不同的搬运助力方式,可以实现对弯腰过程的全流程助力。
一种腰部外骨骼机器人系统及其助力控制方法.pdf
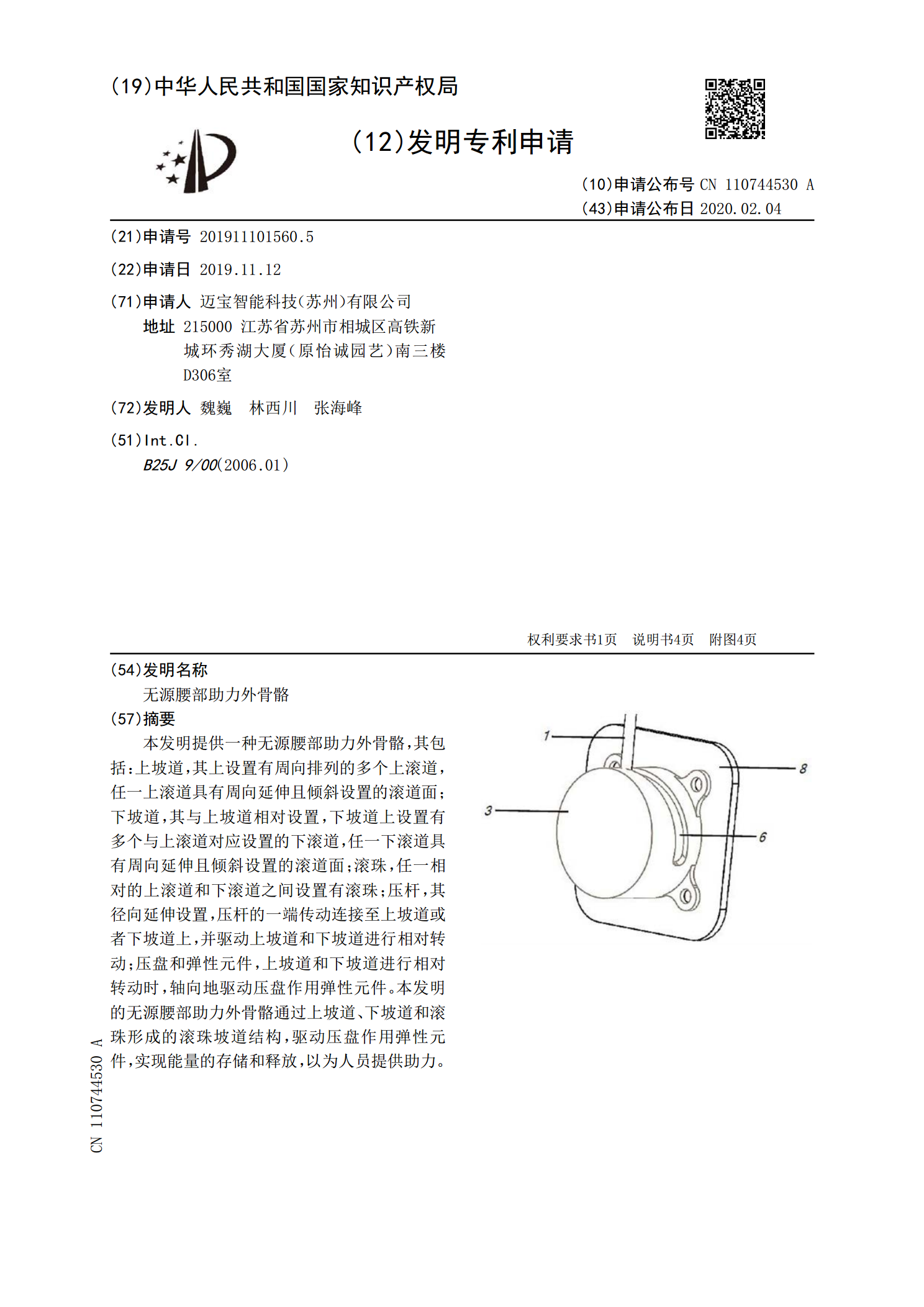
本发明涉及一种腰部外骨骼机器人系统及其助力控制方法。一种腰部外骨骼机器人系统,包括肩部绑缚结构、背部结构、腰背连接杆、两个电机外壳、腰部绑缚结构、臀部绑缚结构、两个大腿支撑杆、两个腿部绑缚结构和控制硬件系统,所述背部结构与腰背连接杆固定连接,肩部绑缚结构分别连接背部结构与腰背连接杆,腰背连接杆的两端分别连接一个电机外壳;每个电机外壳分别内嵌电机;臀部绑缚结构、左、右大腿支撑杆的两端分别与两个电机连接,两个大腿支撑杆对应连接两个大腿绑缚结构;控制硬件系统包括电池、主控板、驱动器、左编码器和右编码器。本发明提

一种搬运助力用腰部外骨骼及其控制系统.pdf
本发明涉及外骨骼设备技术领域,且公开了一种搬运助力用腰部外骨骼,包括腰部支撑臂、上支撑臂和下连接臂,所述上支撑臂通过胸部固定带与胸部固定,所述下连接臂通过腿带与大腿固定,所述腰部支撑臂通过风动马达与上支撑臂活动连接。该搬运助力用腰部外骨骼,一方面,在风动马达的作用下,实现较大的转动比,通过霍尔传感器检测转速较快的行星齿,进而提高检测的灵敏度,对应人体较小的动作即可触发助力,在实际使用时,相对于相应技术根据肌肉变化状态触发助力的启动,其次,当行星变速器行星齿维持一段时间的静止状态时即可触发风动马达叶片的锁死
无源腰部助力外骨骼.pdf
本发明提供一种无源腰部助力外骨骼,其包括:上坡道,其上设置有周向排列的多个上滚道,任一上滚道具有周向延伸且倾斜设置的滚道面;下坡道,其与上坡道相对设置,下坡道上设置有多个与上滚道对应设置的下滚道,任一下滚道具有周向延伸且倾斜设置的滚道面;滚珠,任一相对的上滚道和下滚道之间设置有滚珠;压杆,其径向延伸设置,压杆的一端传动连接至上坡道或者下坡道上,并驱动上坡道和下坡道进行相对转动;压盘和弹性元件,上坡道和下坡道进行相对转动时,轴向地驱动压盘作用弹性元件。本发明的无源腰部助力外骨骼通过上坡道、下坡道和滚珠形成的
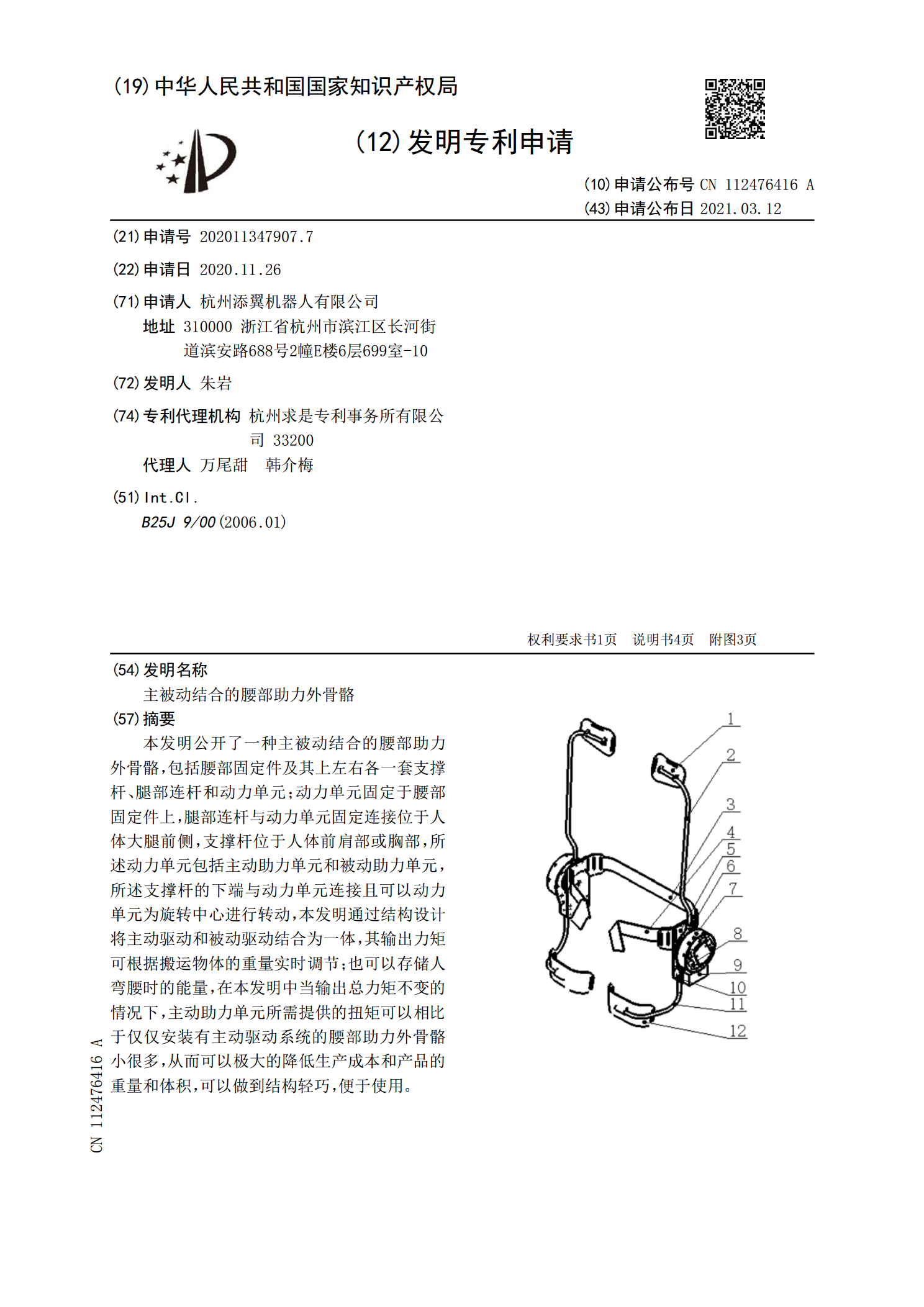
主被动结合的腰部助力外骨骼.pdf
本发明公开了一种主被动结合的腰部助力外骨骼,包括腰部固定件及其上左右各一套支撑杆、腿部连杆和动力单元;动力单元固定于腰部固定件上,腿部连杆与动力单元固定连接位于人体大腿前侧,支撑杆位于人体前肩部或胸部,所述动力单元包括主动助力单元和被动助力单元,所述支撑杆的下端与动力单元连接且可以动力单元为旋转中心进行转动,本发明通过结构设计将主动驱动和被动驱动结合为一体,其输出力矩可根据搬运物体的重量实时调节;也可以存储人弯腰时的能量,在本发明中当输出总力矩不变的情况下,主动助力单元所需提供的扭矩可以相比于仅仅安装有主