
一种腰部外骨骼机器人系统及其助力控制方法.pdf

一吃****仪凡


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种腰部外骨骼机器人系统及其助力控制方法.pdf
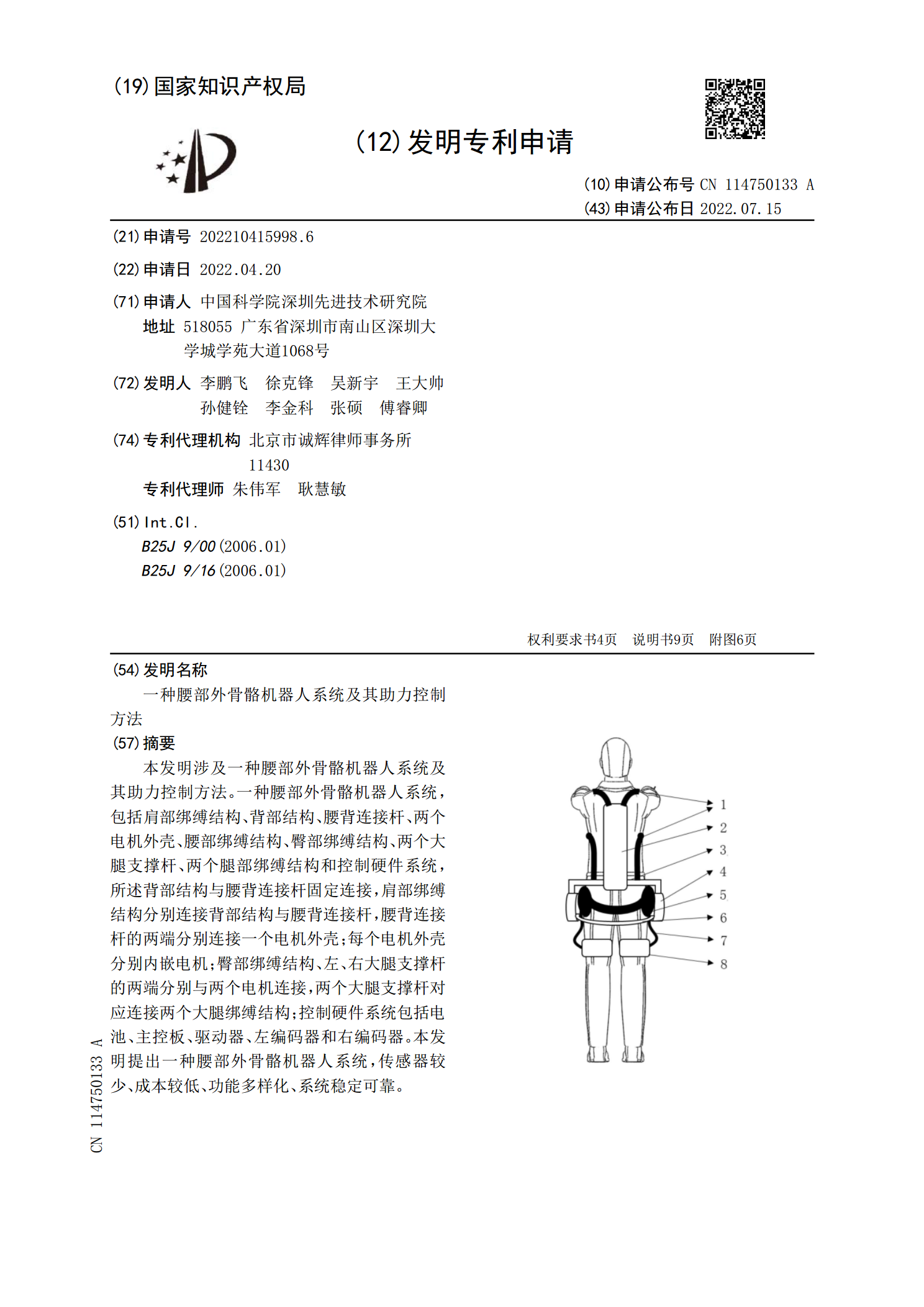
本发明涉及一种腰部外骨骼机器人系统及其助力控制方法。一种腰部外骨骼机器人系统,包括肩部绑缚结构、背部结构、腰背连接杆、两个电机外壳、腰部绑缚结构、臀部绑缚结构、两个大腿支撑杆、两个腿部绑缚结构和控制硬件系统,所述背部结构与腰背连接杆固定连接,肩部绑缚结构分别连接背部结构与腰背连接杆,腰背连接杆的两端分别连接一个电机外壳;每个电机外壳分别内嵌电机;臀部绑缚结构、左、右大腿支撑杆的两端分别与两个电机连接,两个大腿支撑杆对应连接两个大腿绑缚结构;控制硬件系统包括电池、主控板、驱动器、左编码器和右编码器。本发明提

腰部助力外骨骼及其控制方法.pdf
本发明提供一种腰部助力外骨骼及其控制方法。本发明基于人体髋关节运动方式,划分了人体正常的运动区间,结合人体下肢的运动和弯腰的特点,融合步态行走和弯腰搬运助力两种状态,对步态行走和弯腰两种状态进行了准确区分,并实现对人体弯腰搬运的有效辅助,同时不影响人体正常运动。在弯腰搬运时,进一步的将运动状态化分为弯腰、弯腰停止、和弯腰起身状态。将人体的弯腰动作划分后,针对不同的运动模式,设计了不同的搬运助力方式,可以实现对弯腰过程的全流程助力。

一种搬运助力用腰部外骨骼及其控制系统.pdf
本发明涉及外骨骼设备技术领域,且公开了一种搬运助力用腰部外骨骼,包括腰部支撑臂、上支撑臂和下连接臂,所述上支撑臂通过胸部固定带与胸部固定,所述下连接臂通过腿带与大腿固定,所述腰部支撑臂通过风动马达与上支撑臂活动连接。该搬运助力用腰部外骨骼,一方面,在风动马达的作用下,实现较大的转动比,通过霍尔传感器检测转速较快的行星齿,进而提高检测的灵敏度,对应人体较小的动作即可触发助力,在实际使用时,相对于相应技术根据肌肉变化状态触发助力的启动,其次,当行星变速器行星齿维持一段时间的静止状态时即可触发风动马达叶片的锁死
一种腰部助力外骨骼机器人.pdf
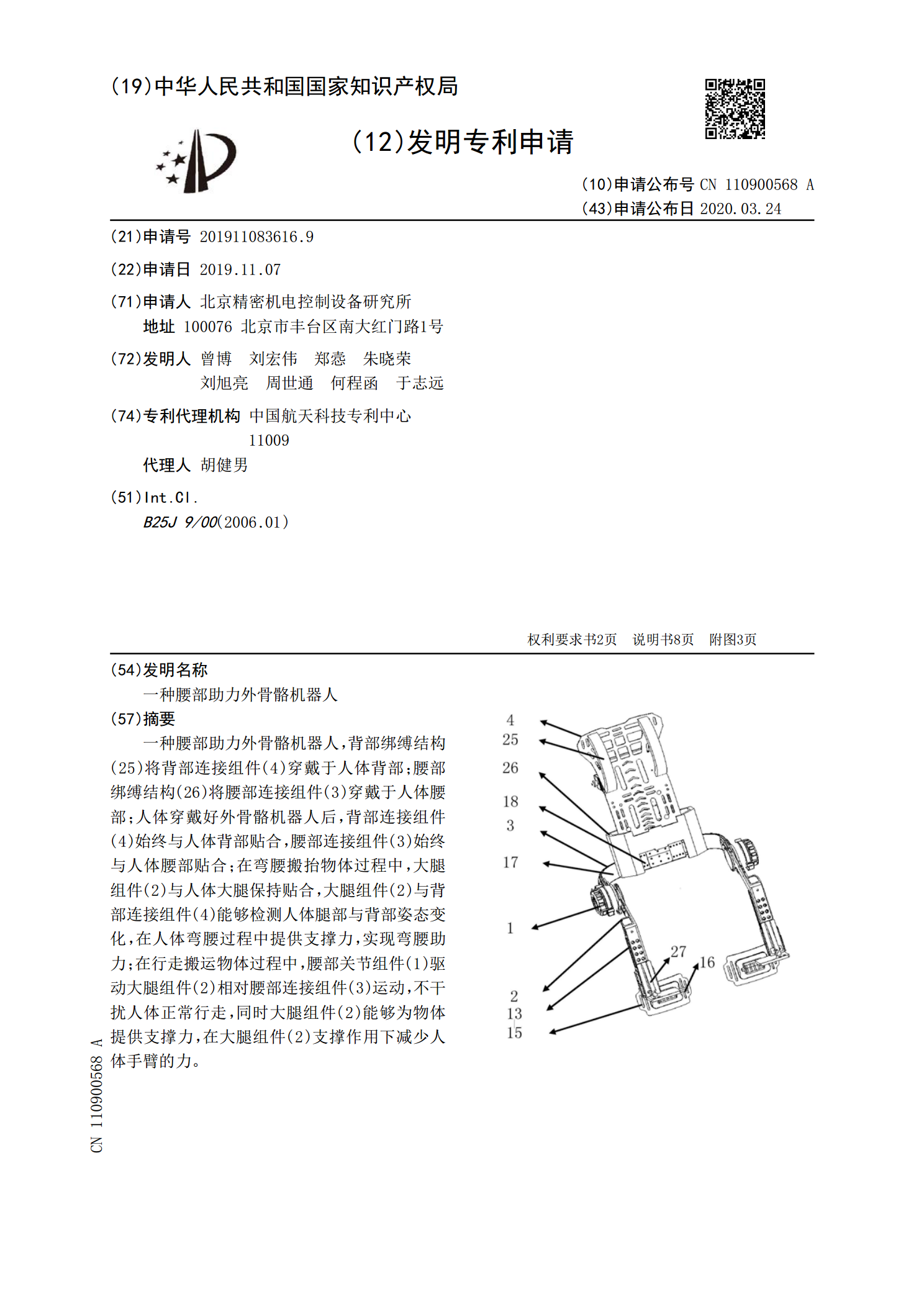
一种腰部助力外骨骼机器人,背部绑缚结构(25)将背部连接组件(4)穿戴于人体背部;腰部绑缚结构(26)将腰部连接组件(3)穿戴于人体腰部;人体穿戴好外骨骼机器人后,背部连接组件(4)始终与人体背部贴合,腰部连接组件(3)始终与人体腰部贴合;在弯腰搬抬物体过程中,大腿组件(2)与人体大腿保持贴合,大腿组件(2)与背部连接组件(4)能够检测人体腿部与背部姿态变化,在人体弯腰过程中提供支撑力,实现弯腰助力;在行走搬运物体过程中,腰部关节组件(1)驱动大腿组件(2)相对腰部连接组件(3)运动,不干扰人体正常行走,
一种助力外骨骼及其控制方法.pdf
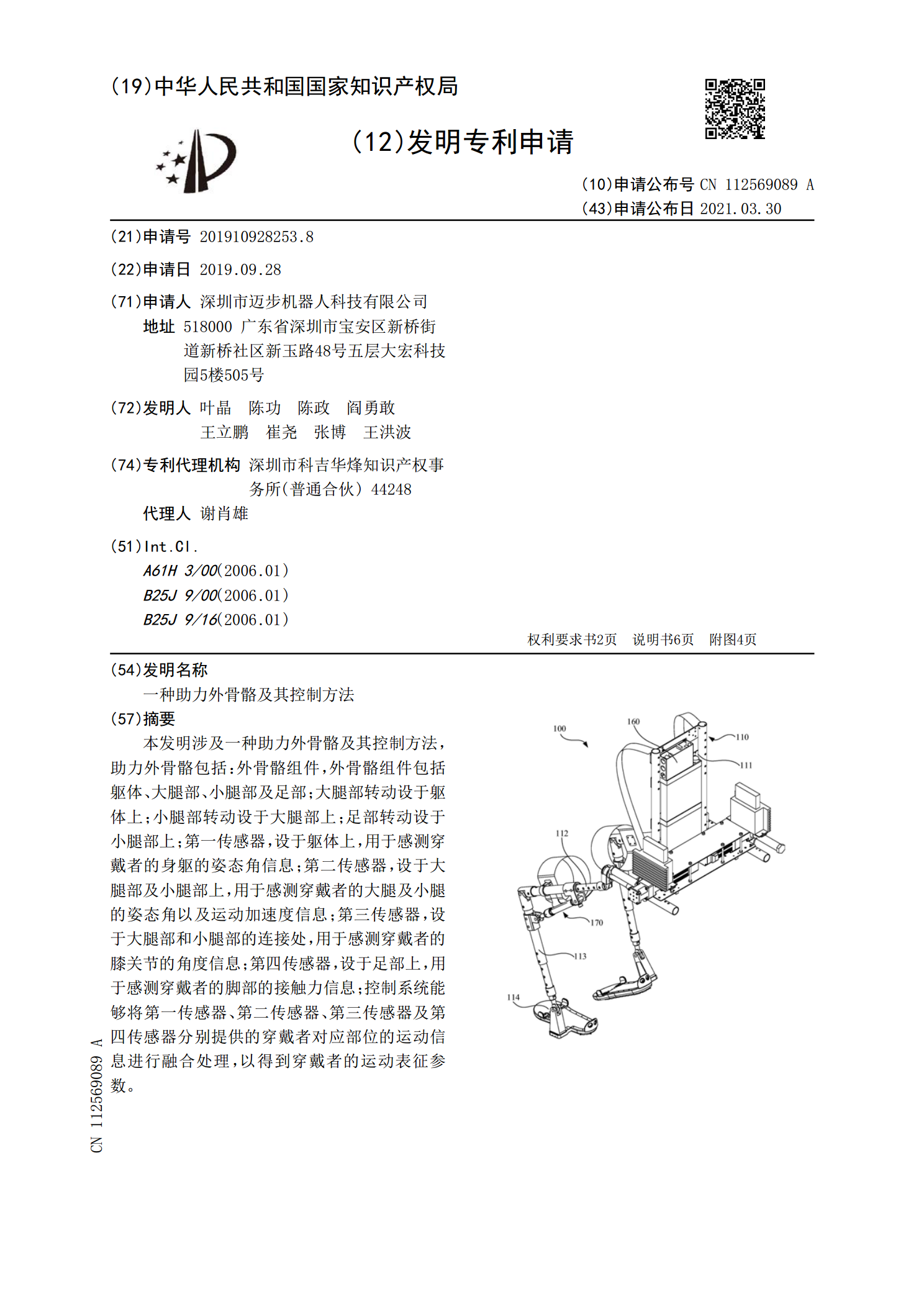
本发明涉及一种助力外骨骼及其控制方法,助力外骨骼包括:外骨骼组件,外骨骼组件包括躯体、大腿部、小腿部及足部;大腿部转动设于躯体上;小腿部转动设于大腿部上;足部转动设于小腿部上;第一传感器,设于躯体上,用于感测穿戴者的身躯的姿态角信息;第二传感器,设于大腿部及小腿部上,用于感测穿戴者的大腿及小腿的姿态角以及运动加速度信息;第三传感器,设于大腿部和小腿部的连接处,用于感测穿戴者的膝关节的角度信息;第四传感器,设于足部上,用于感测穿戴者的脚部的接触力信息;控制系统能够将第一传感器、第二传感器、第三传感器及第四传