
一种提升视觉即插即充精度的算法.pdf

夏萍****文章


1/5
2/5

3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种提升视觉即插即充精度的算法.pdf
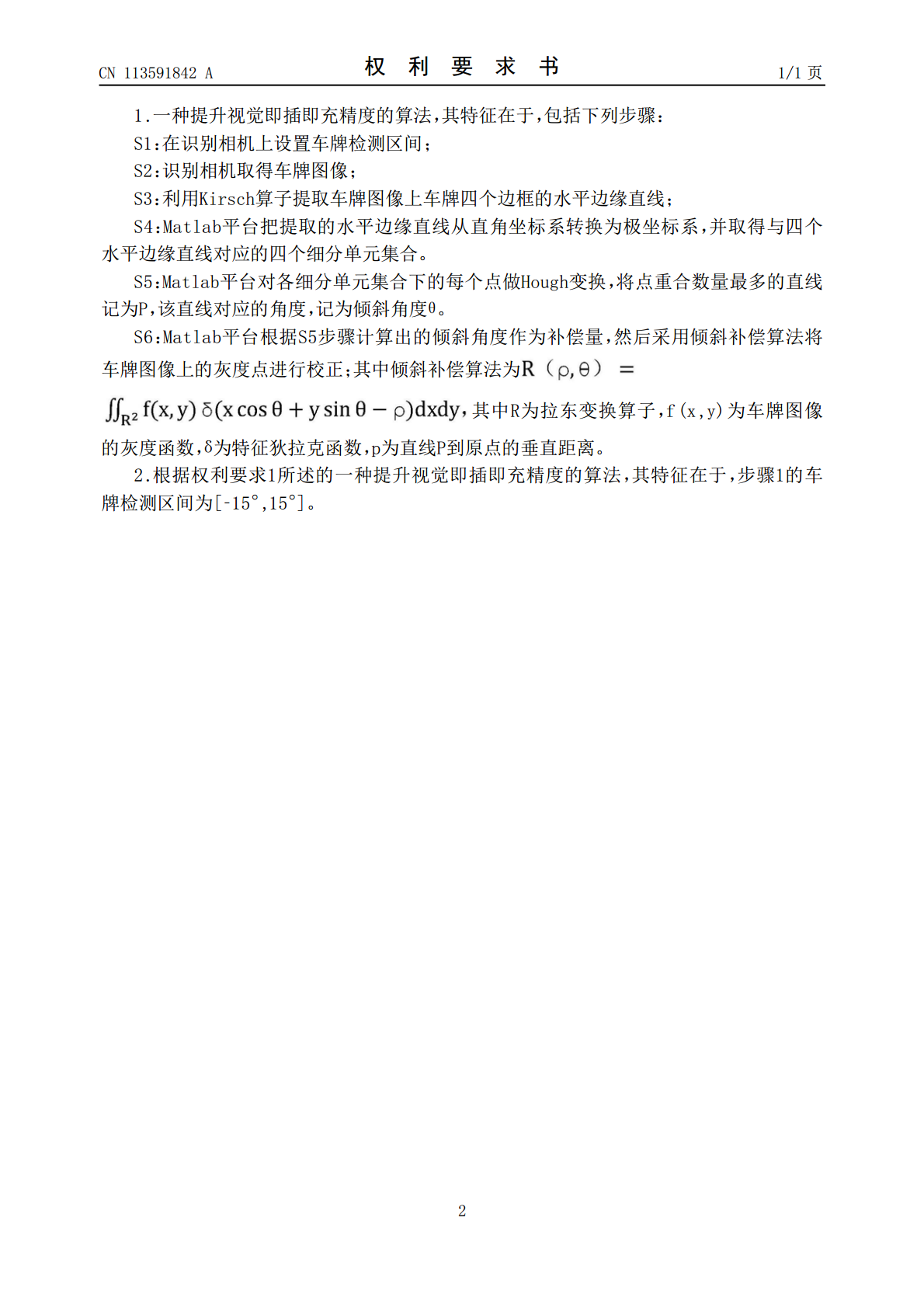
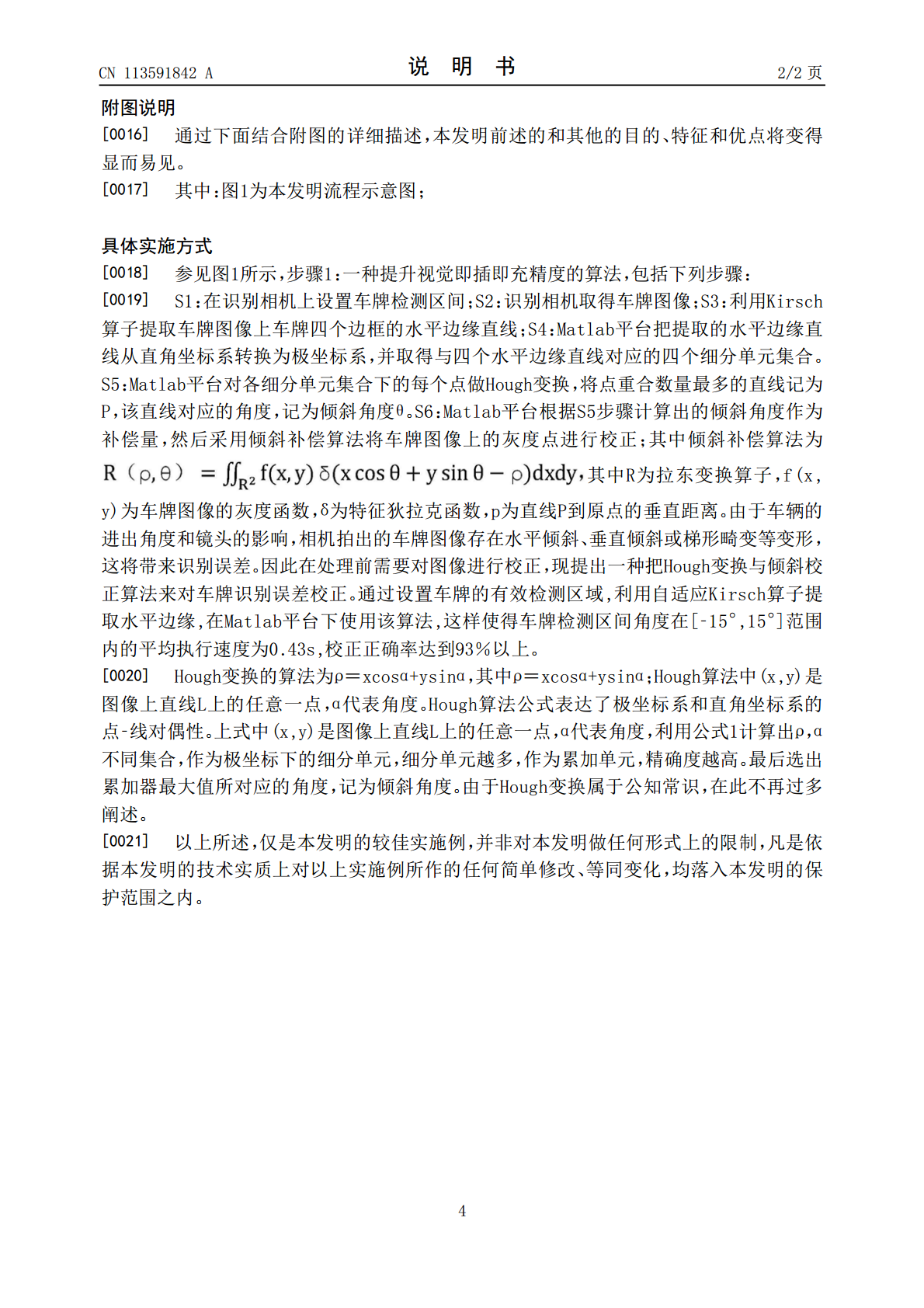
本发明涉及充电桩装置领域,尤其涉及一种提升视觉即插即充精度的算法。包括下列步骤:S1:在识别相机上设置车牌检测区间;S2:识别相机取得车牌图像;S3:利用Kirsch算子提取车牌图像上车牌四个边框的水平边缘直线;S4Matlab平台取得与四个水平边缘直线对应的四个细分单元集合;S5:Matlab平台对各细分单元集合下的每个点做Hough变换,取得倾斜角度θ;S6:Matlab平台根据倾斜角度θ作为补偿量,然后采用倾斜补偿算法将车牌图像上的灰度点进行校正;提高识别精度的算法,保证在各种工况下都能够稳定的识别

一种基于视觉检测系统的即插即充方法、装置及系统.pdf
本发明涉及充电桩领域,具体公开了一种即插即充方法通过视觉检测模块将预约的桩位锁定,当预约车辆到达预约的桩位后,对桩位解锁,车主下车后进行人脸识别,识别通过后,获得即插即充授权,当检测到充电枪插入后,则开始即插即充,解决了现有技术中车与充电桩之间直接通过CAN总线进行通信,存在安全隐患的问题,以及解决了采用手机APP作为鉴权主体存在操作繁琐的问题,本发明不仅可以提高即插即充的安全性而且可以简化操作流程。
充电桩预约和即插即充方法.pdf
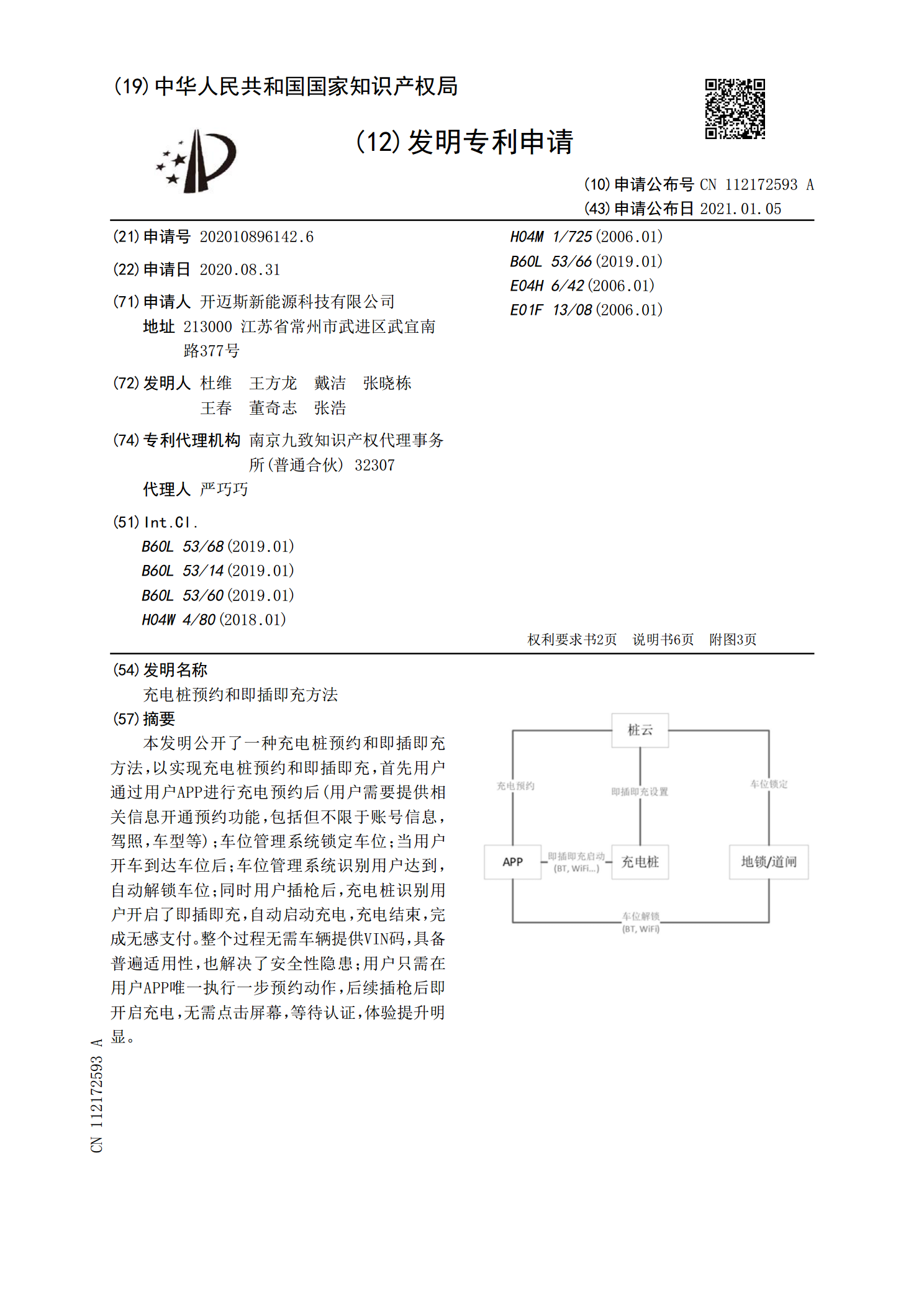
本发明公开了一种充电桩预约和即插即充方法,以实现充电桩预约和即插即充,首先用户通过用户APP进行充电预约后(用户需要提供相关信息开通预约功能,包括但不限于账号信息,驾照,车型等);车位管理系统锁定车位;当用户开车到达车位后;车位管理系统识别用户达到,自动解锁车位;同时用户插枪后,充电桩识别用户开启了即插即充,自动启动充电,充电结束,完成无感支付。整个过程无需车辆提供VIN码,具备普遍适用性,也解决了安全性隐患;用户只需在用户APP唯一执行一步预约动作,后续插枪后即开启充电,无需点击屏幕,等待认证,体验提升
充电桩即插即充的充电方法和系统.pdf
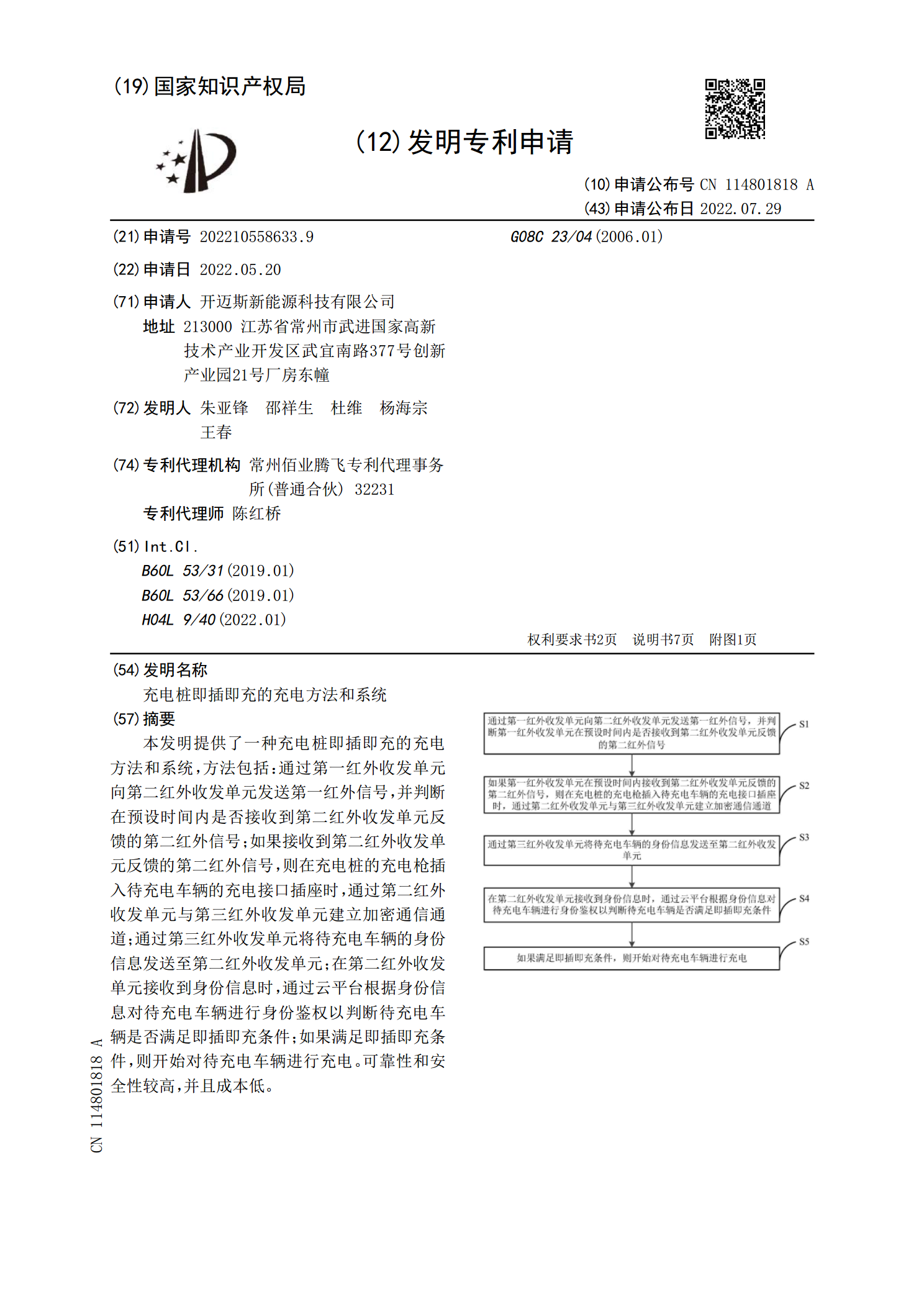
本发明提供了一种充电桩即插即充的充电方法和系统,方法包括:通过第一红外收发单元向第二红外收发单元发送第一红外信号,并判断在预设时间内是否接收到第二红外收发单元反馈的第二红外信号;如果接收到第二红外收发单元反馈的第二红外信号,则在充电桩的充电枪插入待充电车辆的充电接口插座时,通过第二红外收发单元与第三红外收发单元建立加密通信通道;通过第三红外收发单元将待充电车辆的身份信息发送至第二红外收发单元;在第二红外收发单元接收到身份信息时,通过云平台根据身份信息对待充电车辆进行身份鉴权以判断待充电车辆是否满足即插即充
一种基于蓝牙鉴权的即插即充方法及系统.pdf
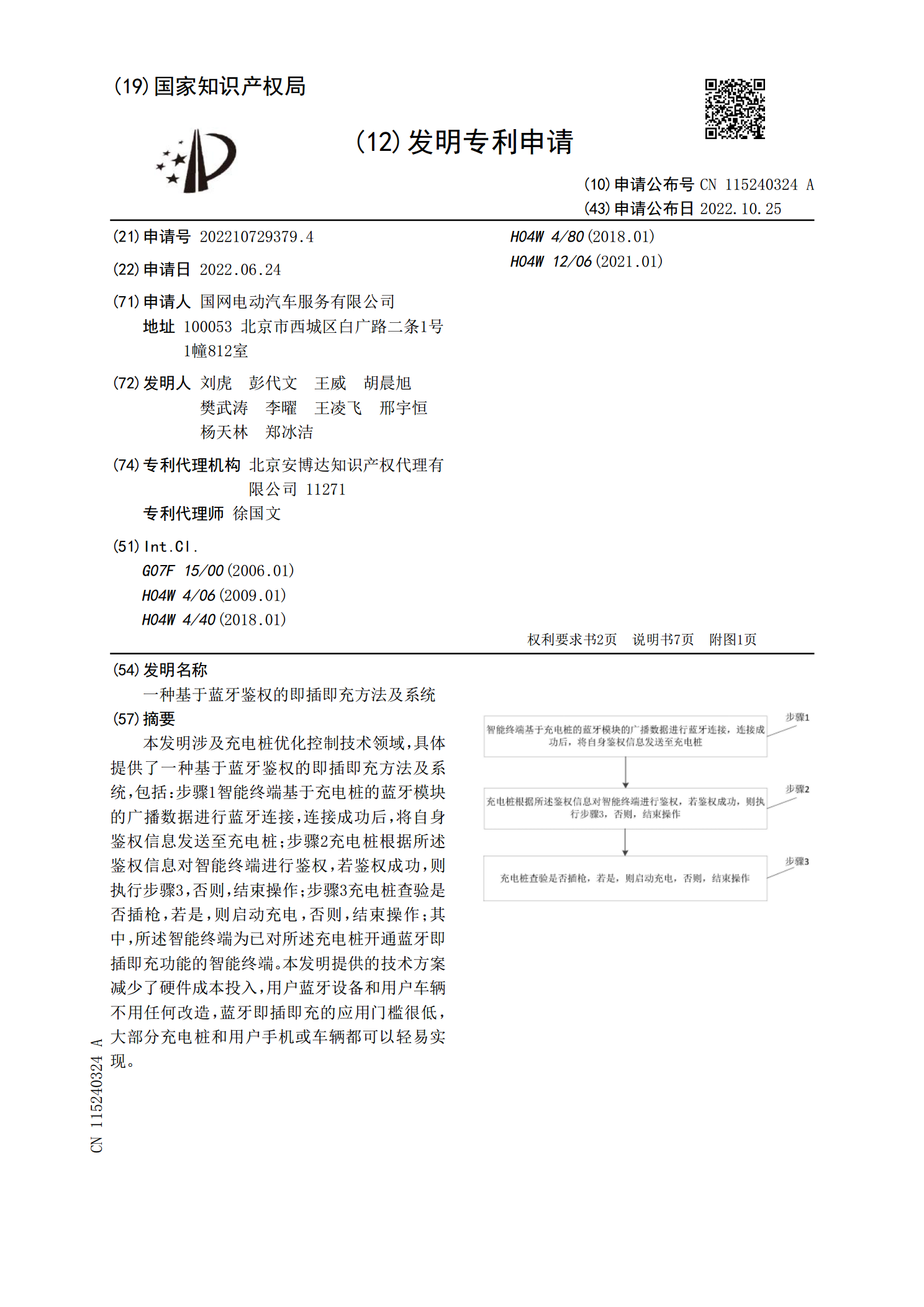
本发明涉及充电桩优化控制技术领域,具体提供了一种基于蓝牙鉴权的即插即充方法及系统,包括:步骤1智能终端基于充电桩的蓝牙模块的广播数据进行蓝牙连接,连接成功后,将自身鉴权信息发送至充电桩;步骤2充电桩根据所述鉴权信息对智能终端进行鉴权,若鉴权成功,则执行步骤3,否则,结束操作;步骤3充电桩查验是否插枪,若是,则启动充电,否则,结束操作;其中,所述智能终端为已对所述充电桩开通蓝牙即插即充功能的智能终端。本发明提供的技术方案减少了硬件成本投入,用户蓝牙设备和用户车辆不用任何改造,蓝牙即插即充的应用门槛很低,大部