
外骨骼机器人膝关节设计与控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

外骨骼机器人膝关节设计与控制.docx
外骨骼机器人膝关节设计与控制外骨骼机器人膝关节设计与控制摘要:随着现代科技的不断发展,外骨骼机器人在康复治疗、助行辅助等领域得到了广泛应用。膝关节作为人体重要的关节之一,在外骨骼机器人设计中起着关键的作用。本论文对外骨骼机器人膝关节的设计与控制进行了分析与研究,旨在提高其稳定性、适应性和安全性,为康复治疗和助行辅助提供更好的支持。第一章引言外骨骼机器人作为一种新型的医疗器械,其主要功能是为行动受限患者提供康复治疗和助行辅助。外骨骼机器人作为一体化的机械装置,需要对膝关节进行合理的设计与控制。本章将介绍外骨

外骨骼机器人膝关节设计与控制的任务书.docx
外骨骼机器人膝关节设计与控制的任务书任务书一、任务背景随着科技的不断进步,外骨骼机器人逐渐被应用于医疗康复、物流、救援等各个领域。膝关节是外骨骼机器人的重要组成部分,其设计与控制对于机器人的性能和康复效果至关重要。因此,本次任务将针对外骨骼机器人的膝关节进行设计与控制研究。二、任务目的本次任务旨在研究外骨骼机器人的膝关节设计与控制技术,提高机器人的性能和康复效果。具体目的如下:1.了解外骨骼机器人膝关节的构成、工作原理和应用场景。2.掌握膝关节设计的基本原理和方法,包括结构设计、传动机构、力学分析等。3.
膝关节弹性驱动装置及外骨骼机器人.pdf
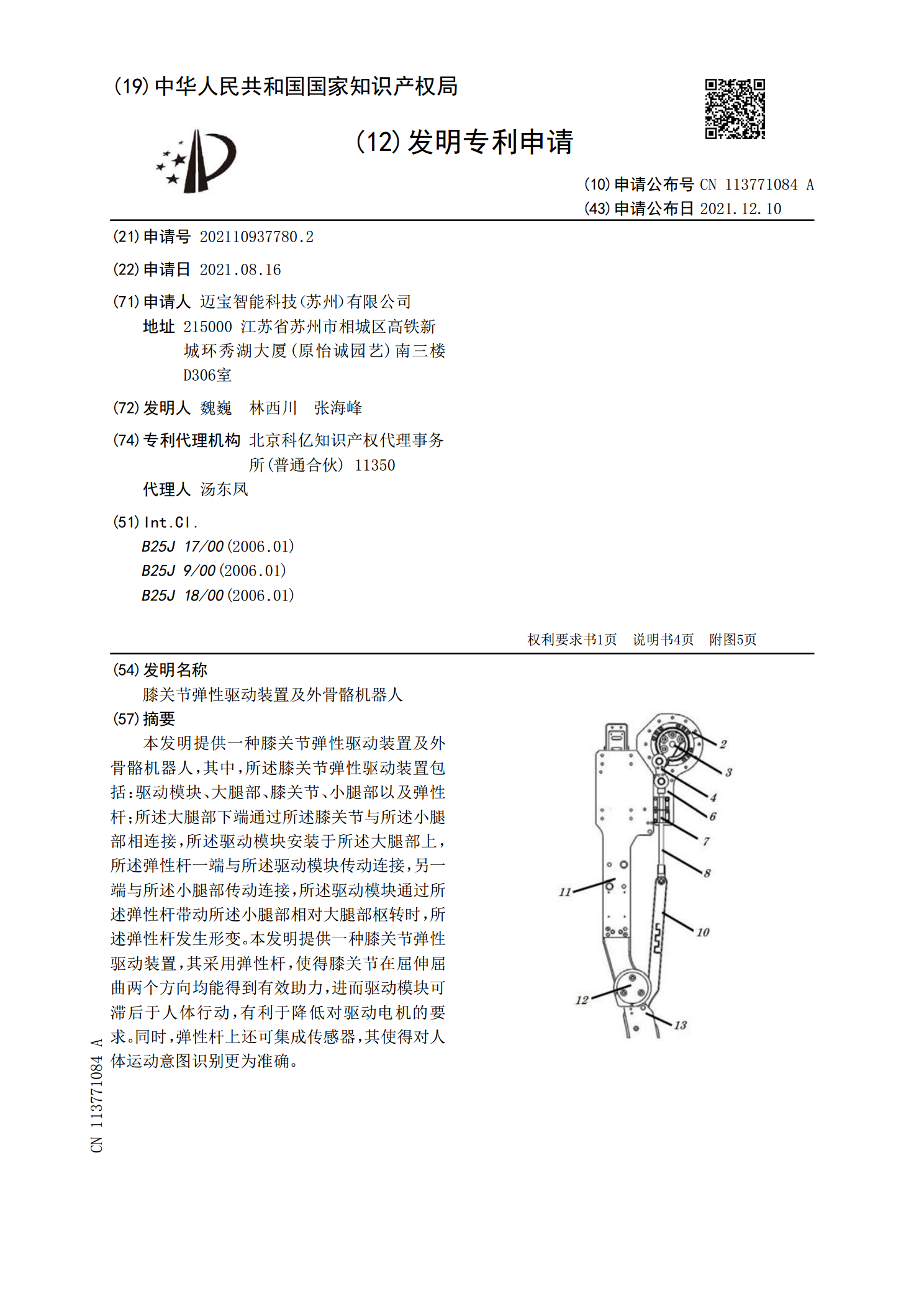
本发明提供一种膝关节弹性驱动装置及外骨骼机器人,其中,所述膝关节弹性驱动装置包括:驱动模块、大腿部、膝关节、小腿部以及弹性杆;所述大腿部下端通过所述膝关节与所述小腿部相连接,所述驱动模块安装于所述大腿部上,所述弹性杆一端与所述驱动模块传动连接,另一端与所述小腿部传动连接,所述驱动模块通过所述弹性杆带动所述小腿部相对大腿部枢转时,所述弹性杆发生形变。本发明提供一种膝关节弹性驱动装置,其采用弹性杆,使得膝关节在屈伸屈曲两个方向均能得到有效助力,进而驱动模块可滞后于人体行动,有利于降低对驱动电机的要求。同时,弹

基于电磁离合的外骨骼机器人膝关节.pdf
本发明属于机器人技术领域,涉及一种基于电磁离合的外骨骼机器人膝关节。一种基于电磁离合的外骨骼机器人膝关节,包括小腿连接件、交叉滚子轴承、线圈组件、大腿连接件和离合定位组件;小腿连接件和大腿连接件通过交叉滚子轴承连接,使膝关节能灵活地旋转,线圈组件固定设置在大腿连接件中,离合定位组件包括转轴滑台,转轴滑台穿过交叉滚子轴承、线圈组件、大腿连接件后与所述小腿连接件固定连接,通过对线圈组件通断电来使线圈组件与离合定位组件的齿圈啮合与分离,最终实现小腿连接件和大腿连接件锁紧和解锁。

膝关节外骨骼设计与控制算法开发的任务书.docx
膝关节外骨骼设计与控制算法开发的任务书任务书一、任务目标本项目旨在设计一种膝关节外骨骼,通过该外骨骼,能够辅助运动员或普通人在进行运动时减轻膝关节受力,同时能够提高运动员或普通人的运动能力,并提供相应的控制算法,实现对外骨骼的精确控制,以达到更好的使用效果。二、任务内容1.外骨骼的设计方案的确定a.根据功能和使用者的需求,确定外骨骼的设计方案。外骨骼应该能够有效地减轻膝关节的压力,提高运动员或普通人的运动能力。b.确定外骨骼的外形尺寸和材料,以便于外骨骼的装配和穿戴。c.确定外骨骼的动力来源,以便于实现对