
转移对位系统及转移对位方法.pdf

永香****能手

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

转移对位系统及转移对位方法.pdf
本申请实施例提供一种转移对位系统及转移对位方法,用于将第一发光单元与第二发光单元转移对位。转移对位系统包括:第一载台和第二载台,分别用于承载上料机构输送的第一发光单元和第二发光单元;平面移动机构,用于驱动第一载台和第二载台在水平面上的移动;吸附平台,设置于对位区域,用于在第一载台移动至对位区域后吸附第一载台上的第一发光单元;对位相机,设置于对位区域,用于分别采集第一发光单元的第一坐标数据,以及第二发光单元的第二坐标数据;处理器,用于根据第一坐标数据和第二坐标数据,控制第二载台移动,以使第二发光单元与第一发
对位合成系统及对位合成方法.pdf
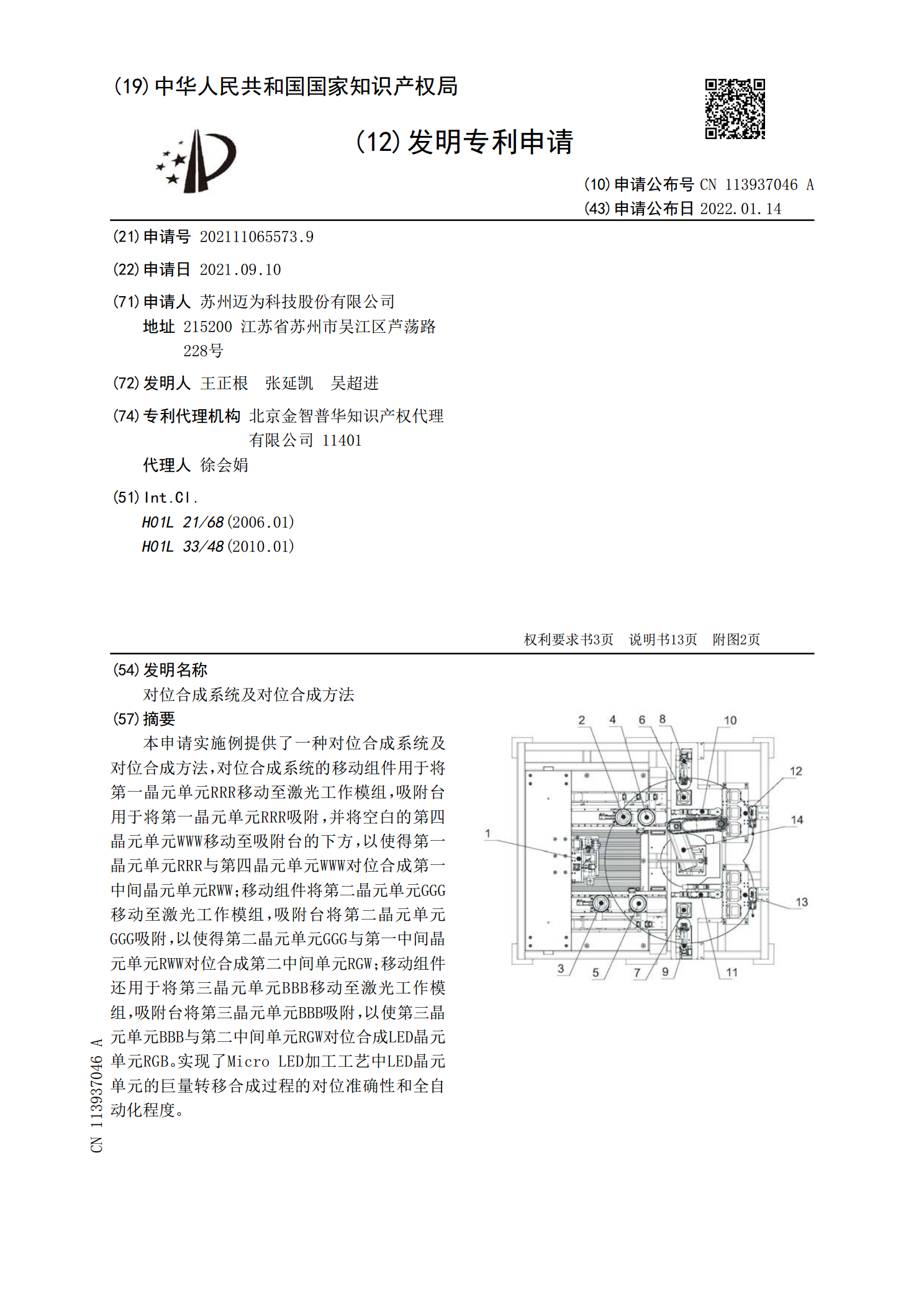
本申请实施例提供了一种对位合成系统及对位合成方法,对位合成系统的移动组件用于将第一晶元单元RRR移动至激光工作模组,吸附台用于将第一晶元单元RRR吸附,并将空白的第四晶元单元WWW移动至吸附台的下方,以使得第一晶元单元RRR与第四晶元单元WWW对位合成第一中间晶元单元RWW;移动组件将第二晶元单元GGG移动至激光工作模组,吸附台将第二晶元单元GGG吸附,以使得第二晶元单元GGG与第一中间晶元单元RWW对位合成第二中间单元RGW;移动组件还用于将第三晶元单元BBB移动至激光工作模组,吸附台将第三晶元单元BB

一种芯片转移装置及其对位方法、控制方法.pdf
本发明公开了一种芯片转移装置的对位方法。与现有技术相比,本发明首先获取并储存所有分度槽与所有工位对位好时对应的标签的坐标值,当需要进行对位操作时,只需使相应分度槽对应的标签的实际坐标值与储存的标签的坐标值保持一致,即可实现分度槽的精准对位。
显示面板与光栅面板的对位方法和对位系统.pdf
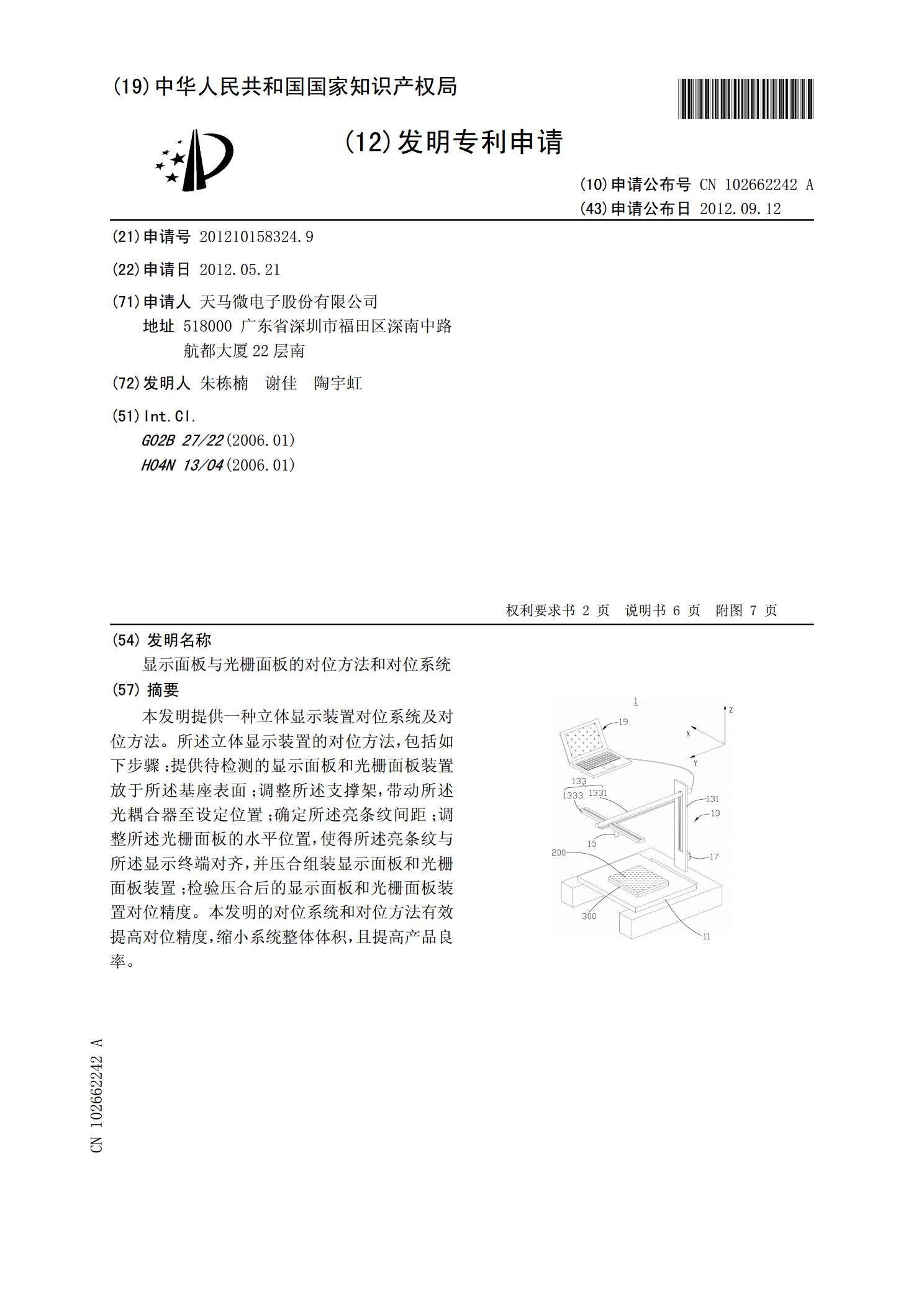
本发明提供一种立体显示装置对位系统及对位方法。所述立体显示装置的对位方法,包括如下步骤:提供待检测的显示面板和光栅面板装置放于所述基座表面;调整所述支撑架,带动所述光耦合器至设定位置;确定所述亮条纹间距;调整所述光栅面板的水平位置,使得所述亮条纹与所述显示终端对齐,并压合组装显示面板和光栅面板装置;检验压合后的显示面板和光栅面板装置对位精度。本发明的对位系统和对位方法有效提高对位精度,缩小系统整体体积,且提高产品良率。

对位方法、嵌合方法及对位机构.pdf
本申请提供了能够在不使用力传感器的情况下进行对位的对位方法、嵌合方法及对位机构。在对位方法中,使用:摄像部,拍摄对象物;移动机构,使所述对象物向包括沿所述摄像部的扫描线的方向的移动方向移动;以及控制装置,控制所述移动机构的驱动,所述摄像部获取将所述对象物和作为所述对象物的移动目的地的目标位置包含在一个摄像区域的图像,所述控制装置基于所述图像生成沿所述扫描线的方向上的所述对象物与所述目标位置的分离距离变小的所述移动机构的驱动信号,并基于所述驱动信号控制所述移动机构的驱动。