
一种介入手术机器人主端遥控系统和介入手术机器人系统.pdf

书生****35

1/10
2/10
3/10
4/10

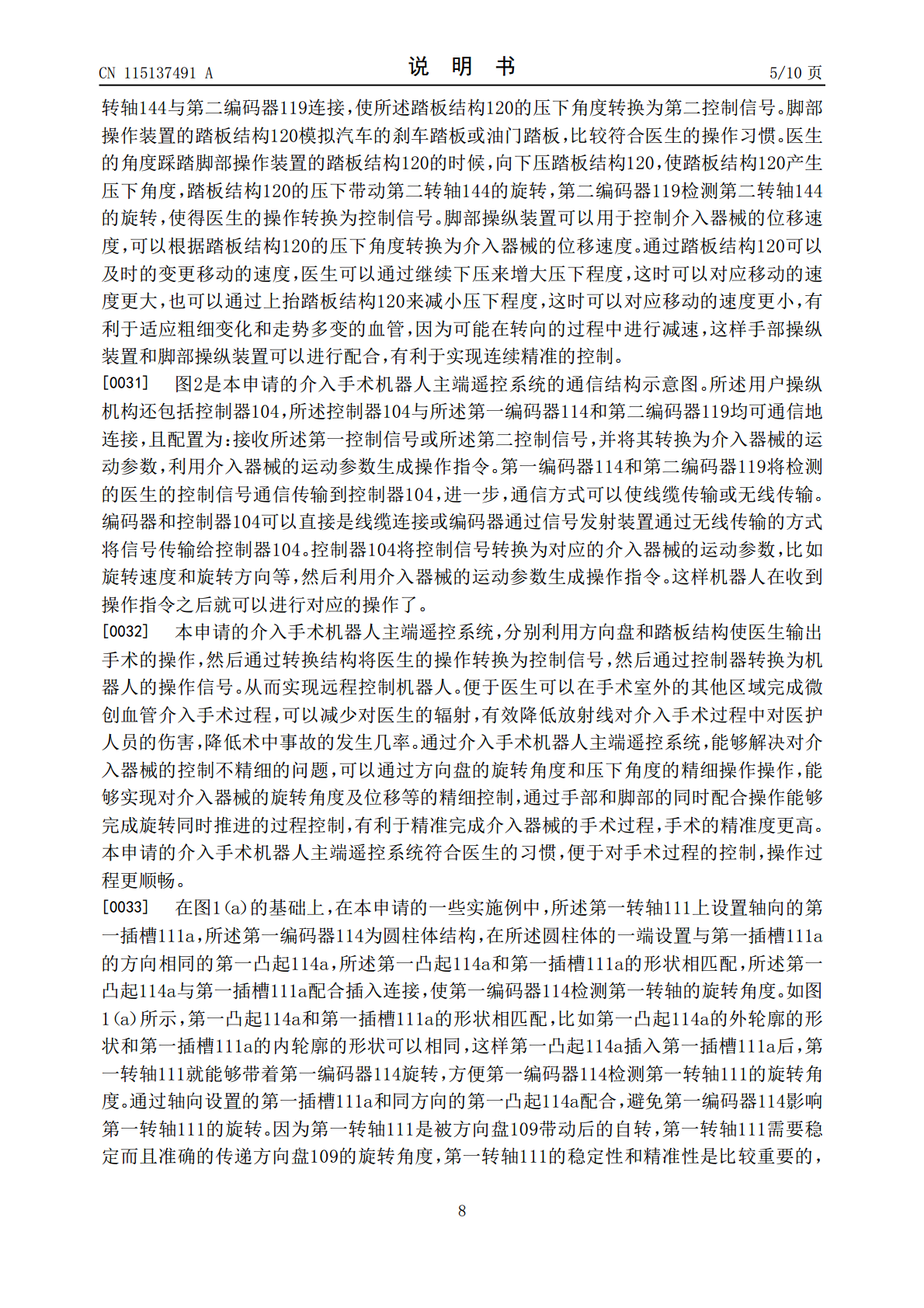
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种介入手术机器人主端遥控系统和介入手术机器人系统.pdf
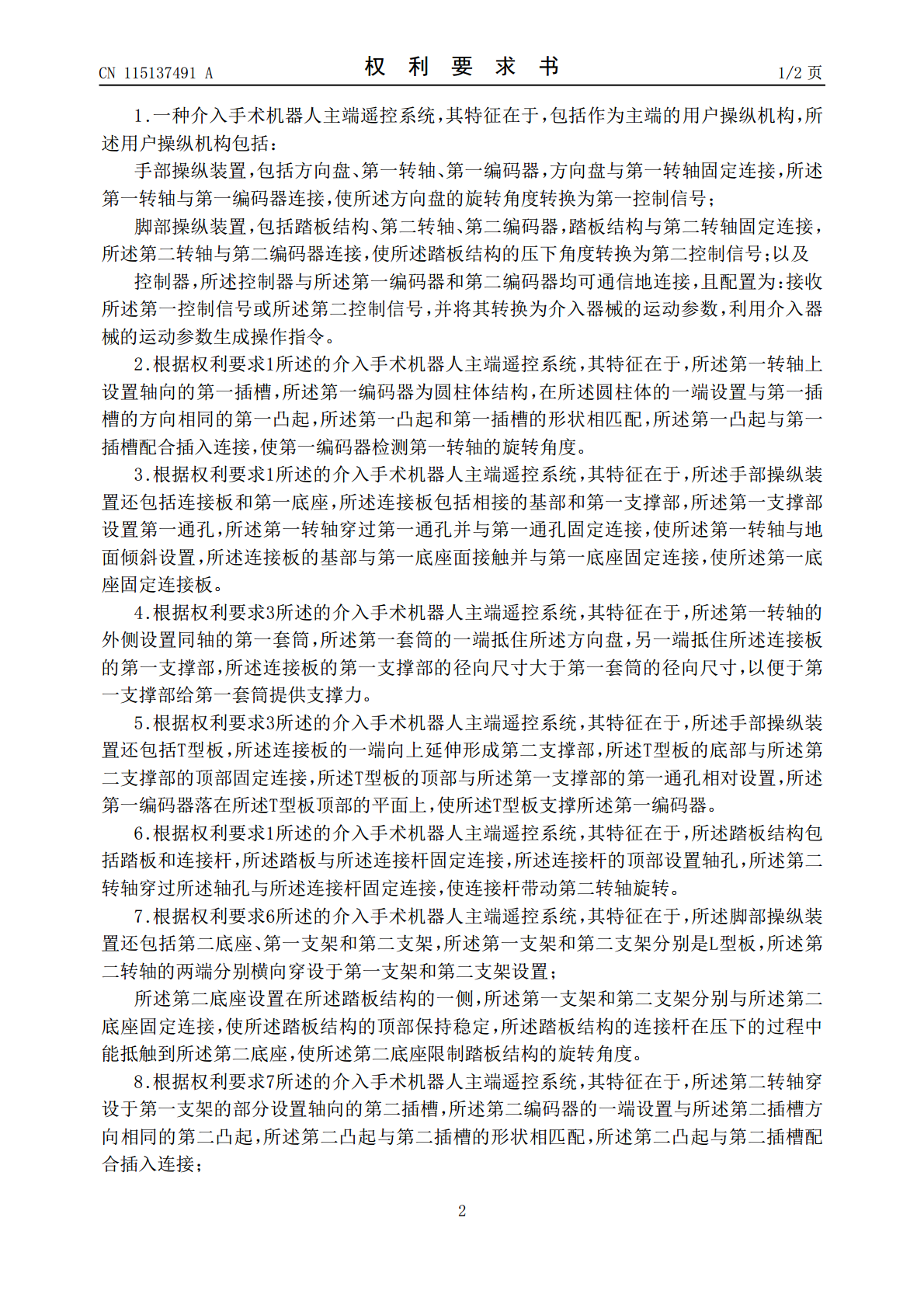
本申请涉及一种介入手术机器人主端遥控系统和介入手术机器人系统。包括作为主端的用户操纵机构,用户操纵机构包括手部操纵装置,手部操纵装置包括方向盘、第一转轴、第一编码器,方向盘与第一转轴连接,第一转轴与第一编码器连接,方向盘的旋转角度转换为第一控制信号;脚部操纵装置包括踏板结构、第二转轴、第二编码器,踏板结构与第二转轴连接,第二转轴与第二编码器连接,踏板结构的压下角度转换为第二控制信号;控制器接收第一控制信号或第二控制信号,将其转换为介入器械的运动参数,利用介入器械的运动参数生成操作指令。提高手术操作的精度和
一种介入手术机器人主端控制装置.pdf
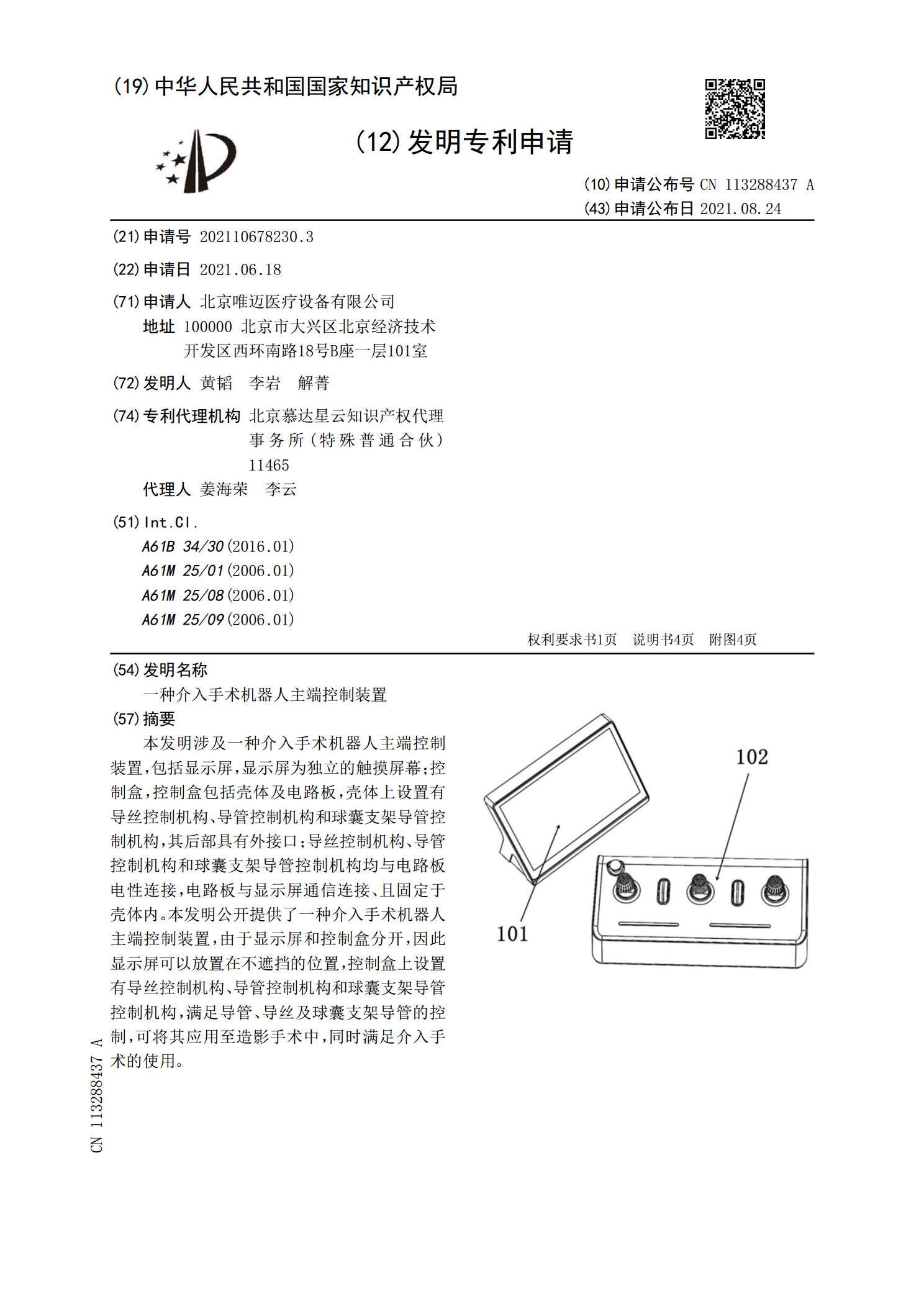
本发明涉及一种介入手术机器人主端控制装置,包括显示屏,显示屏为独立的触摸屏幕;控制盒,控制盒包括壳体及电路板,壳体上设置有导丝控制机构、导管控制机构和球囊支架导管控制机构,其后部具有外接口;导丝控制机构、导管控制机构和球囊支架导管控制机构均与电路板电性连接,电路板与显示屏通信连接、且固定于壳体内。本发明公开提供了一种介入手术机器人主端控制装置,由于显示屏和控制盒分开,因此显示屏可以放置在不遮挡的位置,控制盒上设置有导丝控制机构、导管控制机构和球囊支架导管控制机构,满足导管、导丝及球囊支架导管的控制,可将其
一种基于介入手术机器人的导航系统、主端遥控导航系统和程序产品.pdf
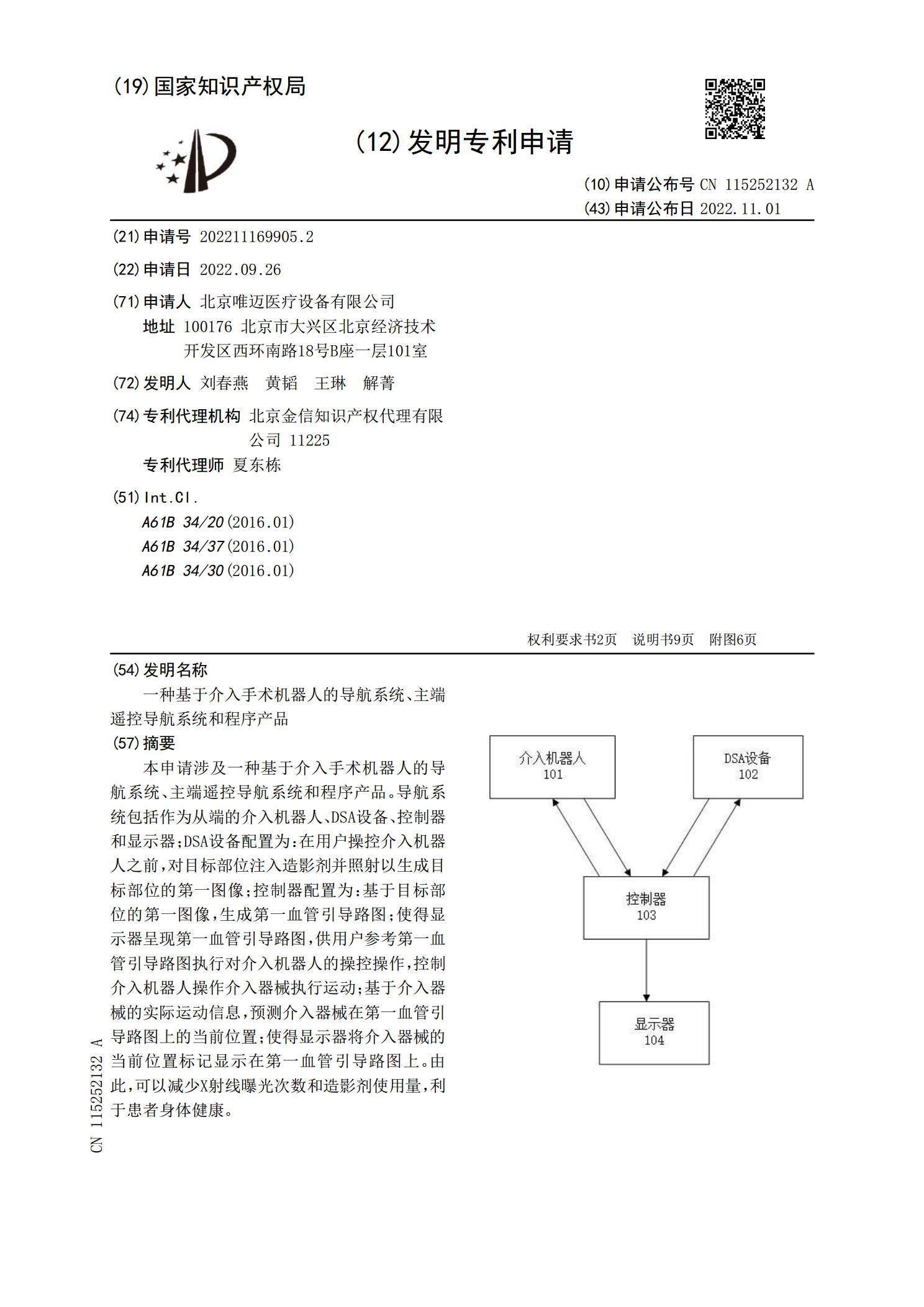
本申请涉及一种基于介入手术机器人的导航系统、主端遥控导航系统和程序产品。导航系统包括作为从端的介入机器人、DSA设备、控制器和显示器;DSA设备配置为:在用户操控介入机器人之前,对目标部位注入造影剂并照射以生成目标部位的第一图像;控制器配置为:基于目标部位的第一图像,生成第一血管引导路图;使得显示器呈现第一血管引导路图,供用户参考第一血管引导路图执行对介入机器人的操控操作,控制介入机器人操作介入器械执行运动;基于介入器械的实际运动信息,预测介入器械在第一血管引导路图上的当前位置;使得显示器将介入器械的当前

一种介入手术机器人主端操作装置及控制方法.pdf
本发明公开了一种介入手术机器人主端操作装置,包括:壳体,以及安装在壳体上的操纵部、监测部、力反馈及复位部和测量部;操纵部用于控制导管导丝进行推进和旋转动作;监测部用于监测判断手指是否抓住操纵部的控制杆;力反馈及复位部用于控制控制杆复位或限制控制杆移动;测量部用于测量控制杆的移动距离和旋转角度。本发明用于介入手术中医生在手术室外对手术室内的导管和导丝的移动和旋转的控制,通过主端操作装置发出的控制指令,控制机器人的推进装置推动导管和导丝进入患者体内,从而实现介入手术治疗的目的;能够真实模拟手术环境,且具有主端
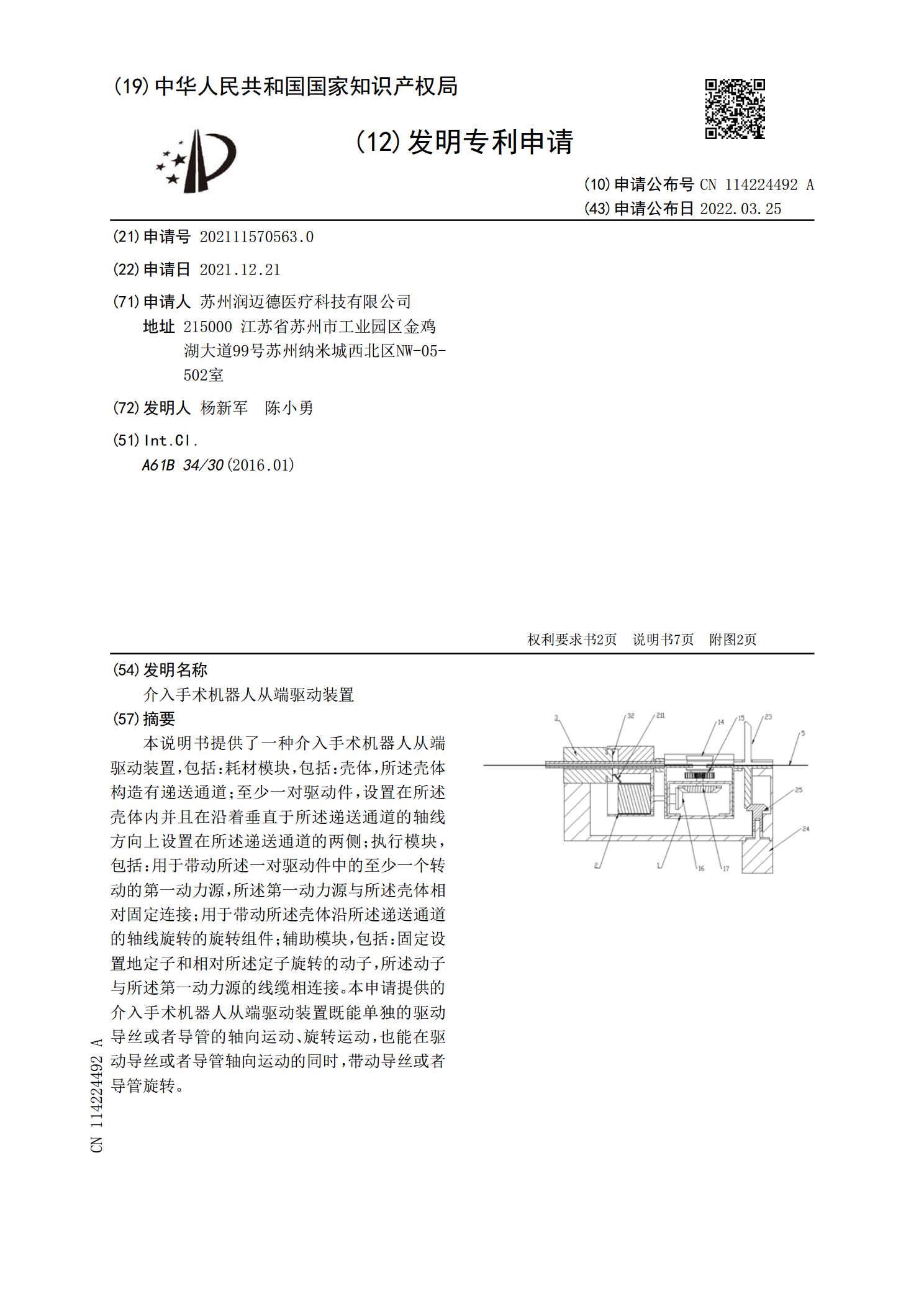
介入手术机器人从端驱动装置.pdf
本说明书提供了一种介入手术机器人从端驱动装置,包括:耗材模块,包括:壳体,所述壳体构造有递送通道;至少一对驱动件,设置在所述壳体内并且在沿着垂直于所述递送通道的轴线方向上设置在所述递送通道的两侧;执行模块,包括:用于带动所述一对驱动件中的至少一个转动的第一动力源,所述第一动力源与所述壳体相对固定连接;用于带动所述壳体沿所述递送通道的轴线旋转的旋转组件;辅助模块,包括:固定设置地定子和相对所述定子旋转的动子,所述动子与所述第一动力源的线缆相连接。本申请提供的介入手术机器人从端驱动装置既能单独的驱动导丝或者导