
一种基于脑机接口的猴子下肢外骨骼系统及其控制方法.pdf

波峻****99

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于脑机接口的猴子下肢外骨骼系统及其控制方法.pdf
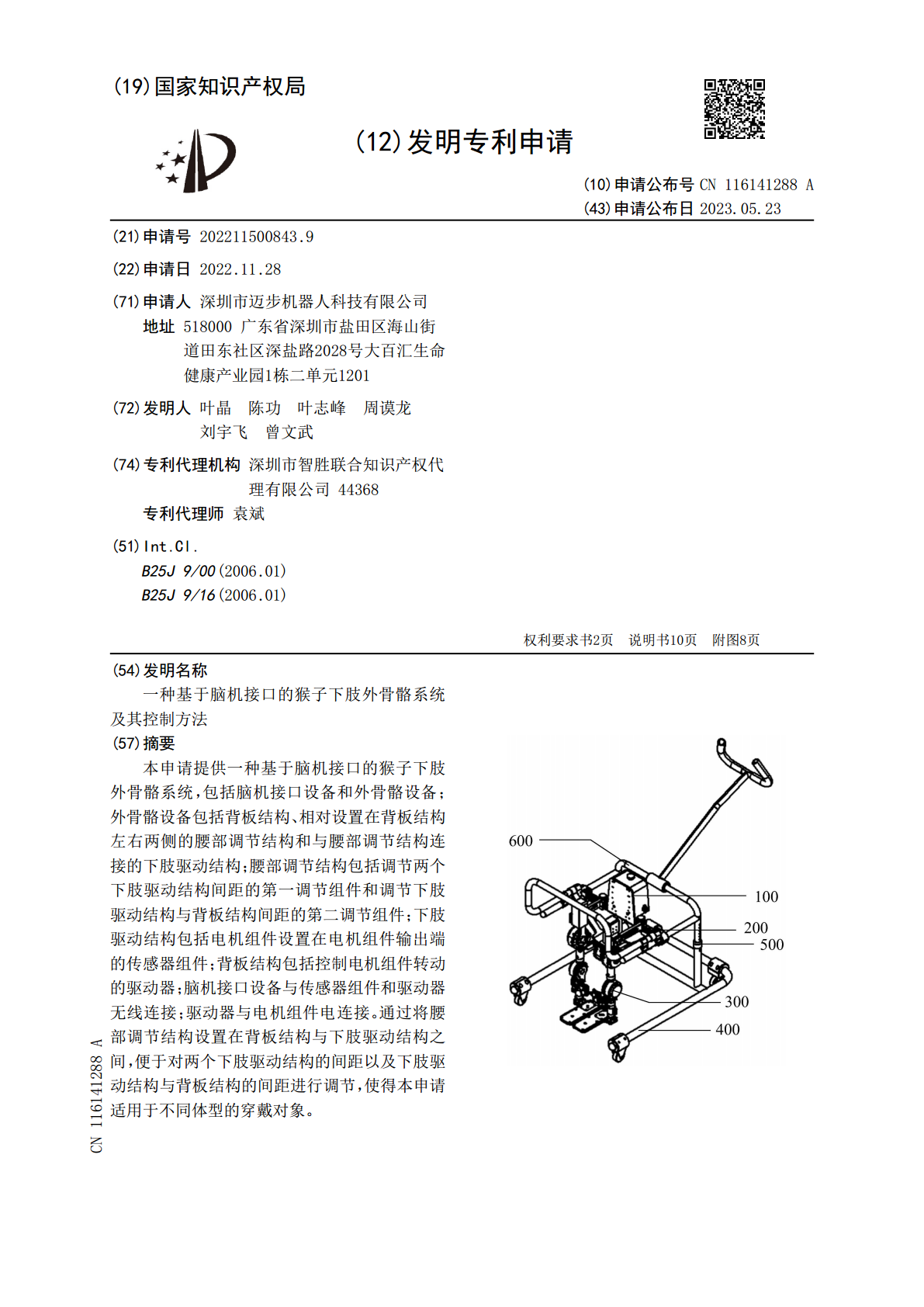
本申请提供一种基于脑机接口的猴子下肢外骨骼系统,包括脑机接口设备和外骨骼设备;外骨骼设备包括背板结构、相对设置在背板结构左右两侧的腰部调节结构和与腰部调节结构连接的下肢驱动结构;腰部调节结构包括调节两个下肢驱动结构间距的第一调节组件和调节下肢驱动结构与背板结构间距的第二调节组件;下肢驱动结构包括电机组件设置在电机组件输出端的传感器组件;背板结构包括控制电机组件转动的驱动器;脑机接口设备与传感器组件和驱动器无线连接;驱动器与电机组件电连接。通过将腰部调节结构设置在背板结构与下肢驱动结构之间,便于对两个下肢驱

基于脑机接口技术的上下肢康复系统研究.docx
基于脑机接口技术的上下肢康复系统研究随着现代医学的不断发展和人们日益关注健康问题,康复医学也得到了广泛关注。上下肢康复是康复医学中非常重要且基础的一个领域。近年来,随着脑机接口技术的快速发展,许多科学家们开始探索基于脑机接口技术的上下肢康复系统。本文旨在探讨这个新兴领域的发展和应用。一、脑机接口技术的基本原理和应用脑机接口技术又称脑机界面技术,是一种将人类大脑的神经活动通过计算机和机器人等设备转化为命令传送给另一个机器或者系统的技术。其本质是通过人脑和计算机之间的相互作用,实现人机交互,并可通过调用机器设

一种基于脑机接口的机械臂自主辅助系统及方法.pdf
本发明公开了一种基于脑机接口的机械臂自主辅助系统及方法,所述系统包括感知层、决策层和执行层,感知层包括脑电采集与检测模块和视觉识别与定位模块,用于分析识别出用户意图,并用于根据用户意图识别与定位出相应的杯子及用户嘴部的位置;执行层包括机械臂控制模块,根据从决策模块接收来的执行指令,对机械臂进行轨迹规划及控制;决策层包括决策模块,用于连接脑电采集与检测模块、视觉识别与定位模块和机械臂控制模块,实现脑电信号、定位位置及机械臂状态数据的采集和传输,机械臂执行指令的发送。本发明将视觉识别与定位技术、脑机接口和机械

基于步态状态机的康复型下肢外骨骼控制方法.docx
基于步态状态机的康复型下肢外骨骼控制方法基于步态状态机的康复型下肢外骨骼控制方法引言:近年来,下肢外骨骼(Lowerlimbexoskeleton)得到了广泛的研究和发展,被应用于康复治疗和助行辅助等领域。康复型下肢外骨骼通过激活患者下肢的肌肉活动,提供合适的支撑力和运动辅助力,帮助康复患者进行步行锻炼。为了更好地适应不同步态和姿态,控制康复型下肢外骨骼的关键技术之一是步态控制。本文提出一种基于步态状态机的康复型下肢外骨骼控制方法,旨在实现精确的步态控制和个性化的康复治疗。一、康复型下肢外骨骼系统概览:康
基于脑机接口的无人机控制与广域目标检测系统及方法.pdf
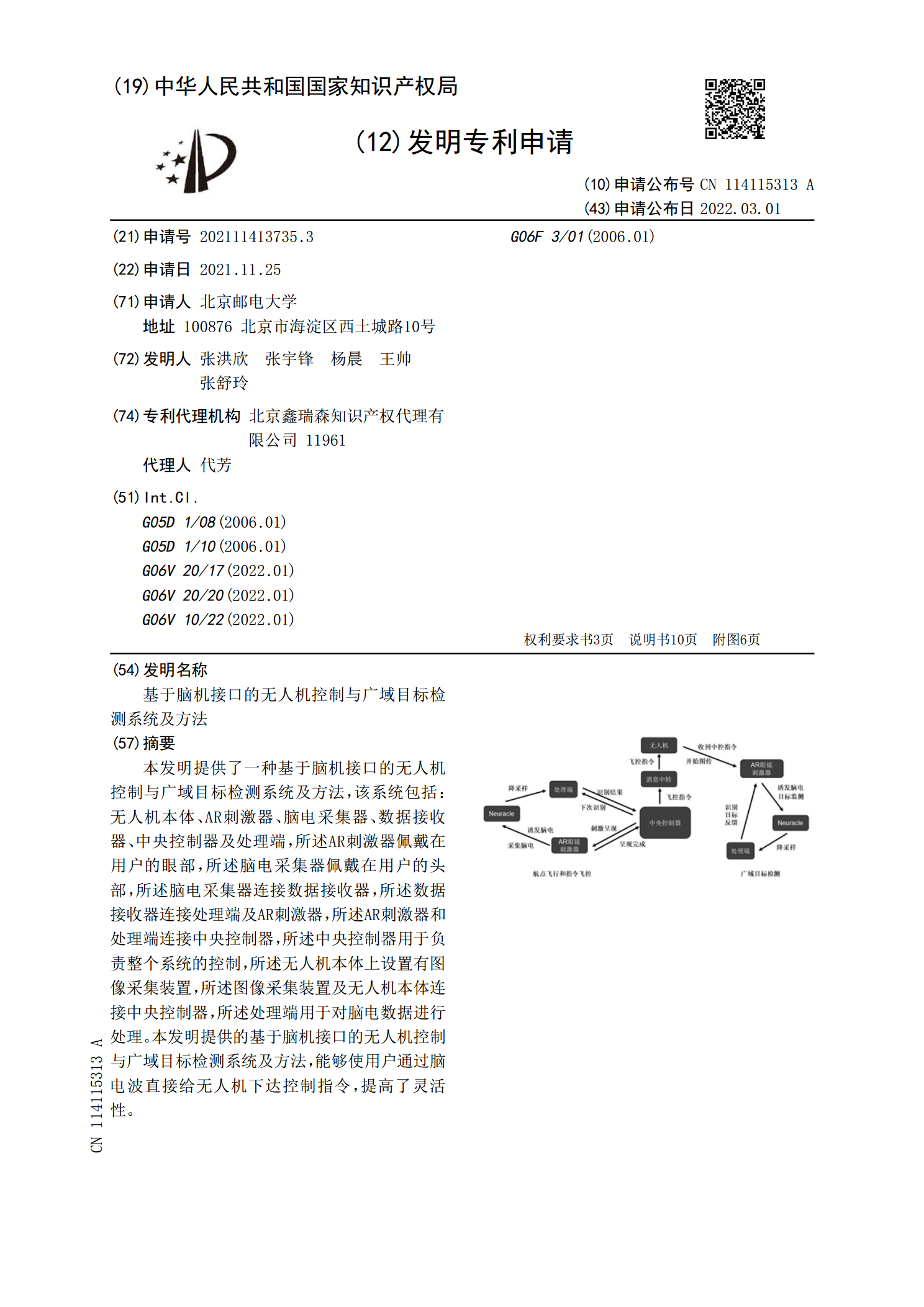
本发明提供了一种基于脑机接口的无人机控制与广域目标检测系统及方法,该系统包括:无人机本体、AR刺激器、脑电采集器、数据接收器、中央控制器及处理端,所述AR刺激器佩戴在用户的眼部,所述脑电采集器佩戴在用户的头部,所述脑电采集器连接数据接收器,所述数据接收器连接处理端及AR刺激器,所述AR刺激器和处理端连接中央控制器,所述中央控制器用于负责整个系统的控制,所述无人机本体上设置有图像采集装置,所述图像采集装置及无人机本体连接中央控制器,所述处理端用于对脑电数据进行处理。本发明提供的基于脑机接口的无人机控制与广域