
基于脑机接口的无人机控制与广域目标检测系统及方法.pdf

鸿朗****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于脑机接口的无人机控制与广域目标检测系统及方法.pdf
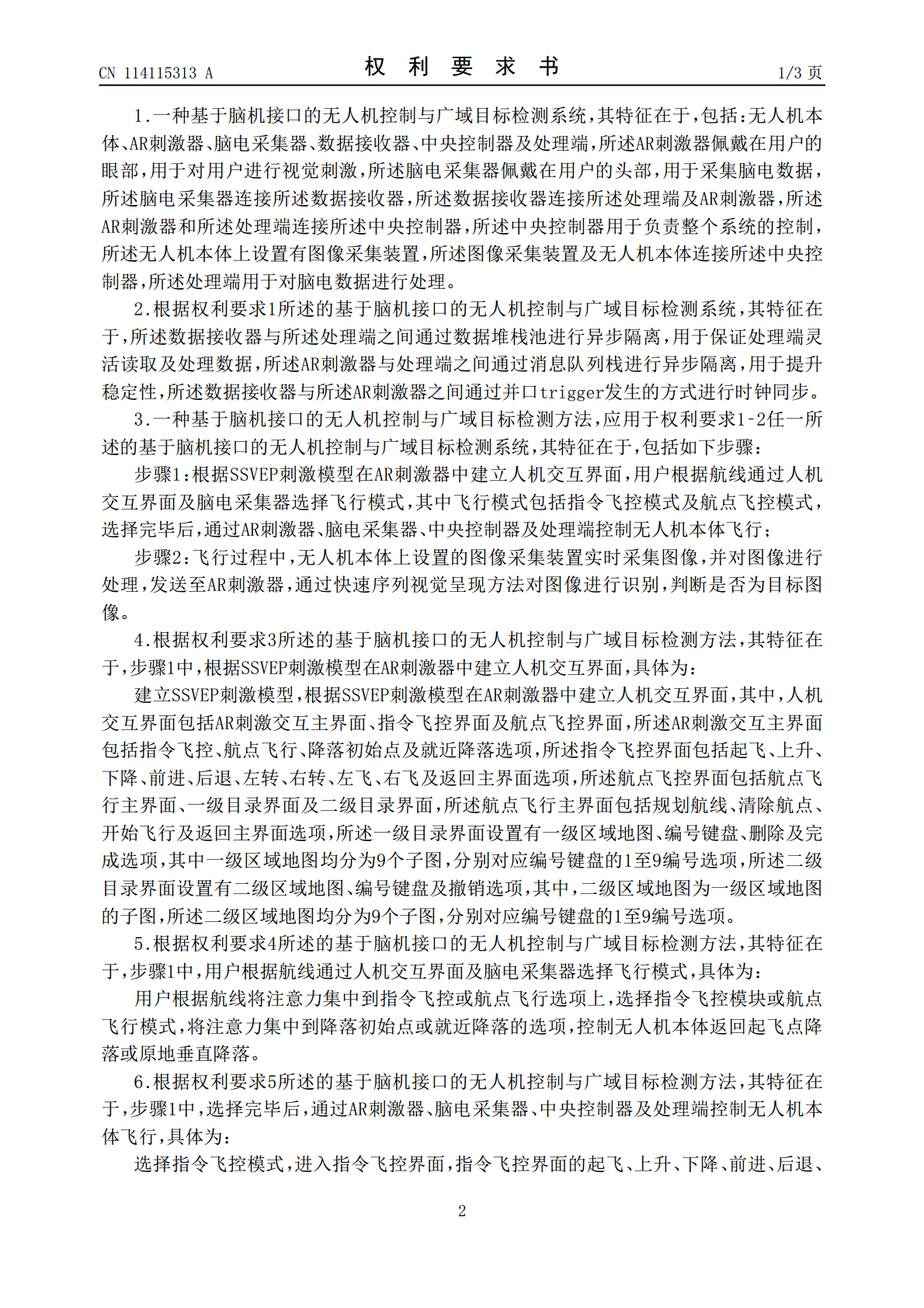
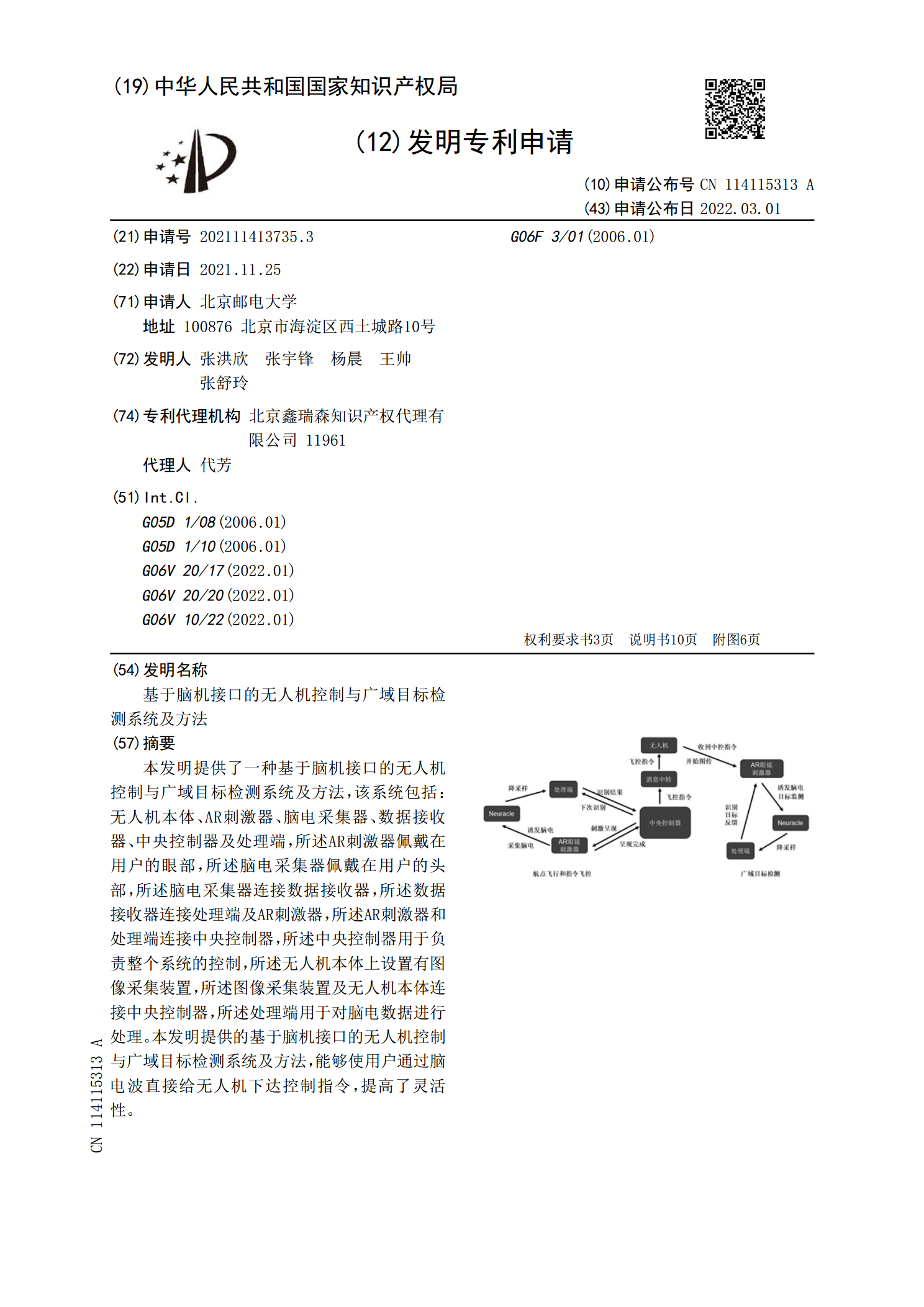
本发明提供了一种基于脑机接口的无人机控制与广域目标检测系统及方法,该系统包括:无人机本体、AR刺激器、脑电采集器、数据接收器、中央控制器及处理端,所述AR刺激器佩戴在用户的眼部,所述脑电采集器佩戴在用户的头部,所述脑电采集器连接数据接收器,所述数据接收器连接处理端及AR刺激器,所述AR刺激器和处理端连接中央控制器,所述中央控制器用于负责整个系统的控制,所述无人机本体上设置有图像采集装置,所述图像采集装置及无人机本体连接中央控制器,所述处理端用于对脑电数据进行处理。本发明提供的基于脑机接口的无人机控制与广域
多脑协同脑机接口系统及基于该系统实现的视频目标检测方法.pdf
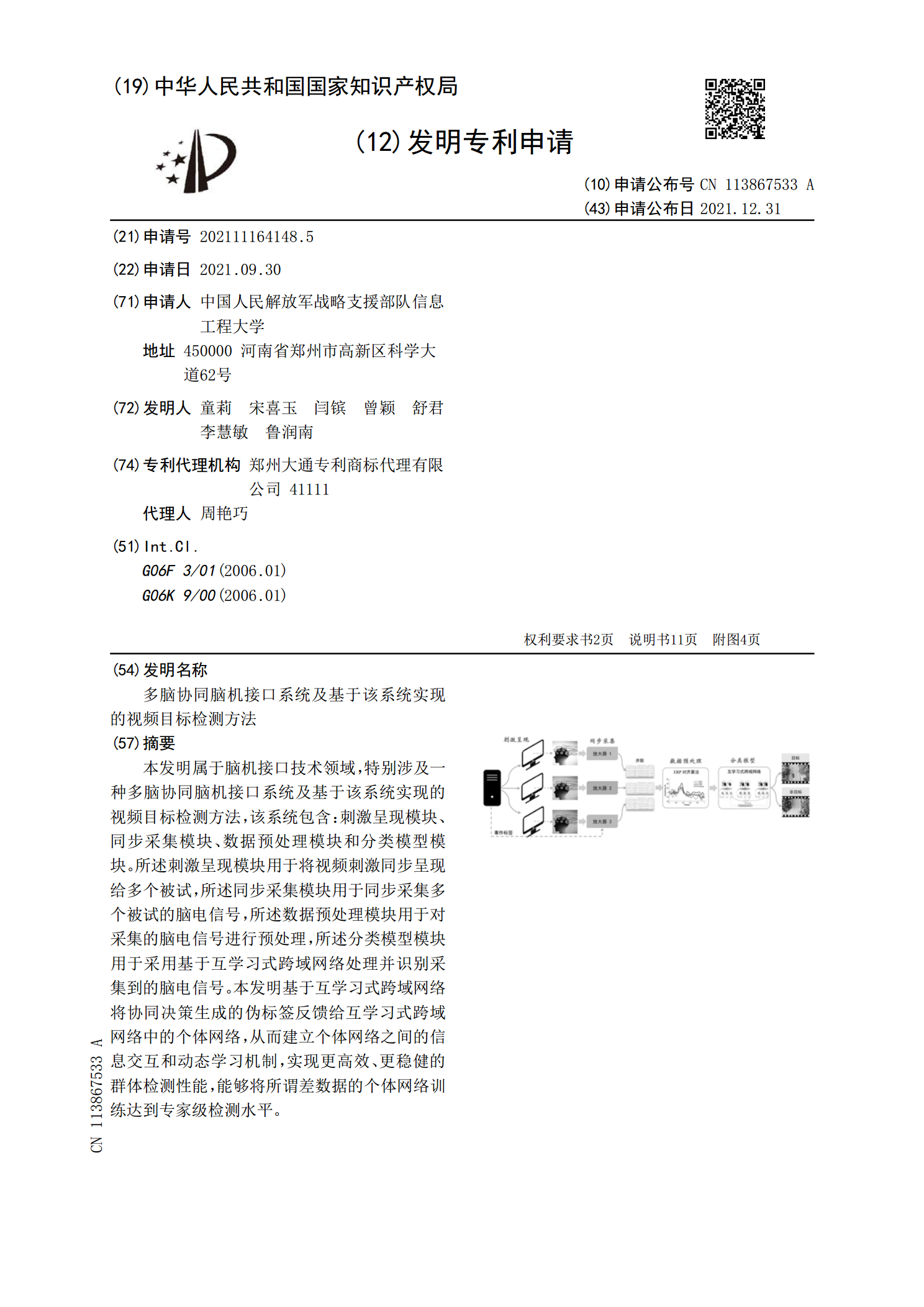
本发明属于脑机接口技术领域,特别涉及一种多脑协同脑机接口系统及基于该系统实现的视频目标检测方法,该系统包含:刺激呈现模块、同步采集模块、数据预处理模块和分类模型模块。所述刺激呈现模块用于将视频刺激同步呈现给多个被试,所述同步采集模块用于同步采集多个被试的脑电信号,所述数据预处理模块用于对采集的脑电信号进行预处理,所述分类模型模块用于采用基于互学习式跨域网络处理并识别采集到的脑电信号。本发明基于互学习式跨域网络将协同决策生成的伪标签反馈给互学习式跨域网络中的个体网络,从而建立个体网络之间的信息交互和动态学习

基于脑电信号的脑机接口的检测方法、系统、介质及设备.pdf
本发明提供一种基于脑电信号的脑机接口的检测方法、系统、介质及设备,所述基于脑电信号的脑机接口的检测方法包括:获取原始脑电信号;所述原始脑电信号为用户在注视不同频率下刺激目标所产生的信号;对所述原始脑电信号进行所有刺激目标频率发的对应倍频的循环移位处理,以获取循环移位后的信号;计算不同频率刺激下循环移位后的信号的短时自相关函数;根据短时自相关函数,确定用户正在注视频率对应的倍频。本发明有效利用了SSVEP信号的周期性,利用自相关函数检测SSVEP信号的周期成功实现了对SSVEP信号的盲检测,具有更高的短时识

一种基于脑机接口的猴子下肢外骨骼系统及其控制方法.pdf
本申请提供一种基于脑机接口的猴子下肢外骨骼系统,包括脑机接口设备和外骨骼设备;外骨骼设备包括背板结构、相对设置在背板结构左右两侧的腰部调节结构和与腰部调节结构连接的下肢驱动结构;腰部调节结构包括调节两个下肢驱动结构间距的第一调节组件和调节下肢驱动结构与背板结构间距的第二调节组件;下肢驱动结构包括电机组件设置在电机组件输出端的传感器组件;背板结构包括控制电机组件转动的驱动器;脑机接口设备与传感器组件和驱动器无线连接;驱动器与电机组件电连接。通过将腰部调节结构设置在背板结构与下肢驱动结构之间,便于对两个下肢驱
基于自适应脑电通道选择的脑机接口解码加速方法及系统.pdf
本发明提供一种基于自适应脑电通道选择的脑机接口解码加速方法及系统,包括:获取待解码脑电数据;将所述待解码脑电数据输入解码模型,输出对所述待解码脑电数据进行意图解码的解码结果;其中,所述解码模型用于基于所述待解码脑电数据压缩为的最少通道数据进行特征提取得到策略特征,并根据所述策略特征选择最优通道数目以获取最优通道数据后,通过所述最优通道数据对所述待解码脑电数据进行意图解码。用以解决现有技术利用多通道进行脑电数据解码,造成解码效率低下的缺陷,实现通过解码模型进行待解码脑电数据解码通道的转换和选择,在不降低甚至