
一种基于脑机接口的机械臂自主辅助系统及方法.pdf

邻家****曼玉

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于脑机接口的机械臂自主辅助系统及方法.pdf
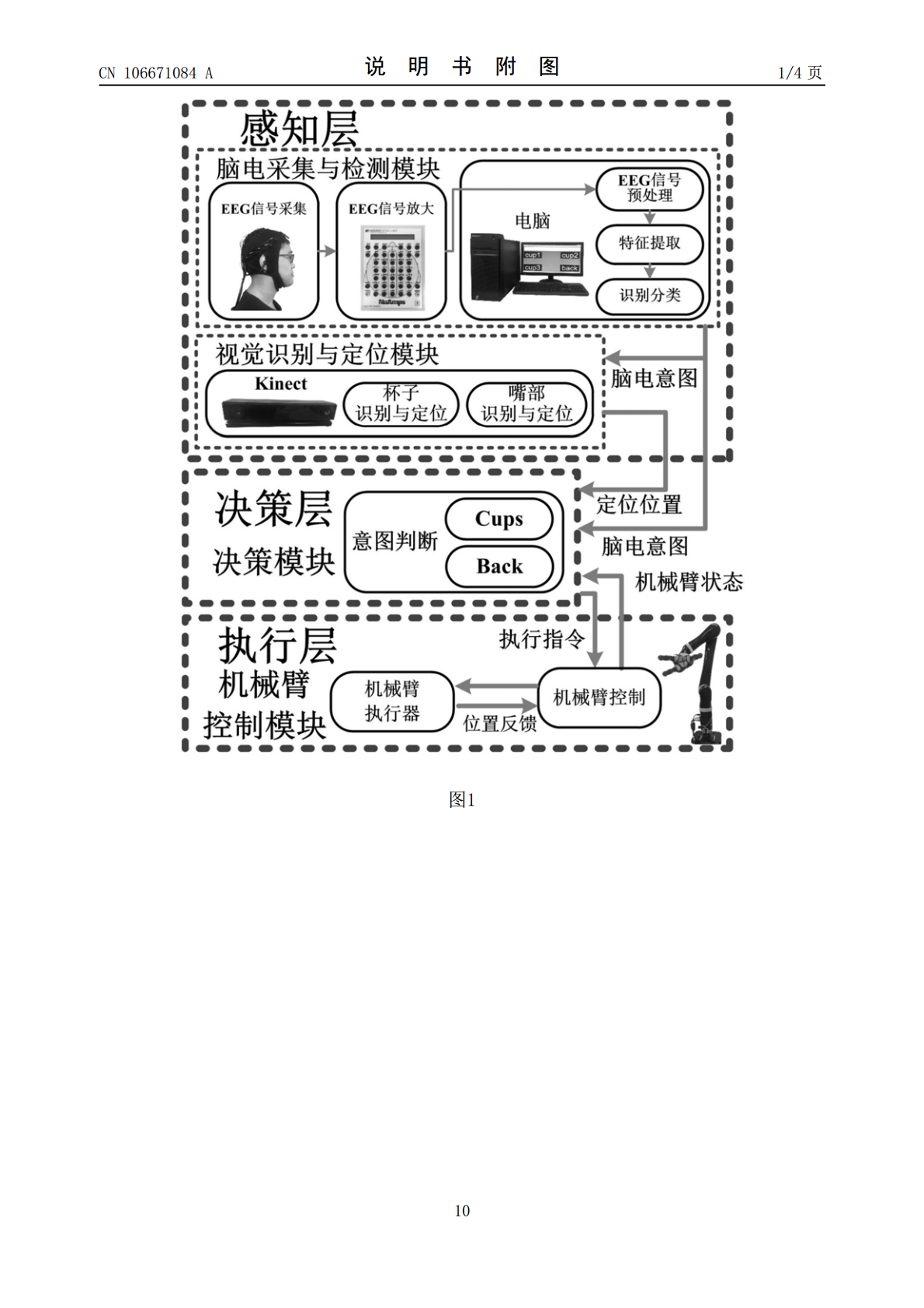
本发明公开了一种基于脑机接口的机械臂自主辅助系统及方法,所述系统包括感知层、决策层和执行层,感知层包括脑电采集与检测模块和视觉识别与定位模块,用于分析识别出用户意图,并用于根据用户意图识别与定位出相应的杯子及用户嘴部的位置;执行层包括机械臂控制模块,根据从决策模块接收来的执行指令,对机械臂进行轨迹规划及控制;决策层包括决策模块,用于连接脑电采集与检测模块、视觉识别与定位模块和机械臂控制模块,实现脑电信号、定位位置及机械臂状态数据的采集和传输,机械臂执行指令的发送。本发明将视觉识别与定位技术、脑机接口和机械
基于脑机接口的机械臂轨迹规划方法、装置以及电子设备.pdf
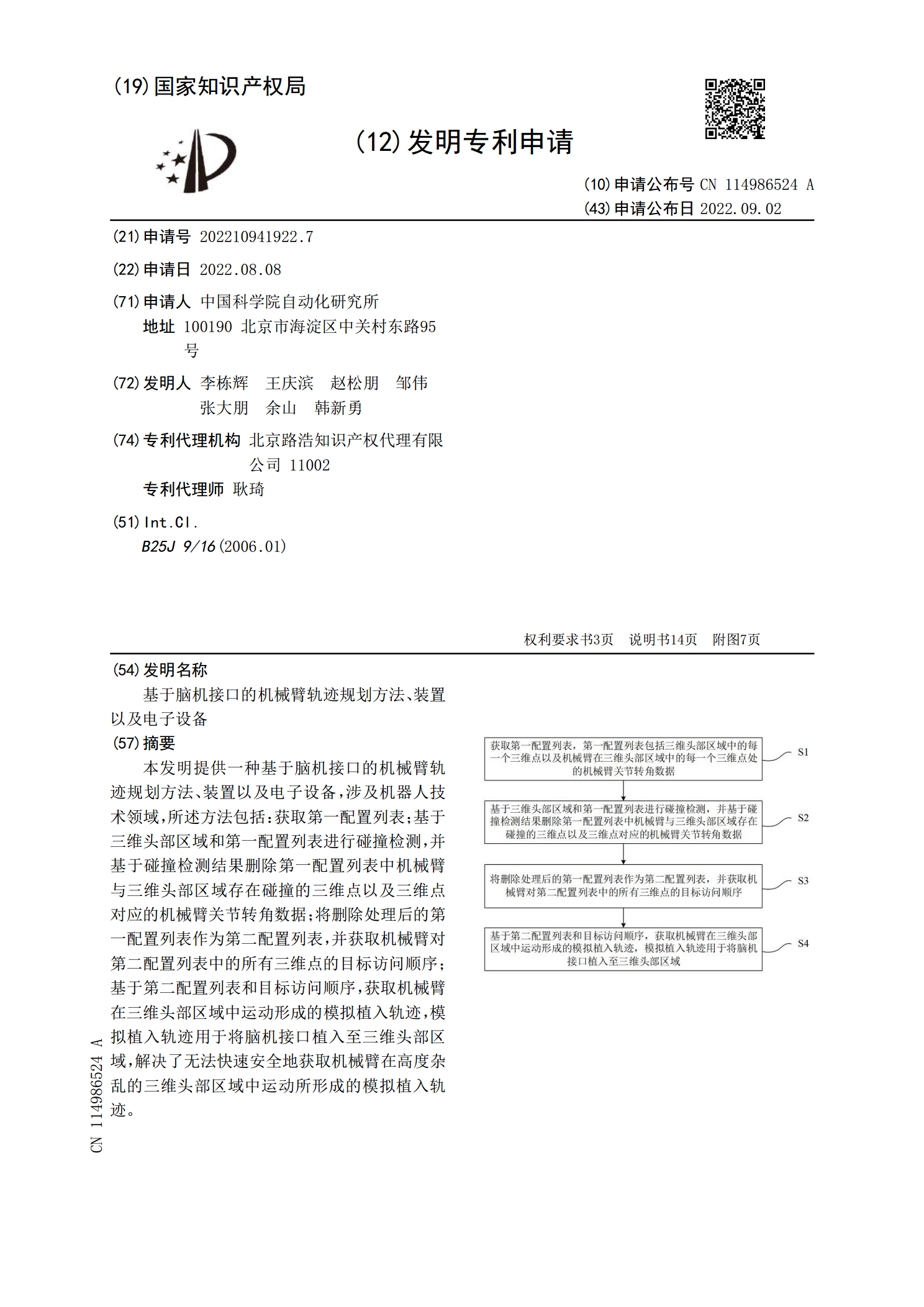
本发明提供一种基于脑机接口的机械臂轨迹规划方法、装置以及电子设备,涉及机器人技术领域,所述方法包括:获取第一配置列表;基于三维头部区域和第一配置列表进行碰撞检测,并基于碰撞检测结果删除第一配置列表中机械臂与三维头部区域存在碰撞的三维点以及三维点对应的机械臂关节转角数据;将删除处理后的第一配置列表作为第二配置列表,并获取机械臂对第二配置列表中的所有三维点的目标访问顺序;基于第二配置列表和目标访问顺序,获取机械臂在三维头部区域中运动形成的模拟植入轨迹,模拟植入轨迹用于将脑机接口植入至三维头部区域,解决了无法快

基于SSVEP脑机接口的残疾人出行辅助系统.docx
基于SSVEP脑机接口的残疾人出行辅助系统基于SSVEP脑机接口的残疾人出行辅助系统摘要:脑机接口技术(Brain-ComputerInterface,BCI)是一种将人的意图或思维通过解析大脑信号转化为计算机指令的技术,已经广泛应用于医疗、辅助工具和人机交互等领域。针对残疾人群体的出行需求,本文提出一种基于SSVEP(Steady-StateVisuallyEvokedPotential)脑机接口的残疾人出行辅助系统,通过对大脑的SSVEP信号进行实时解析,实现了对电动轮椅或其他辅助设备的远程控制,并通

基于增强现实脑机接口和计算机视觉的机械臂控制系统.pptx
基于增强现实脑机接口和计算机视觉的机械臂控制系统01添加章节标题增强现实脑机接口技术增强现实技术的原理和作用脑机接口技术的原理和作用增强现实脑机接口技术的结合方式增强现实脑机接口技术在机械臂控制系统中的应用计算机视觉技术计算机视觉技术的原理和作用计算机视觉在机械臂控制系统中的应用图像识别和目标跟踪的实现方式计算机视觉技术在机械臂控制系统中的优势和挑战机械臂控制系统机械臂控制系统的基本结构和原理基于增强现实脑机接口和计算机视觉的机械臂控制系统的实现方式机械臂控制系统的应用场景和优势机械臂控制系统的未来发展方

基于脑电信号的脑机接口的检测方法、系统、介质及设备.pdf
本发明提供一种基于脑电信号的脑机接口的检测方法、系统、介质及设备,所述基于脑电信号的脑机接口的检测方法包括:获取原始脑电信号;所述原始脑电信号为用户在注视不同频率下刺激目标所产生的信号;对所述原始脑电信号进行所有刺激目标频率发的对应倍频的循环移位处理,以获取循环移位后的信号;计算不同频率刺激下循环移位后的信号的短时自相关函数;根据短时自相关函数,确定用户正在注视频率对应的倍频。本发明有效利用了SSVEP信号的周期性,利用自相关函数检测SSVEP信号的周期成功实现了对SSVEP信号的盲检测,具有更高的短时识