
一种基于无人机避障的寻址系统及方法.pdf

飞舟****文章

1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于无人机避障的寻址系统及方法.pdf
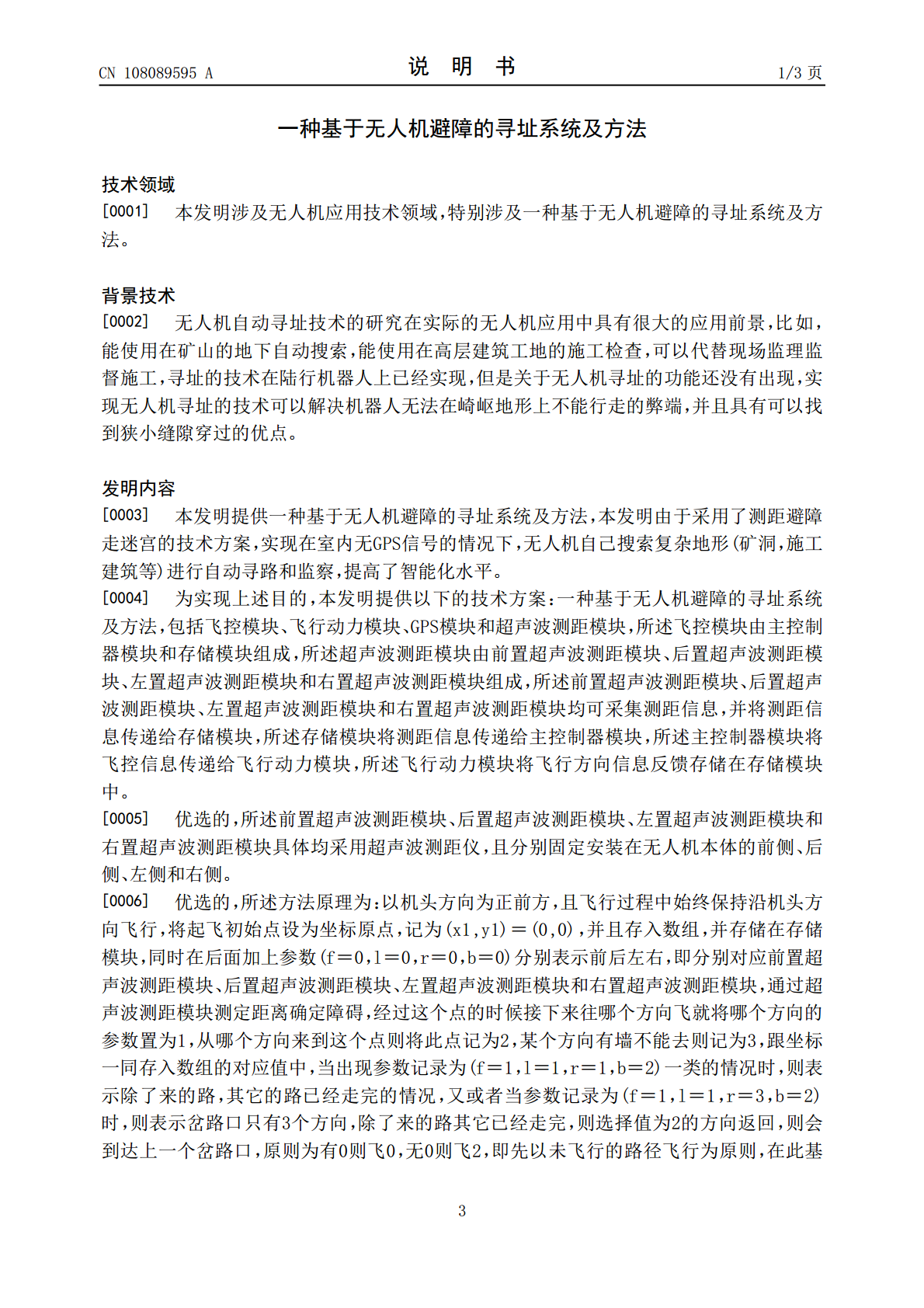
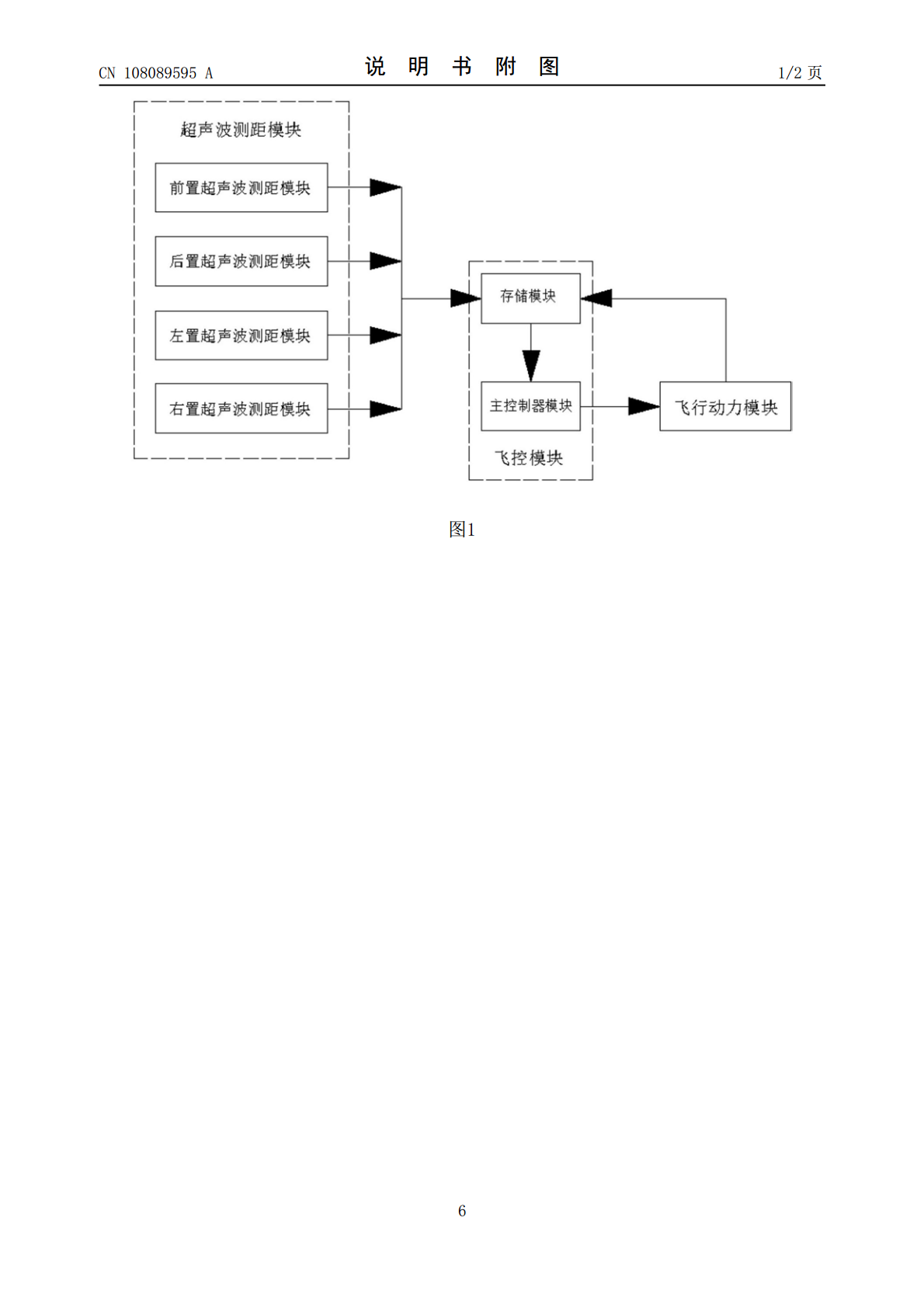
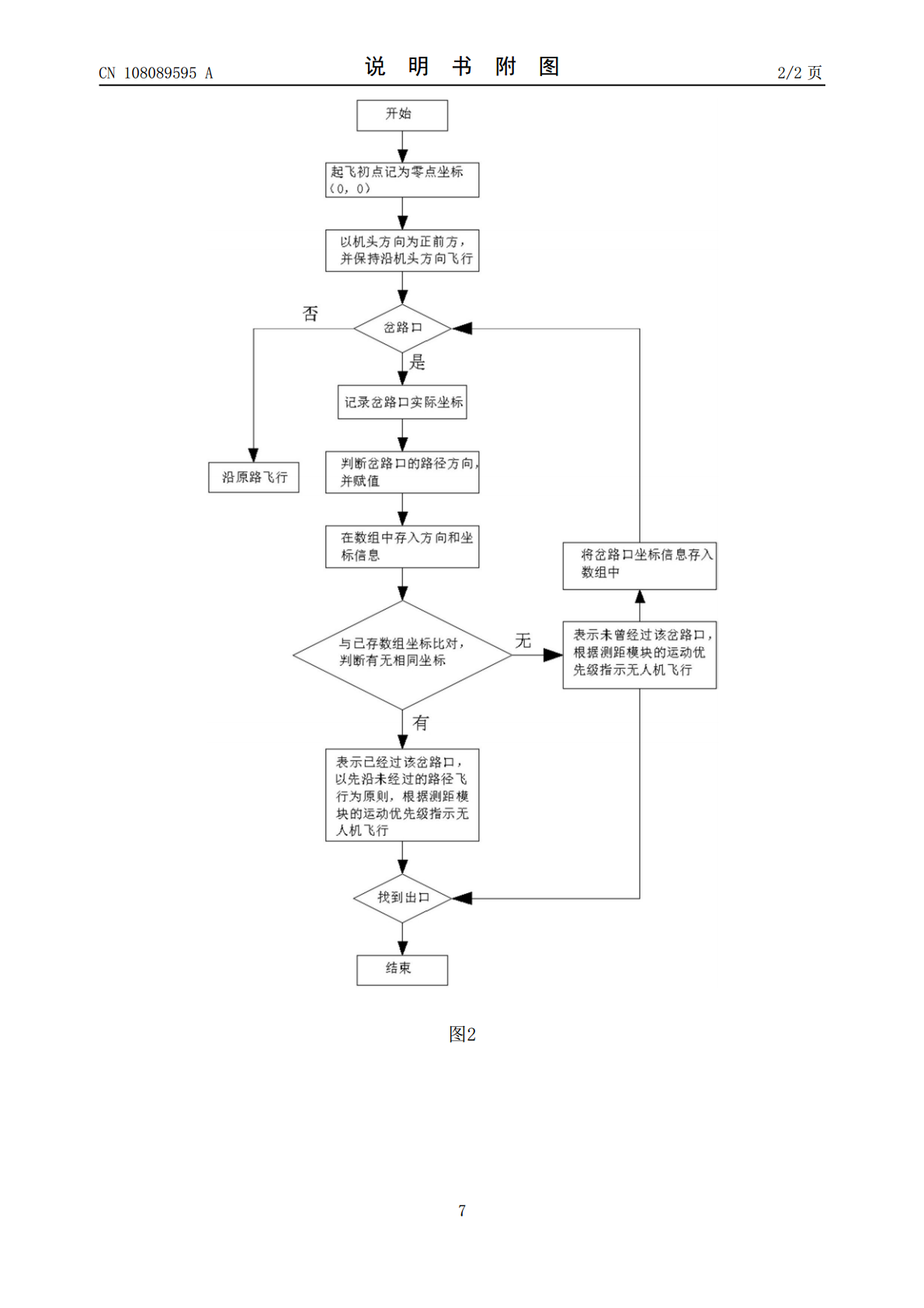
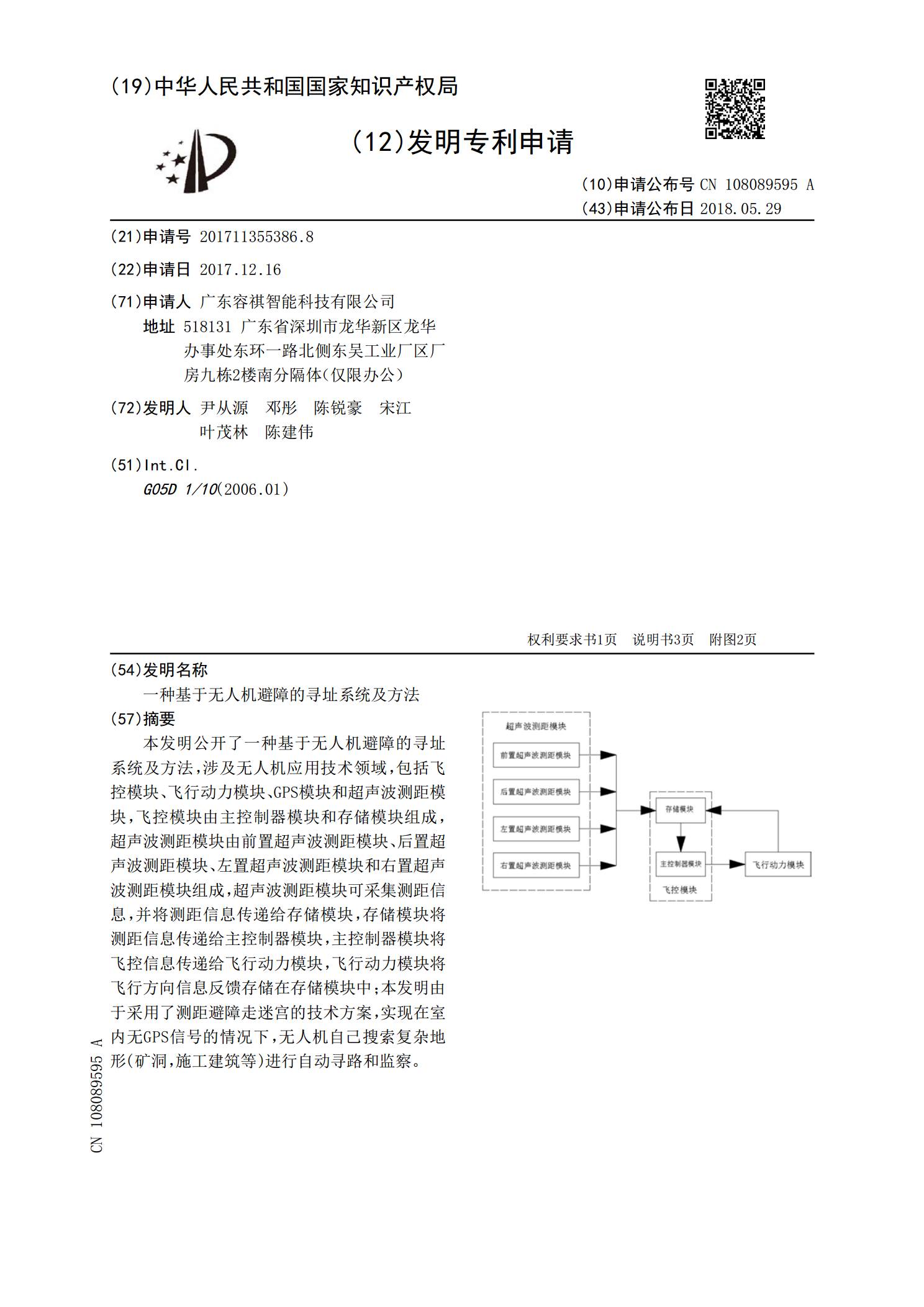
本发明公开了一种基于无人机避障的寻址系统及方法,涉及无人机应用技术领域,包括飞控模块、飞行动力模块、GPS模块和超声波测距模块,飞控模块由主控制器模块和存储模块组成,超声波测距模块由前置超声波测距模块、后置超声波测距模块、左置超声波测距模块和右置超声波测距模块组成,超声波测距模块可采集测距信息,并将测距信息传递给存储模块,存储模块将测距信息传递给主控制器模块,主控制器模块将飞控信息传递给飞行动力模块,飞行动力模块将飞行方向信息反馈存储在存储模块中;本发明由于采用了测距避障走迷宫的技术方案,实现在室内无GP
一种无人机避障系统及避障方法.pdf
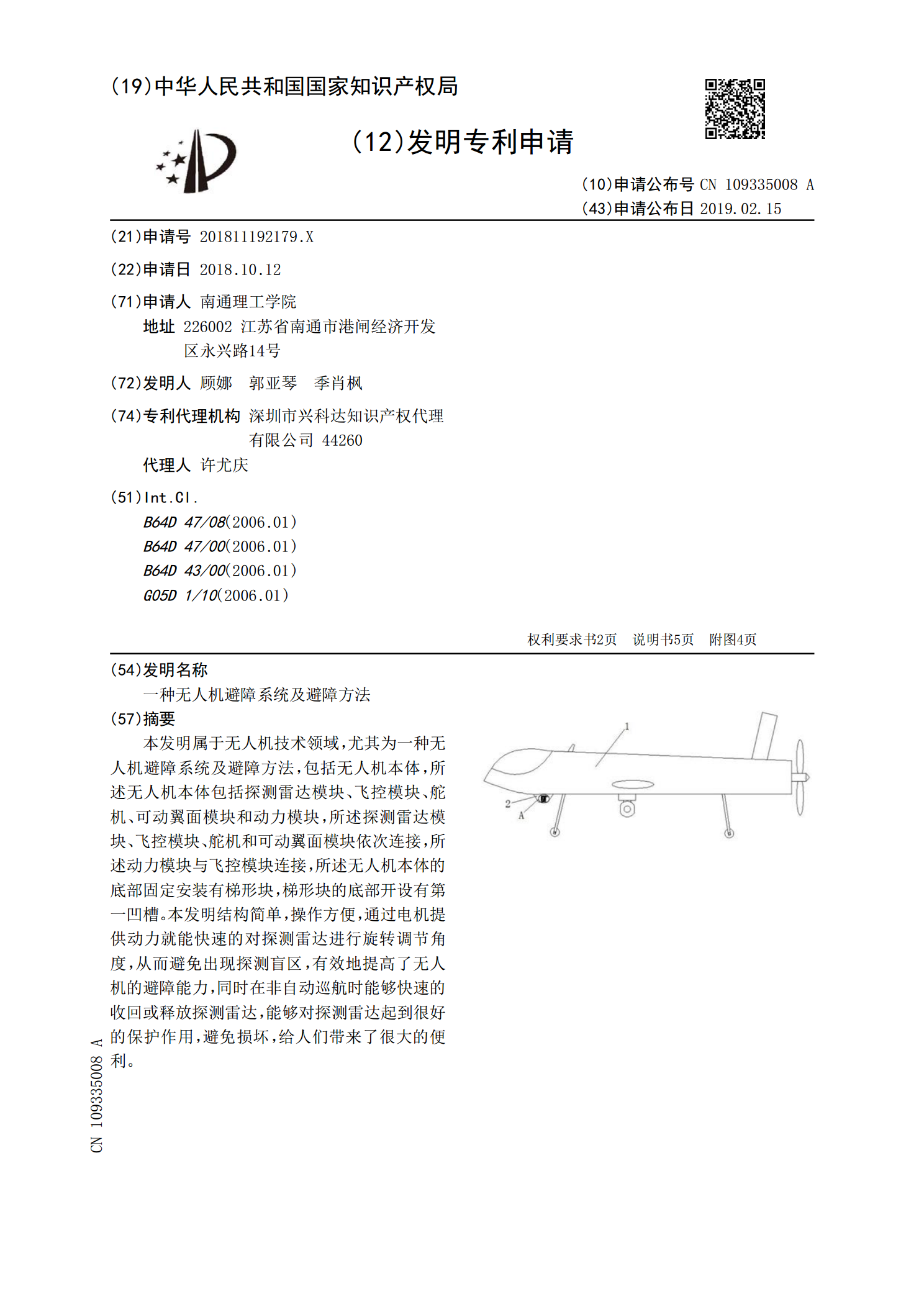
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
无人机避障方法及系统、无人机集群避障方法及系统.pdf
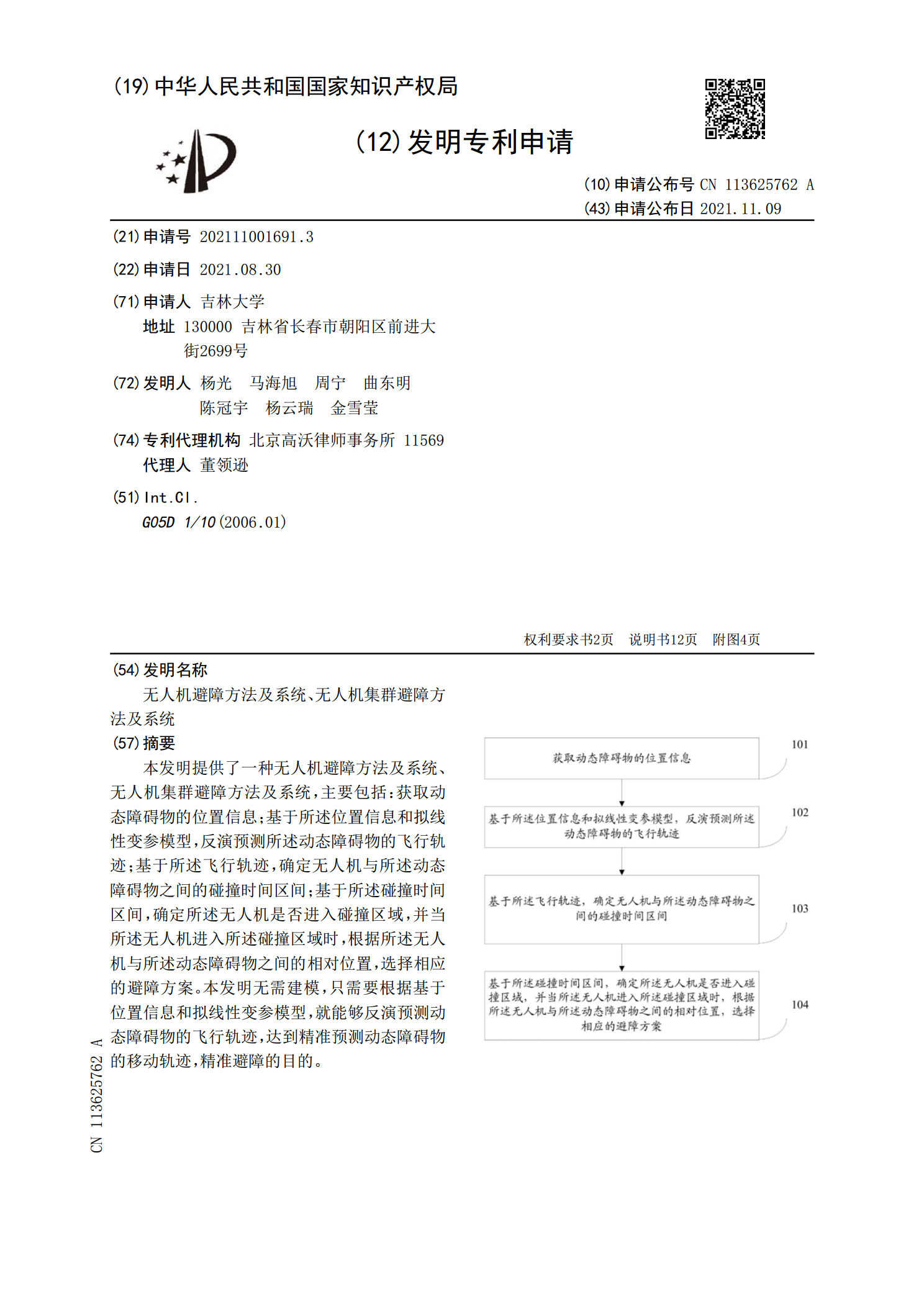
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹

基于无人机的防撞避障系统.pdf
本实用新型提供的基于无人机的防撞避障系统,线性调频源提供非对称三角波作为发射信号,有效减小接收链路的系统带宽,提高接收链路的灵敏度,降低接收链路的噪声系数,平衡混频器产生的差拍信号经中频放大后由FFT数字处理器转换到频域进行分析,能避免时域混叠,模值器对数据进行求模处理,提高数据处理速度,非相参积累器对各个信号幅度进行非相参积累,提高弱信号的信噪比,恒虚警检测器在混有杂波干扰的目标信号中以最大概率检测出障碍物的距离信号,提高准确率,本实用新型从信号源的发射到差拍信号的处理均进行了优化,为无人机提供准确的与
一种避障系统及避障方法.pdf
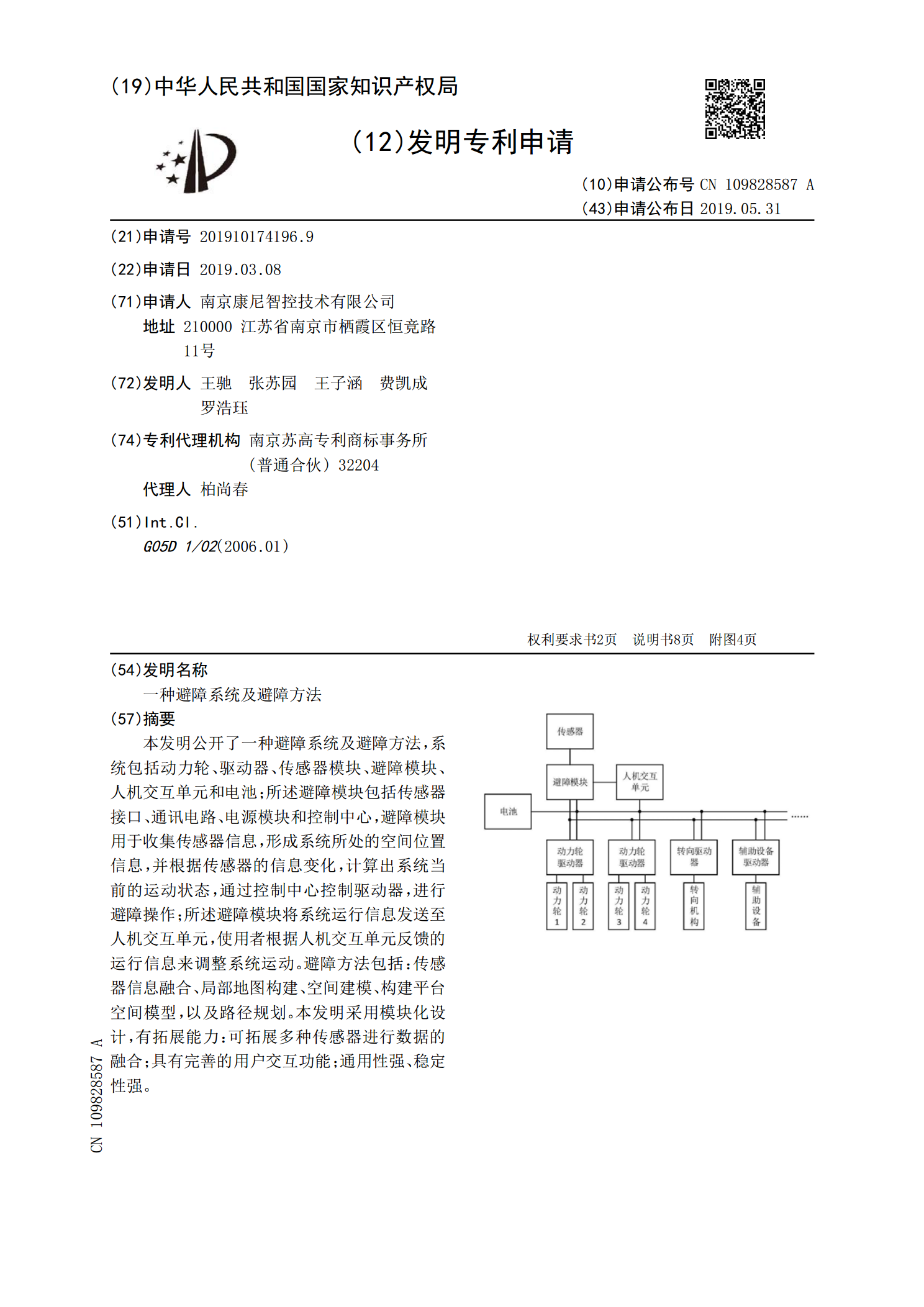
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,