
一种迷你弹跳机器人及其弹跳方法.pdf

Th****s3

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种迷你弹跳机器人及其弹跳方法.pdf
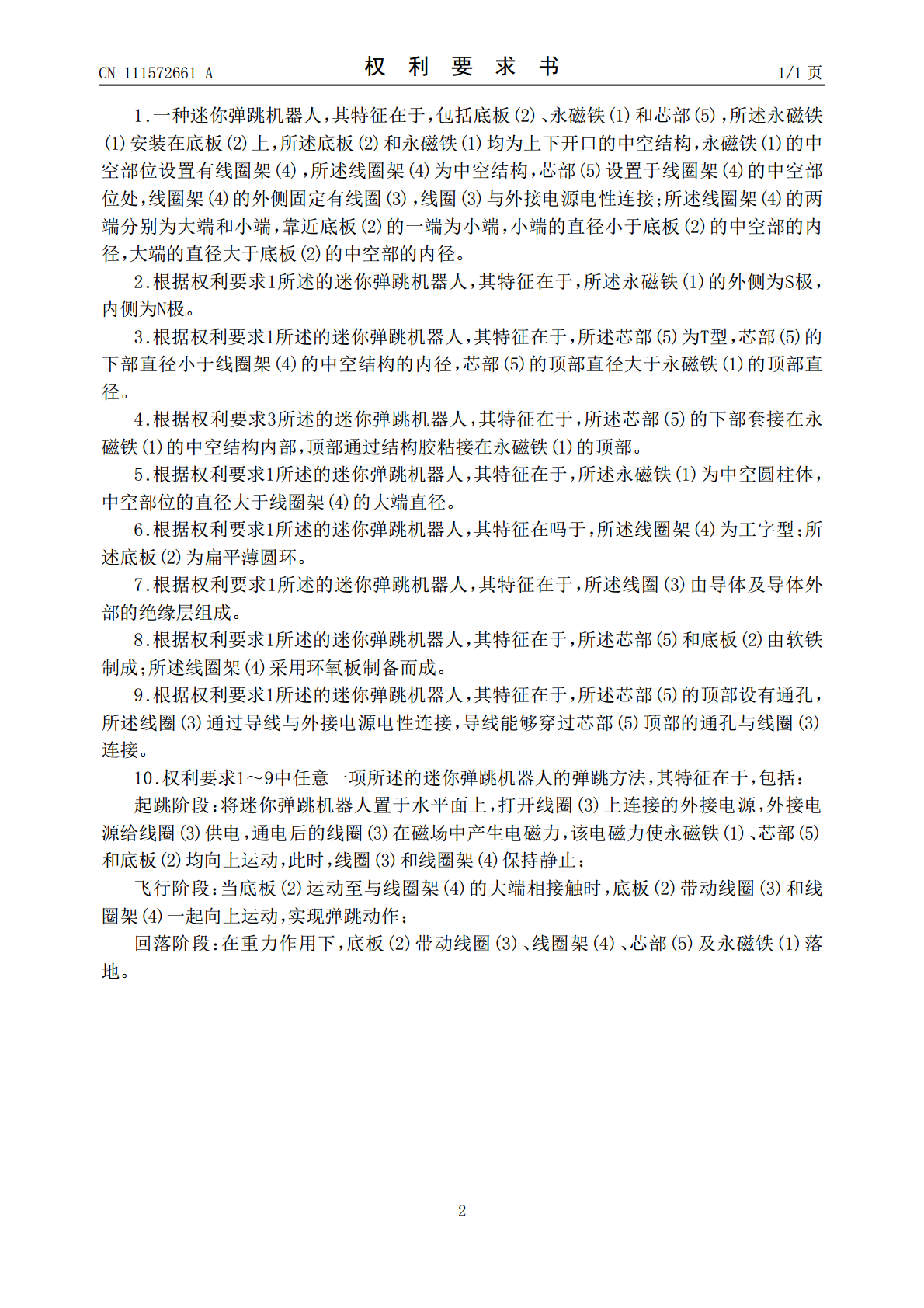
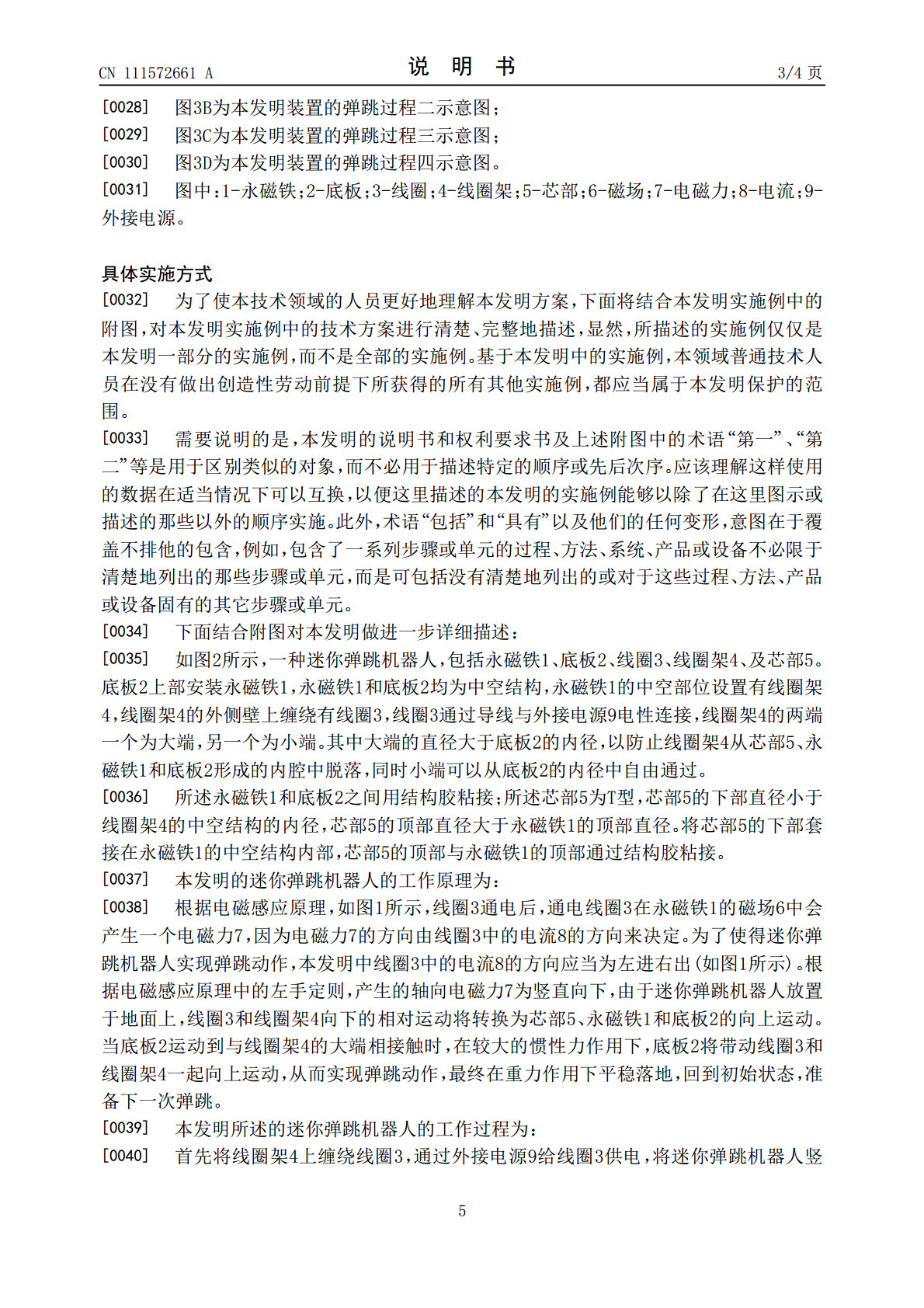
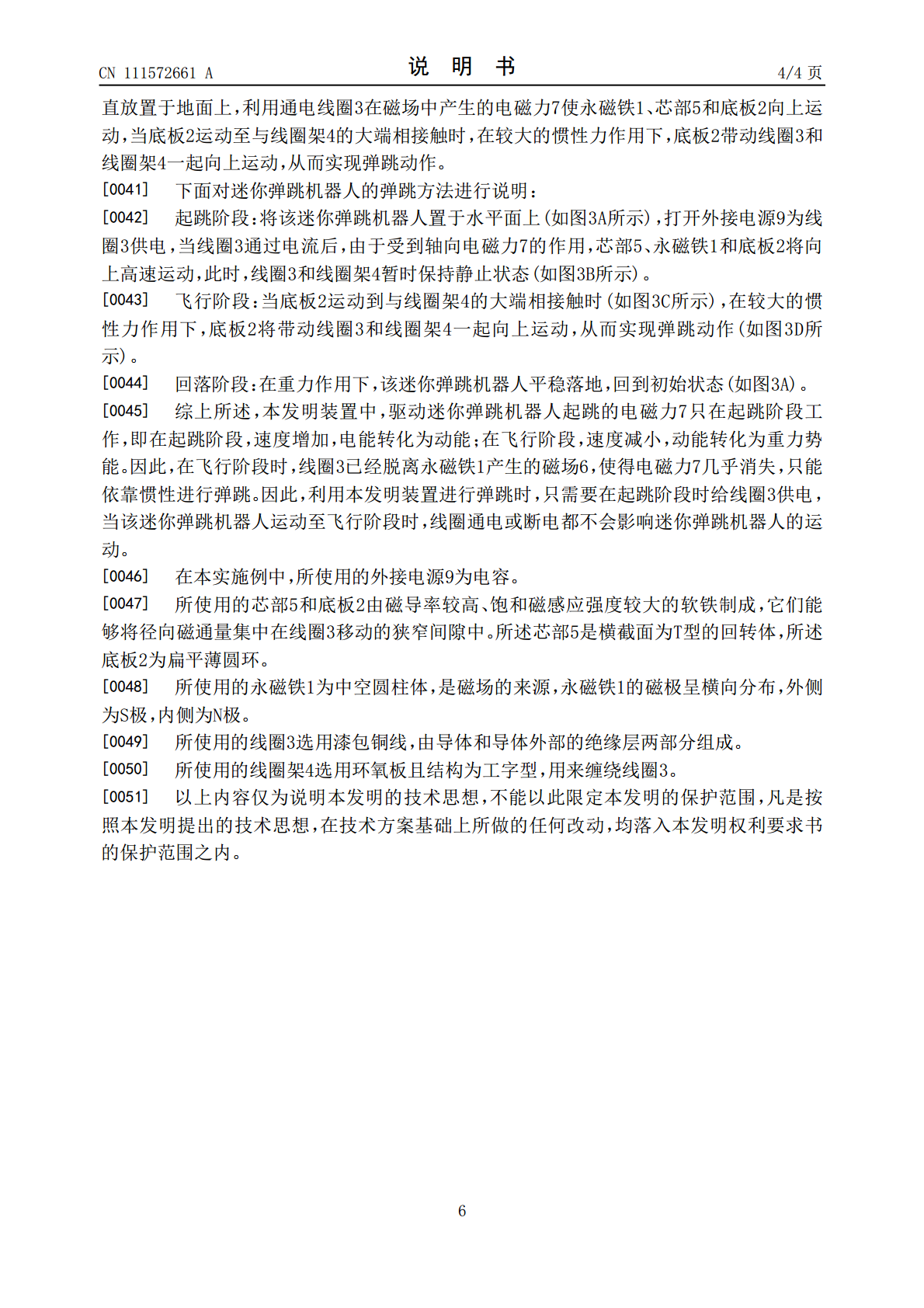
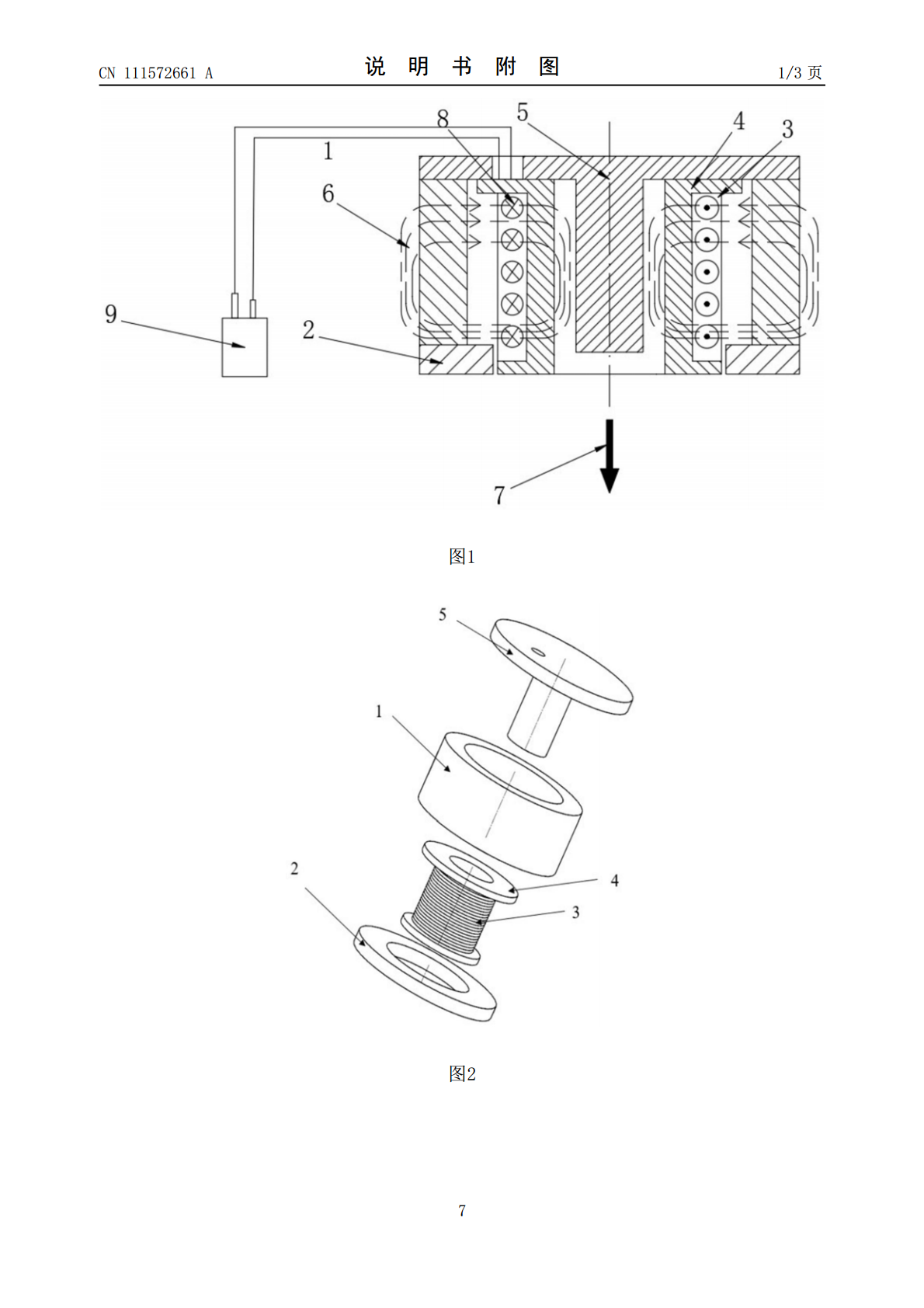
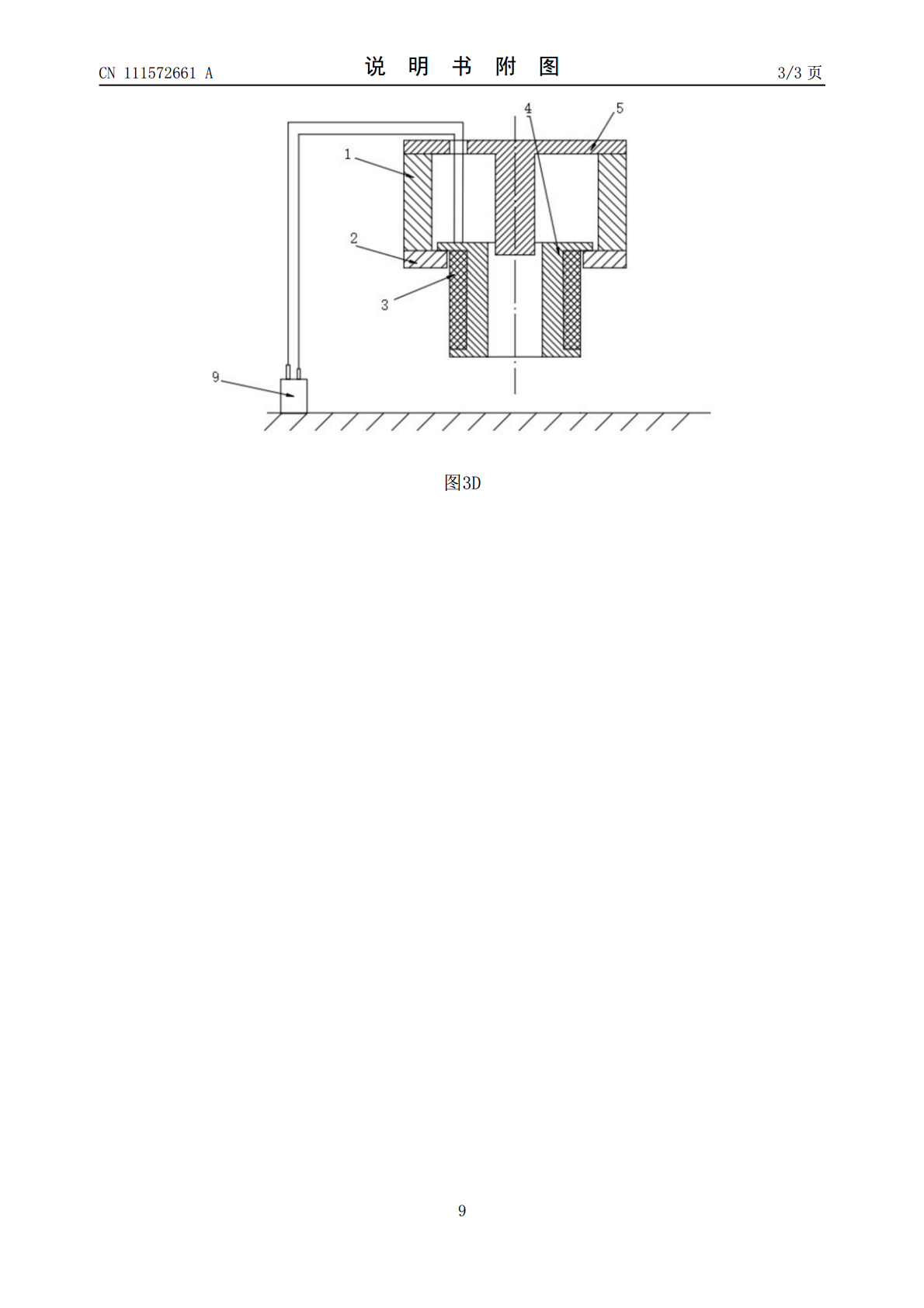
本发明公开了一种迷你弹跳机器人及其弹跳方法,属于机器人技术领域,包括底板、永磁铁和芯部,底板和永磁铁均为中空结构,能够使线圈架在中空结构中上下运动,同时,线圈架的两端直径不同,使得线圈架不会脱离至底板之外,线圈架外部缠绕有线圈,线圈架的中空结构内设置有芯部。本发明易于微型化,易于组装成紧凑的结构;易于控制,可通过控制电压的大小来调整跳跃高度,本发明的弹跳方法响应速度快,易于实现。

一种机器人弹跳装置及其弹跳方法.pdf
一种机器人弹跳装置及其弹跳方法,包括弹跳驱动机构、弹跳机构和机身,所述的弹跳驱动机构包括微型减速电机、电机架、减速齿轮组及传动轴组、固定架组、小齿轮、传动轴及钢丝绳;所述的弹跳机构包括上对称齿轮及固定件、下对称齿轮及固定件、弹跳上杆、弹跳下杆、拉簧和/或扭簧,以及弹跳底板。本发明采用改进的六杆式机构加装拉簧和扭簧,通过调节拉簧和扭簧的数量可实现多个级别的储能,解决了传统的六杆弹跳结构中六杆弹簧储能机构单纯依靠拉伸弹簧需要较大空间的问题,便于机器人的小型化,在相同的机构纵向运动位移量下其储能更高,并且具有较

一种弹跳扑翼机器人及其弹跳扑翼方法.pdf
本发明公开了一种弹跳扑翼机器人及其弹跳扑翼方法.自然界中一些小型昆虫,如蟋蟀,蚱蜢等,用腿部肌肉起跳,在空中用翅膀调整姿态,增强了起跳和落地阶段的稳定性。本发明一种弹跳扑翼机器人,包括机架、弹跳机构、复用驱动机构和扑翼机构。弹跳机构包括四根传动绳和四根弹腿。扑翼机构包括扑翼架、扑翼输入轴、扑翼输入齿轮、第一中间齿轮、第二中间齿轮、第三中间齿轮、扑翼输出齿轮和单侧扑翼组件。复用驱动机构包括弹跳传动组件、扑翼传动组件、动力源组件和传动切换组件。本发明仅使用一个电机驱动就能够完成对弹跳动作和扑翼动作的驱动,有效
一种机器人弹跳机构及其工作方法.pdf
本发明涉及一种机器人弹跳机构及其工作方法。本发明所述机器人弹跳机构,利用弹簧片储能,实现弹簧片的缓慢卷起和突然释放,通过板簧片敲打地面获得反作用力以完成弹跳运动。本发明所述机器人弹跳机构,可实现有目的的弹跳运动,行程长短可控,过程中通过棘轮棘爪结构辅助弹簧片储能,安全可靠,而且释放过程可通过电机控制实现随之停止,便于其扩展应用于建筑工地用卷扬机等场合。

弹跳机器人腿以及弹跳机器人.pdf
本发明公开了一种弹跳机器人腿,通过在六边形结构的底杆下方安装行走轮,并且行走轮可以利用第二电机转向,从而在腿部增加转向结构,使弹跳机器人的腿部可完成转向动作,有利于简化整体结构,这样的弹跳机器人腿包括跳跃、转向、轮式结构,可满足多种工况下的行走,可进行跳跃,快速移动和狭小空间原地转动等多种动作。并且,采用六连杆加弹簧作为弹跳结构,一方面腿部结构的稳定性可靠,另一方面弹簧能量利用率高。再则,利用拉索拉动弹簧蓄能,使弹跳的灵活性更高,响应及时迅速。并利用该弹跳机器人腿提供了一种可满足多种工况下行走、可进行跳跃