
弹跳机器人腿以及弹跳机器人.pdf

是你****韵呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

弹跳机器人腿以及弹跳机器人.pdf
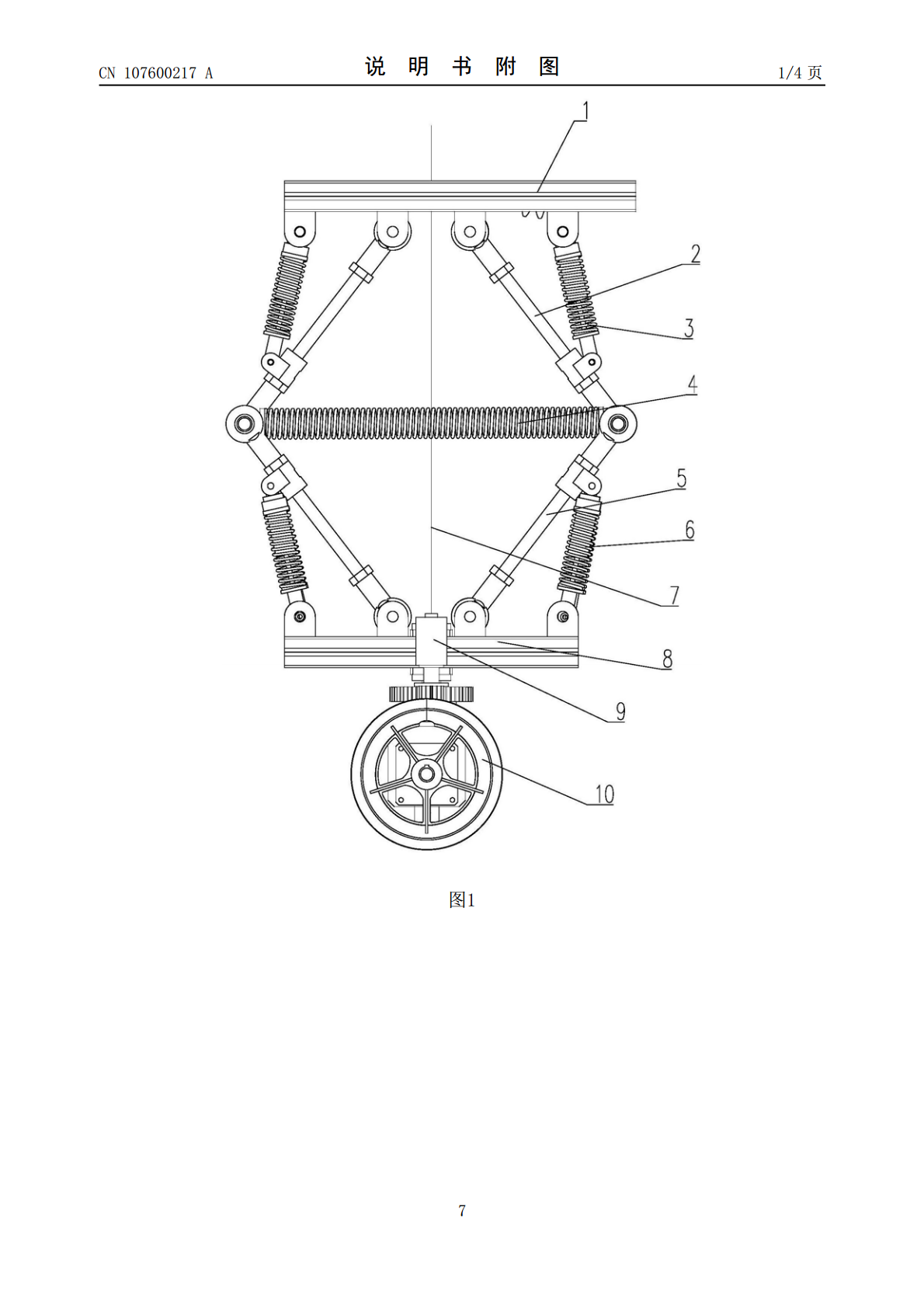
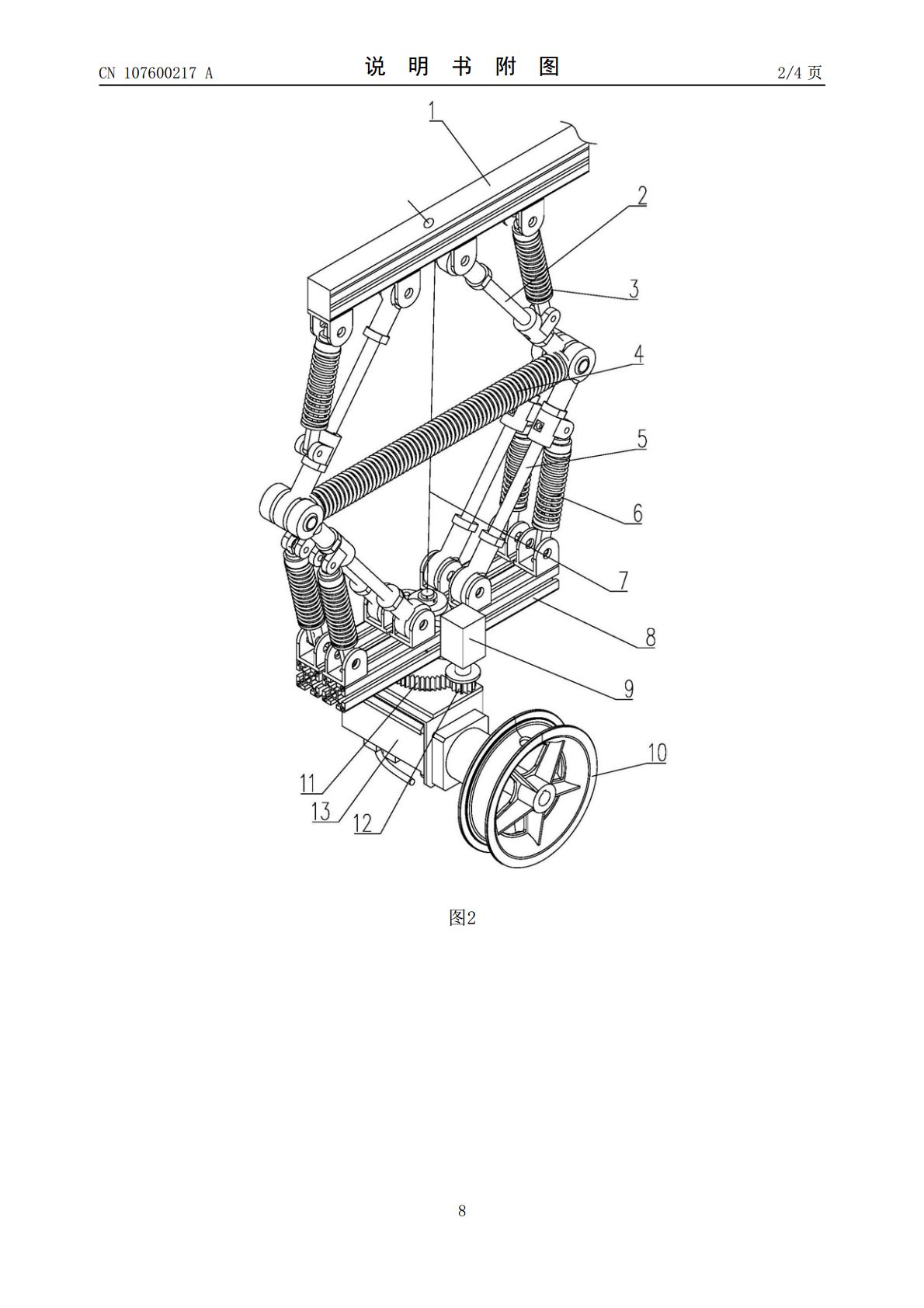
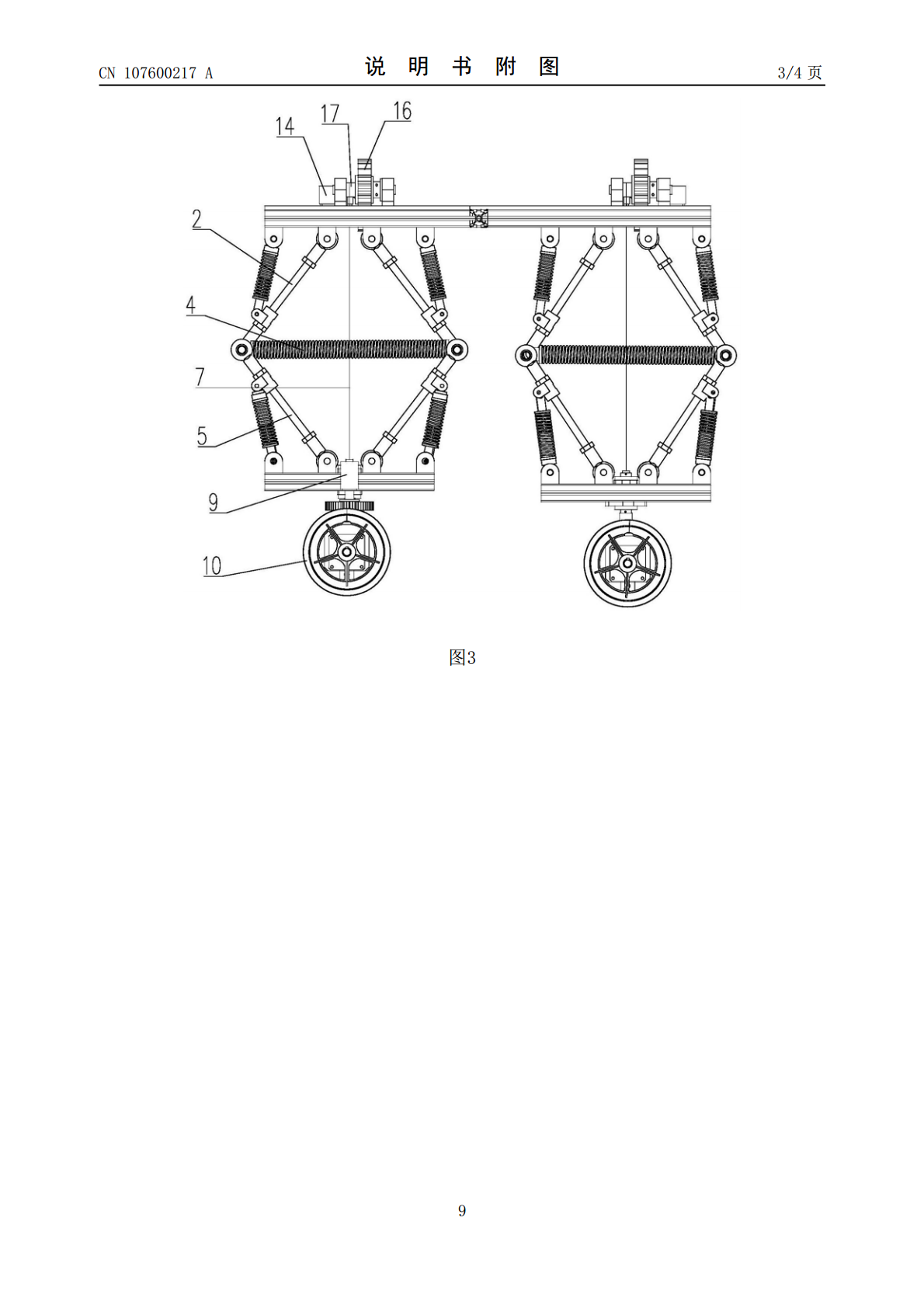
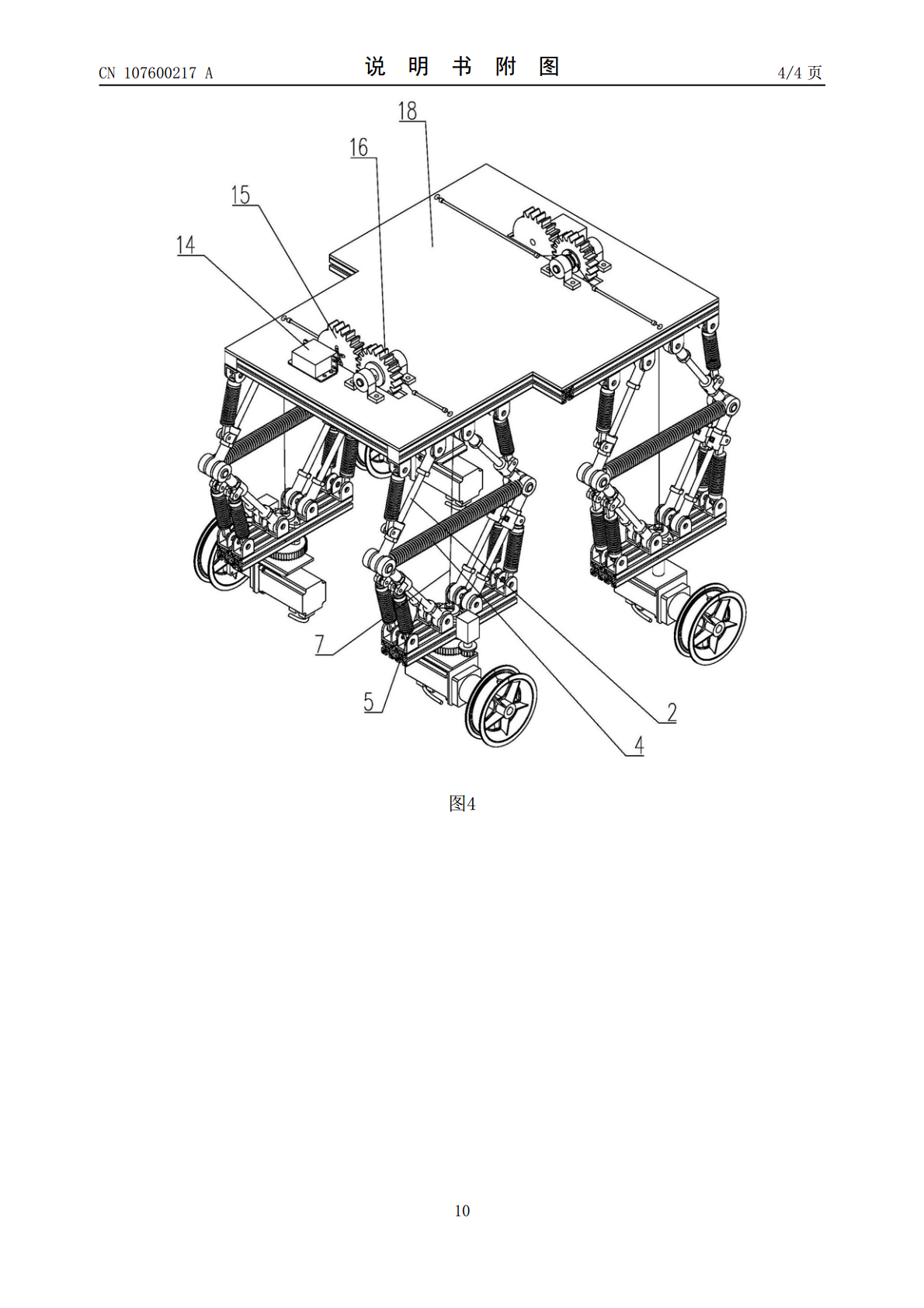
本发明公开了一种弹跳机器人腿,通过在六边形结构的底杆下方安装行走轮,并且行走轮可以利用第二电机转向,从而在腿部增加转向结构,使弹跳机器人的腿部可完成转向动作,有利于简化整体结构,这样的弹跳机器人腿包括跳跃、转向、轮式结构,可满足多种工况下的行走,可进行跳跃,快速移动和狭小空间原地转动等多种动作。并且,采用六连杆加弹簧作为弹跳结构,一方面腿部结构的稳定性可靠,另一方面弹簧能量利用率高。再则,利用拉索拉动弹簧蓄能,使弹跳的灵活性更高,响应及时迅速。并利用该弹跳机器人腿提供了一种可满足多种工况下行走、可进行跳跃

弹跳机器人弹跳机构的设计与仿真分析.docx
弹跳机器人弹跳机构的设计与仿真分析标题:弹跳机器人弹跳机构的设计与仿真分析摘要:弹跳机器人作为一种新兴的机器人技术,在各个领域具有广泛的应用前景。其中,弹跳机构被视为弹跳机器人的关键部件,其设计和仿真分析的优化对于提高弹跳机器人的性能至关重要。本文结合弹跳机器人的概述和目前的研究进展,探讨了弹跳机构的设计原理和仿真分析方法,并给出了一些实际应用中常见的设计和仿真案例。第一节:弹跳机器人的概述1.1弹跳机器人的定义和分类1.2弹跳机器人的应用领域1.3弹跳机构的重要性与挑战第二节:弹跳机构的设计原理2.1弹

一种机器人弹跳装置及其弹跳方法.pdf
一种机器人弹跳装置及其弹跳方法,包括弹跳驱动机构、弹跳机构和机身,所述的弹跳驱动机构包括微型减速电机、电机架、减速齿轮组及传动轴组、固定架组、小齿轮、传动轴及钢丝绳;所述的弹跳机构包括上对称齿轮及固定件、下对称齿轮及固定件、弹跳上杆、弹跳下杆、拉簧和/或扭簧,以及弹跳底板。本发明采用改进的六杆式机构加装拉簧和扭簧,通过调节拉簧和扭簧的数量可实现多个级别的储能,解决了传统的六杆弹跳结构中六杆弹簧储能机构单纯依靠拉伸弹簧需要较大空间的问题,便于机器人的小型化,在相同的机构纵向运动位移量下其储能更高,并且具有较

仿蝗虫机器人的弹跳腿结构设计与优化.docx
仿蝗虫机器人的弹跳腿结构设计与优化摘要:本研究旨在设计和优化仿蝗虫机器人的弹跳腿结构,可应用于类似于极地探测等环境中。本文介绍了蝗虫跳跃原理及其在机器人设计中的应用,并通过前人研究、仿生学原理和模拟软件分析设计一个可行的弹跳腿结构,并对其进行仿真和优化。结果表明,本文设计的弹跳腿结构能够实现稳定、高效的跳跃动作,具有较强的适应性和鲁棒性,为机器人工程研究提供了新的思路和方法。关键词:仿生学;弹跳腿;蝗虫机器人;极地探测引言:近年来,仿生学在机器人工程领域得到了广泛应用。仿生学通过学习生物体的运动和行为,将
一种迷你弹跳机器人及其弹跳方法.pdf
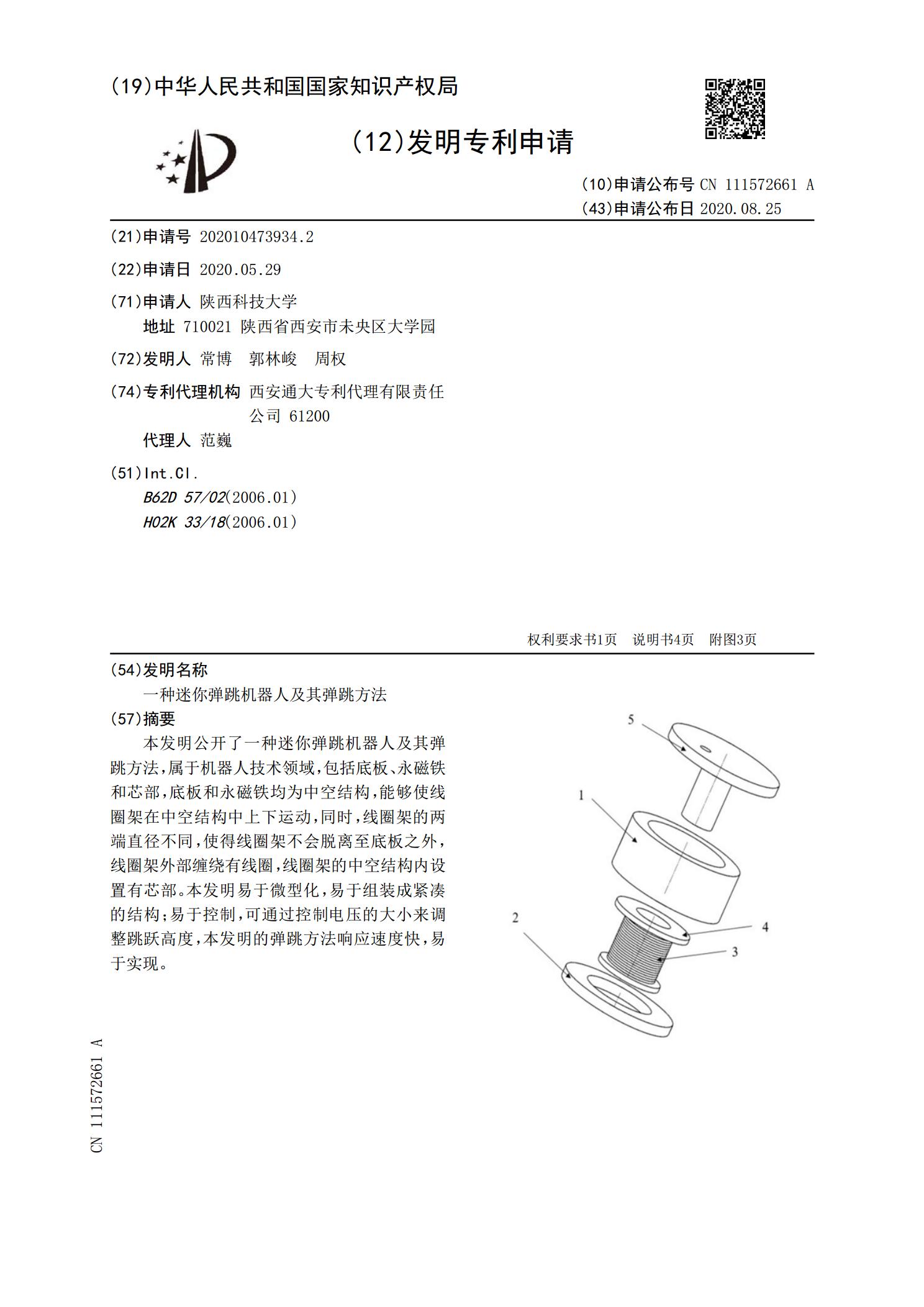
本发明公开了一种迷你弹跳机器人及其弹跳方法,属于机器人技术领域,包括底板、永磁铁和芯部,底板和永磁铁均为中空结构,能够使线圈架在中空结构中上下运动,同时,线圈架的两端直径不同,使得线圈架不会脱离至底板之外,线圈架外部缠绕有线圈,线圈架的中空结构内设置有芯部。本发明易于微型化,易于组装成紧凑的结构;易于控制,可通过控制电压的大小来调整跳跃高度,本发明的弹跳方法响应速度快,易于实现。