
一种弹跳扑翼机器人及其弹跳扑翼方法.pdf

玉环****找我


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种弹跳扑翼机器人及其弹跳扑翼方法.pdf
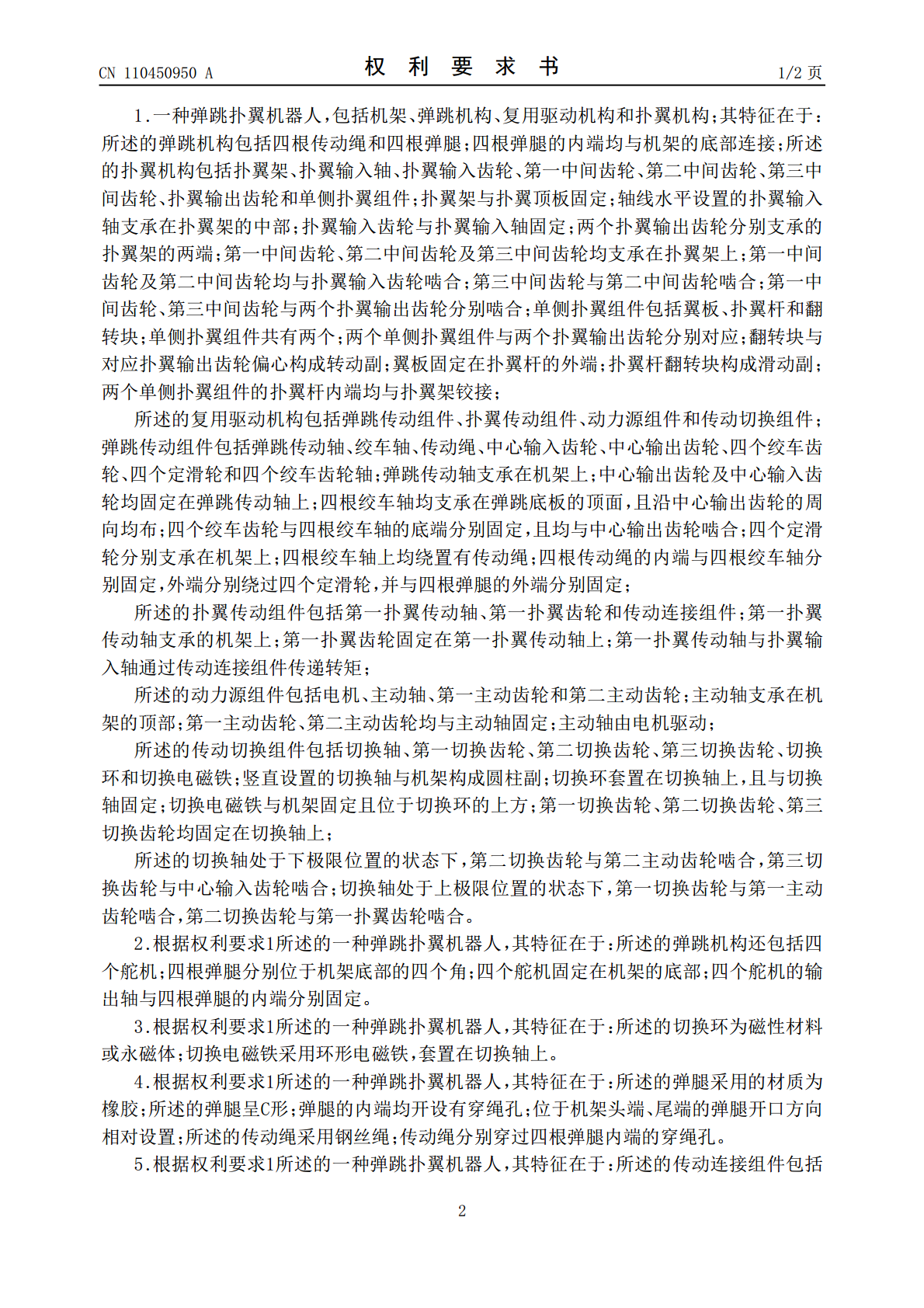
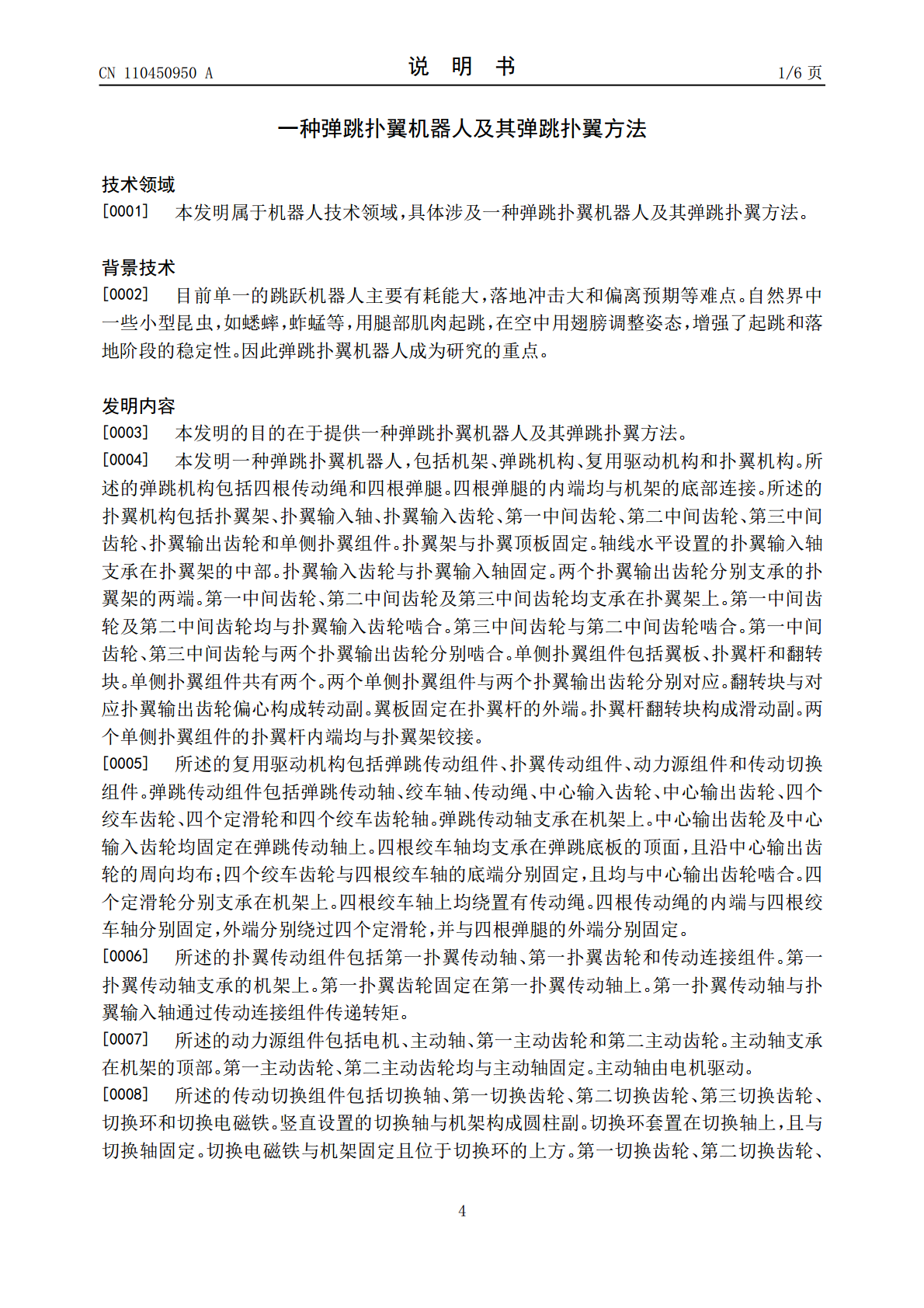
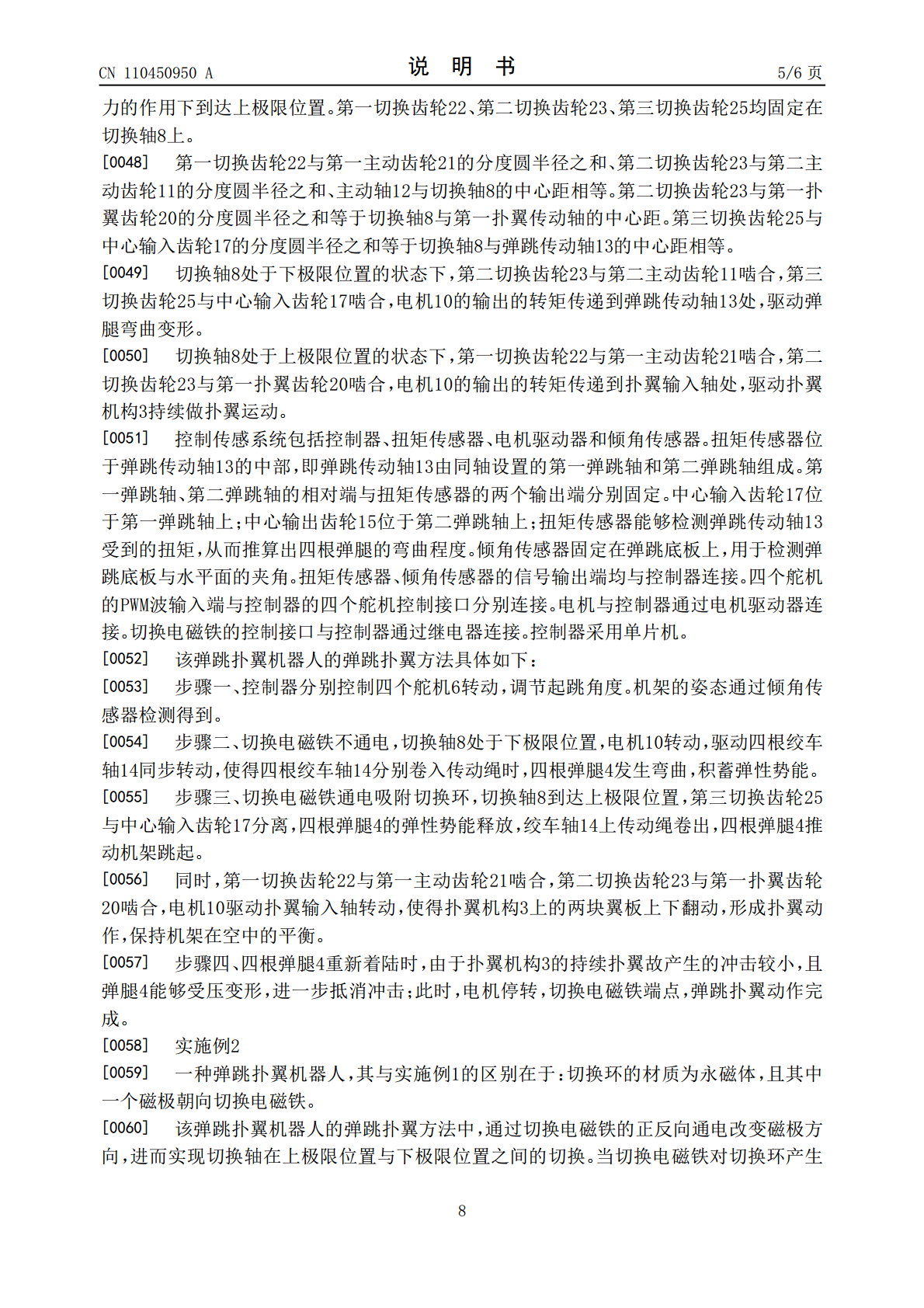
本发明公开了一种弹跳扑翼机器人及其弹跳扑翼方法.自然界中一些小型昆虫,如蟋蟀,蚱蜢等,用腿部肌肉起跳,在空中用翅膀调整姿态,增强了起跳和落地阶段的稳定性。本发明一种弹跳扑翼机器人,包括机架、弹跳机构、复用驱动机构和扑翼机构。弹跳机构包括四根传动绳和四根弹腿。扑翼机构包括扑翼架、扑翼输入轴、扑翼输入齿轮、第一中间齿轮、第二中间齿轮、第三中间齿轮、扑翼输出齿轮和单侧扑翼组件。复用驱动机构包括弹跳传动组件、扑翼传动组件、动力源组件和传动切换组件。本发明仅使用一个电机驱动就能够完成对弹跳动作和扑翼动作的驱动,有效

一种弹跳起飞的微型扑翼飞行器.pdf
一种弹跳起飞的微型扑翼飞行器,包括机身、仿生扑翼、驱动机构、弹跳机构、控制系统和尾翼,所述机身用于固定及安装其余各部件;所述仿生扑翼为凸起式设计且左右对称,其前端连接驱动机构,后端固定于机身末端;所述驱动机构安装于机身前部,通过齿轮传动将微型直流电机的转动转化为仿生扑翼的扑动;所述弹跳装置安装于机身下部,通过其蓄能–触发动作带动实现飞行器自主起飞及平稳降落;所述控制系统安装于机身上腹部,通过导线与驱动机构和弹跳装置相连;所述尾翼安装于机身尾部,保持机体飞行的平衡。该扑翼飞行器可实现自主起飞和平稳降落,并能

扑翼扇面、扑翼机机翼及扑翼机.pdf
本发明涉及飞行器技术领域,尤其是涉及一种扑翼扇面、扑翼机机翼及扑翼机。该扑翼扇面,包括端部桁架、支撑杆和蒙皮,支撑杆的数量为多根,多根支撑杆固定于端部桁架上,且多根支撑杆用于支撑固定蒙皮;多根支撑杆沿端部桁架的长度方向平行间隔分布,且在端部桁架的高度方向上,相邻两根支撑杆上下错位布置。该扑翼机机翼,包括所述的扑翼扇面。该扑翼机,包括所述的扑翼机机翼。本发明增加了扑翼机的推力,有利于增加扑翼机的飞行性能。
一种可切换扑动和滑翔状态的扑翼结构及其扑翼模式切换的方法.pdf
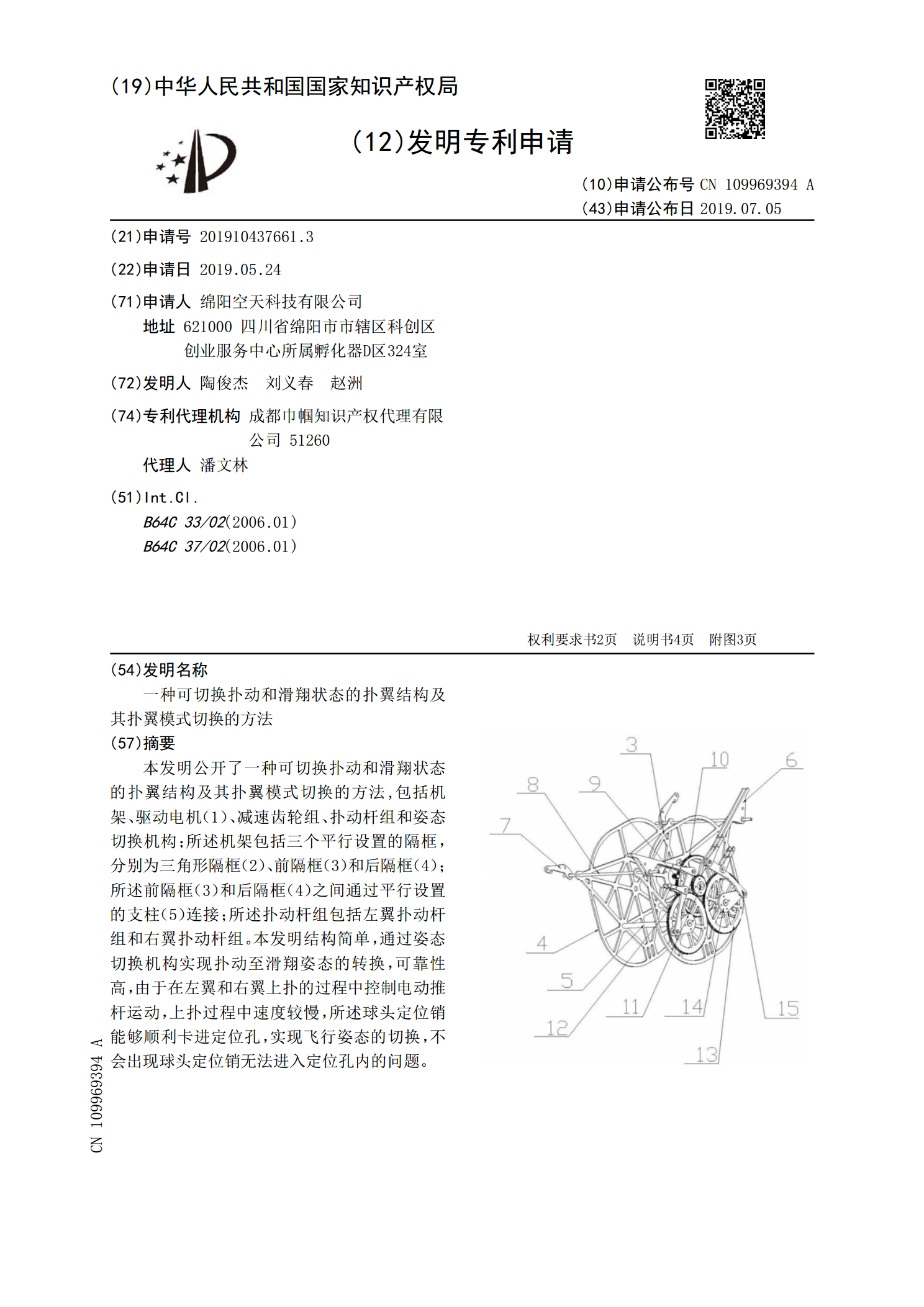
本发明公开了一种可切换扑动和滑翔状态的扑翼结构及其扑翼模式切换的方法,包括机架、驱动电机(1)、减速齿轮组、扑动杆组和姿态切换机构;所述机架包括三个平行设置的隔框,分别为三角形隔框(2)、前隔框(3)和后隔框(4);所述前隔框(3)和后隔框(4)之间通过平行设置的支柱(5)连接;所述扑动杆组包括左翼扑动杆组和右翼扑动杆组。本发明结构简单,通过姿态切换机构实现扑动至滑翔姿态的转换,可靠性高,由于在左翼和右翼上扑的过程中控制电动推杆运动,上扑过程中速度较慢,所述球头定位销能够顺利卡进定位孔,实现飞行姿态的切换

扑翼系统及扑翼机.pdf
本发明实施例提供的扑翼系统及扑翼机,内段翼与机身铰接,连接在机身上的驱动机构与内段翼连接并驱动内段翼扑动;第一翼梁与内段翼铰接,第二翼梁与第二连杆机构铰接;第一连杆机构连接在驱动机构与第一翼梁之间,以通过驱动机构和内段翼驱动第一翼梁扑动;第二连杆机构连接在驱动机构与第二翼梁之间,以通过驱动机构和内段翼驱动第二翼梁扑动;第二翼梁的摆动幅度与第一翼梁的摆动幅度不同;通过设置第二翼梁,并通过第一连杆机构、第二连杆机构将第二翼梁与驱动机构、内段翼连接,实现通过驱动机构和内段翼驱动第二翼梁扑动,同时使得第二翼梁与第