
一种三维模型的渲染方法和系统.pdf

羽沫****魔王


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三维模型的渲染方法和系统.pdf
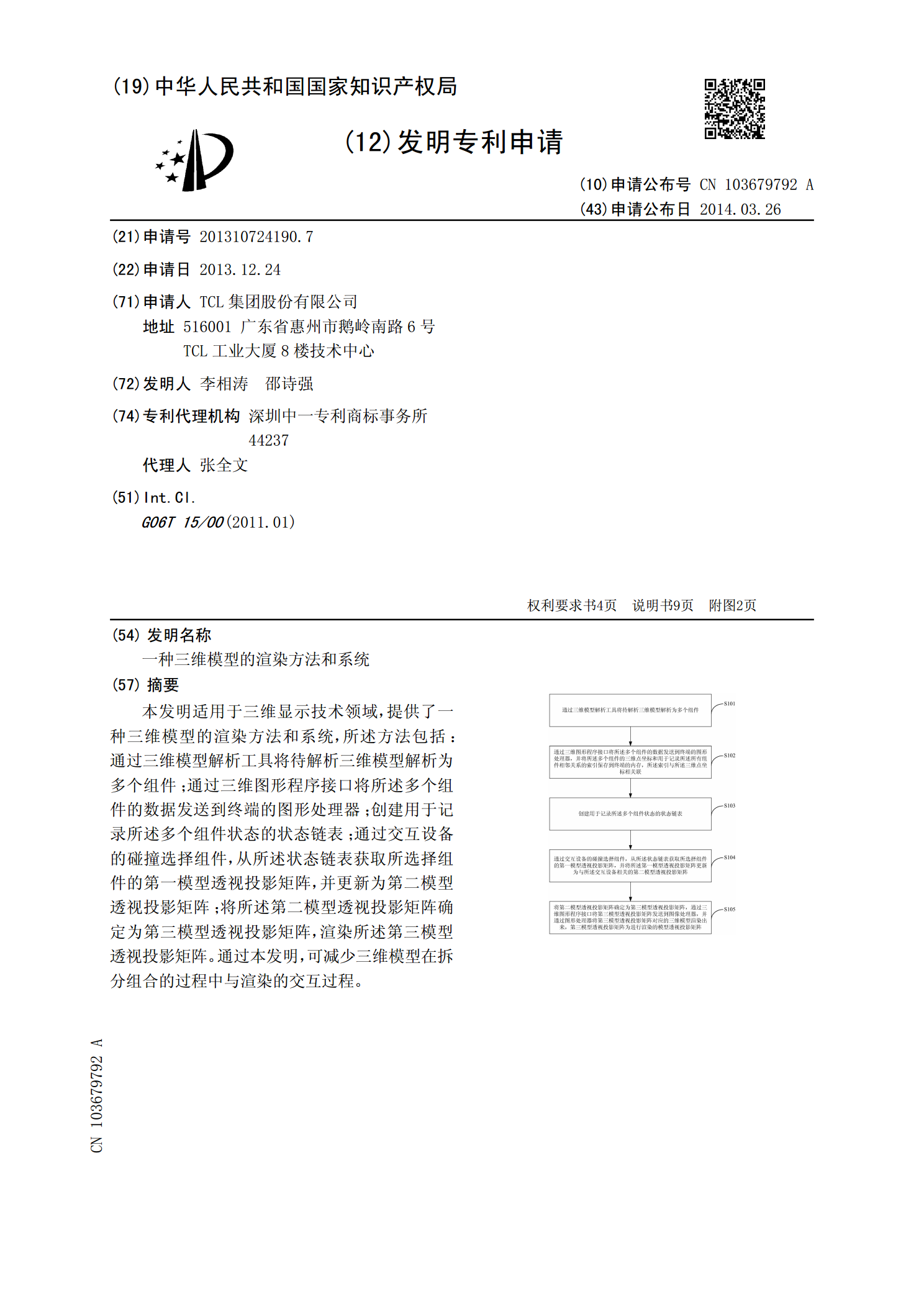
本发明适用于三维显示技术领域,提供了一种三维模型的渲染方法和系统,所述方法包括:通过三维模型解析工具将待解析三维模型解析为多个组件;通过三维图形程序接口将所述多个组件的数据发送到终端的图形处理器;创建用于记录所述多个组件状态的状态链表;通过交互设备的碰撞选择组件,从所述状态链表获取所选择组件的第一模型透视投影矩阵,并更新为第二模型透视投影矩阵;将所述第二模型透视投影矩阵确定为第三模型透视投影矩阵,渲染所述第三模型透视投影矩阵。通过本发明,可减少三维模型在拆分组合的过程中与渲染的交互过程。
一种三维模型渲染系统及方法.pdf
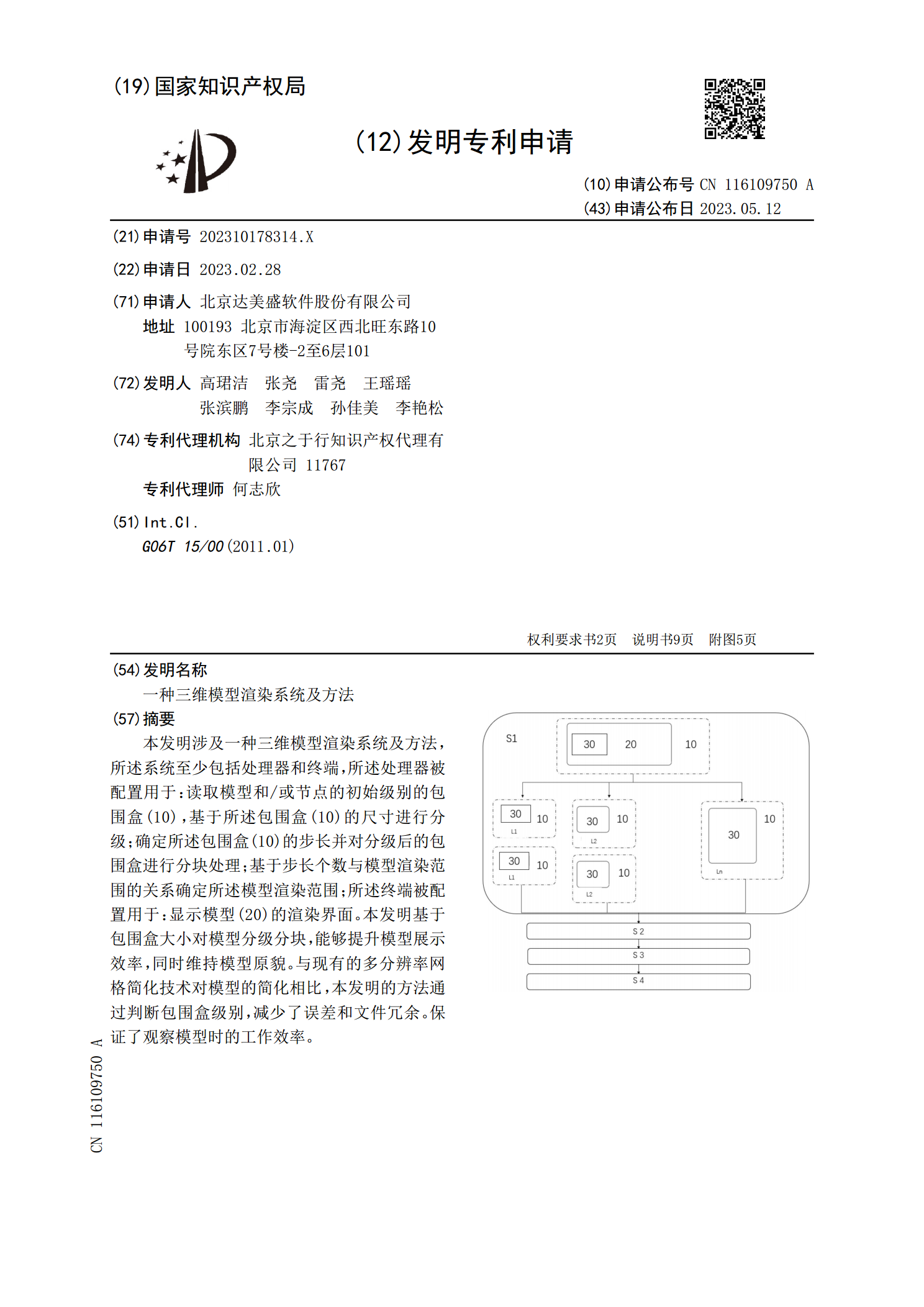
本发明涉及一种三维模型渲染系统及方法,所述系统至少包括处理器和终端,所述处理器被配置用于:读取模型和/或节点的初始级别的包围盒(10),基于所述包围盒(10)的尺寸进行分级;确定所述包围盒(10)的步长并对分级后的包围盒进行分块处理;基于步长个数与模型渲染范围的关系确定所述模型渲染范围;所述终端被配置用于:显示模型(20)的渲染界面。本发明基于包围盒大小对模型分级分块,能够提升模型展示效率,同时维持模型原貌。与现有的多分辨率网格简化技术对模型的简化相比,本发明的方法通过判断包围盒级别,减少了误差和文件冗余

一种三维模型渲染方法及系统.pdf
本申请涉及一种三维模型渲染方法及系统,方法包括响应于获取到的三维模型,读取三维模型的坐标点数据;根据坐标点数据构建三维模型的点阵模型,点阵模型由平面和曲面组成,平面包括至少三个三维点坐标,曲面包括多个点阵坐标;生成多个筛选扫描点并以筛选扫描点为基准对点阵模型进行扫描,滤除无法与筛选扫描点建立直接连接的平面和曲面,得到三维视觉模型;对位于显示区域的部分三维视觉模型进行渲染以及响应于获取到的转动指令,对显示区域内的三维视觉模型进行更新并渲染。本申请公开的三维模型渲染方法及系统,通过对三维模型进行重构以及使用以
三维模型渲染方法及系统.pdf
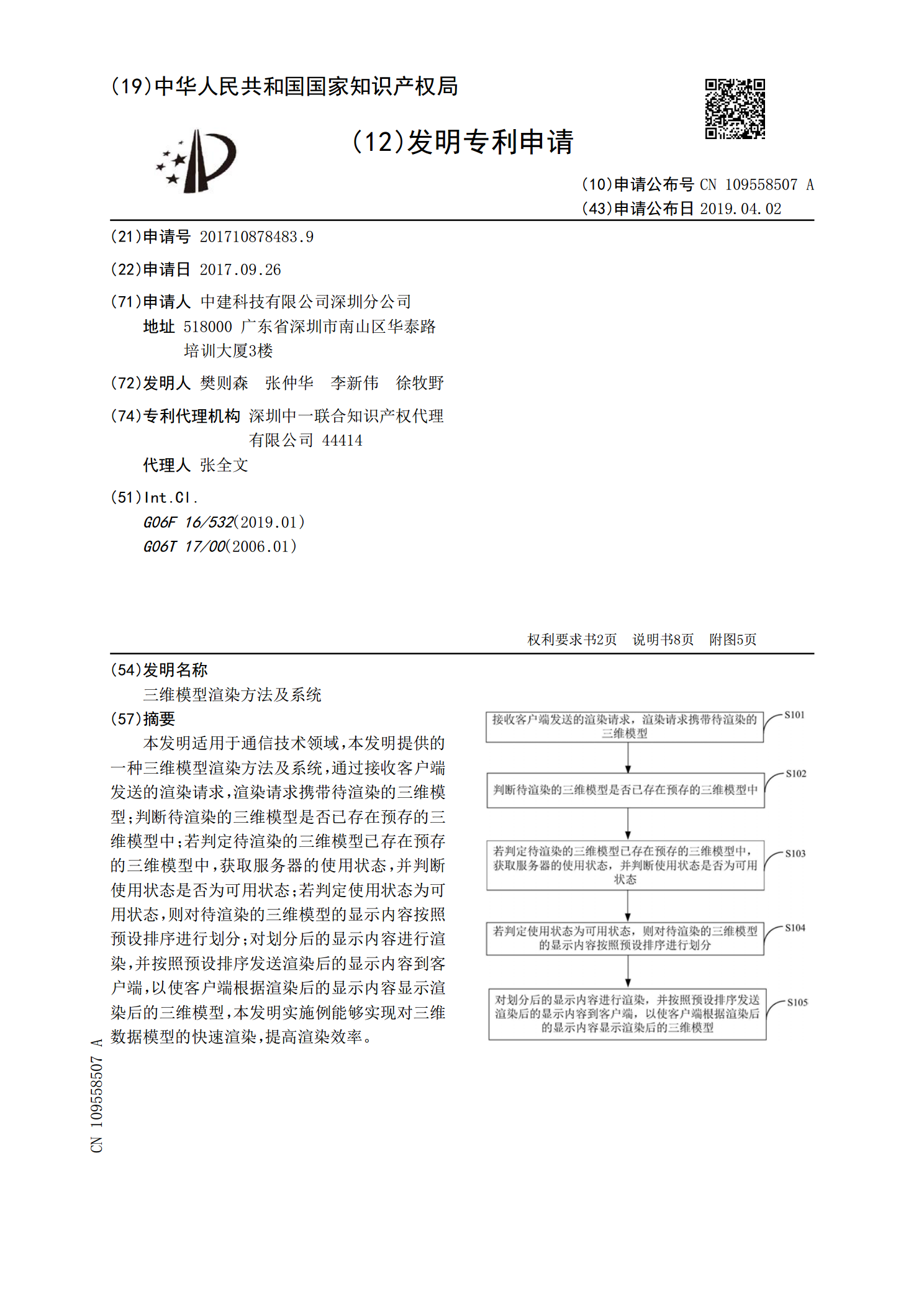
本发明适用于通信技术领域,本发明提供的一种三维模型渲染方法及系统,通过接收客户端发送的渲染请求,渲染请求携带待渲染的三维模型;判断待渲染的三维模型是否已存在预存的三维模型中;若判定待渲染的三维模型已存在预存的三维模型中,获取服务器的使用状态,并判断使用状态是否为可用状态;若判定使用状态为可用状态,则对待渲染的三维模型的显示内容按照预设排序进行划分;对划分后的显示内容进行渲染,并按照预设排序发送渲染后的显示内容到客户端,以使客户端根据渲染后的显示内容显示渲染后的三维模型,本发明实施例能够实现对三维数据模型的
一种三维模型渲染方法和装置.pdf
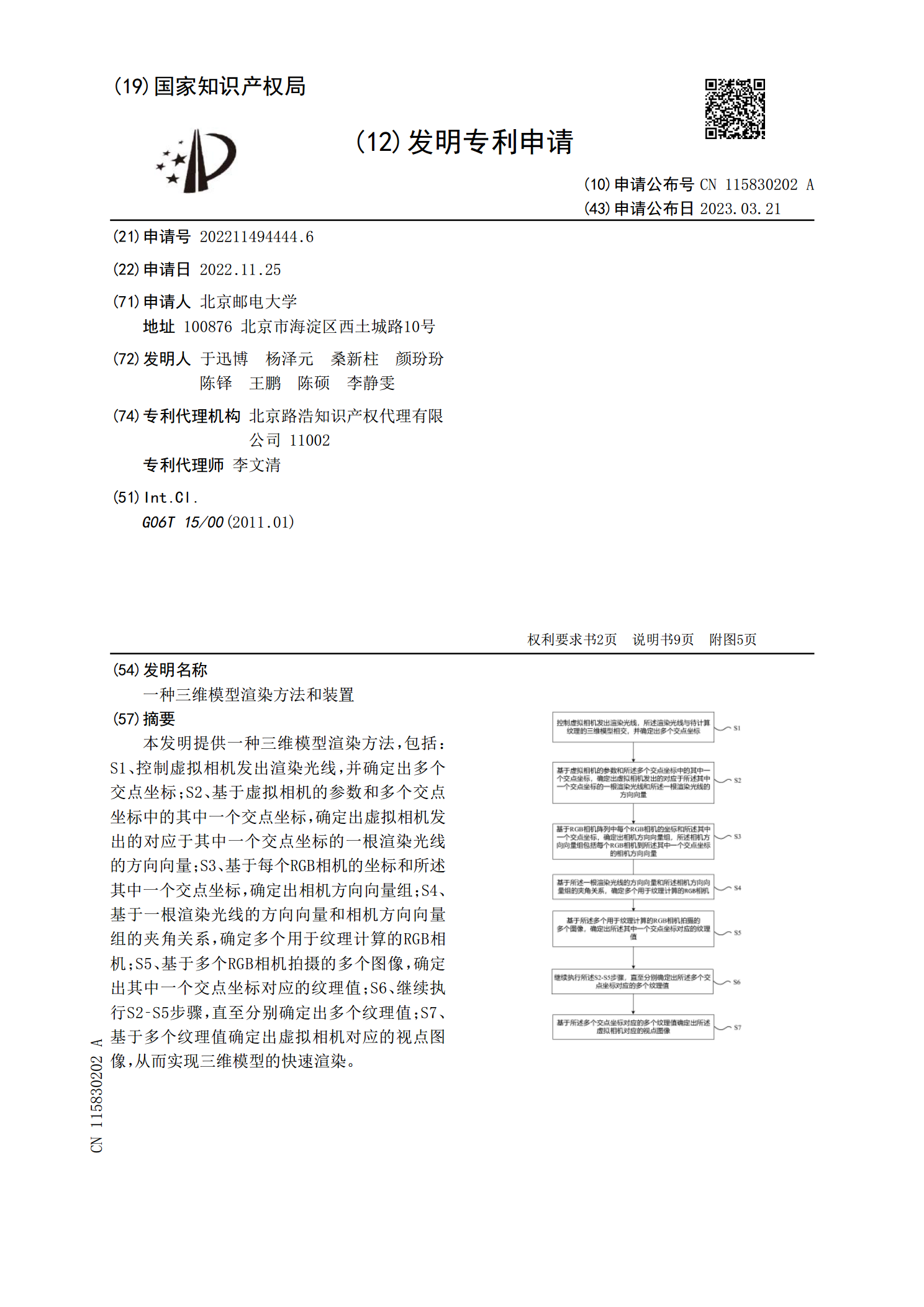
本发明提供一种三维模型渲染方法,包括:S1、控制虚拟相机发出渲染光线,并确定出多个交点坐标;S2、基于虚拟相机的参数和多个交点坐标中的其中一个交点坐标,确定出虚拟相机发出的对应于其中一个交点坐标的一根渲染光线的方向向量;S3、基于每个RGB相机的坐标和所述其中一个交点坐标,确定出相机方向向量组;S4、基于一根渲染光线的方向向量和相机方向向量组的夹角关系,确定多个用于纹理计算的RGB相机;S5、基于多个RGB相机拍摄的多个图像,确定出其中一个交点坐标对应的纹理值;S6、继续执行S2‑S5步骤,直至分别确定出