
一种真实场景虚拟化采集方法和电路.pdf

雨巷****轶丽


1/9
2/9

3/9

4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种真实场景虚拟化采集方法和电路.pdf
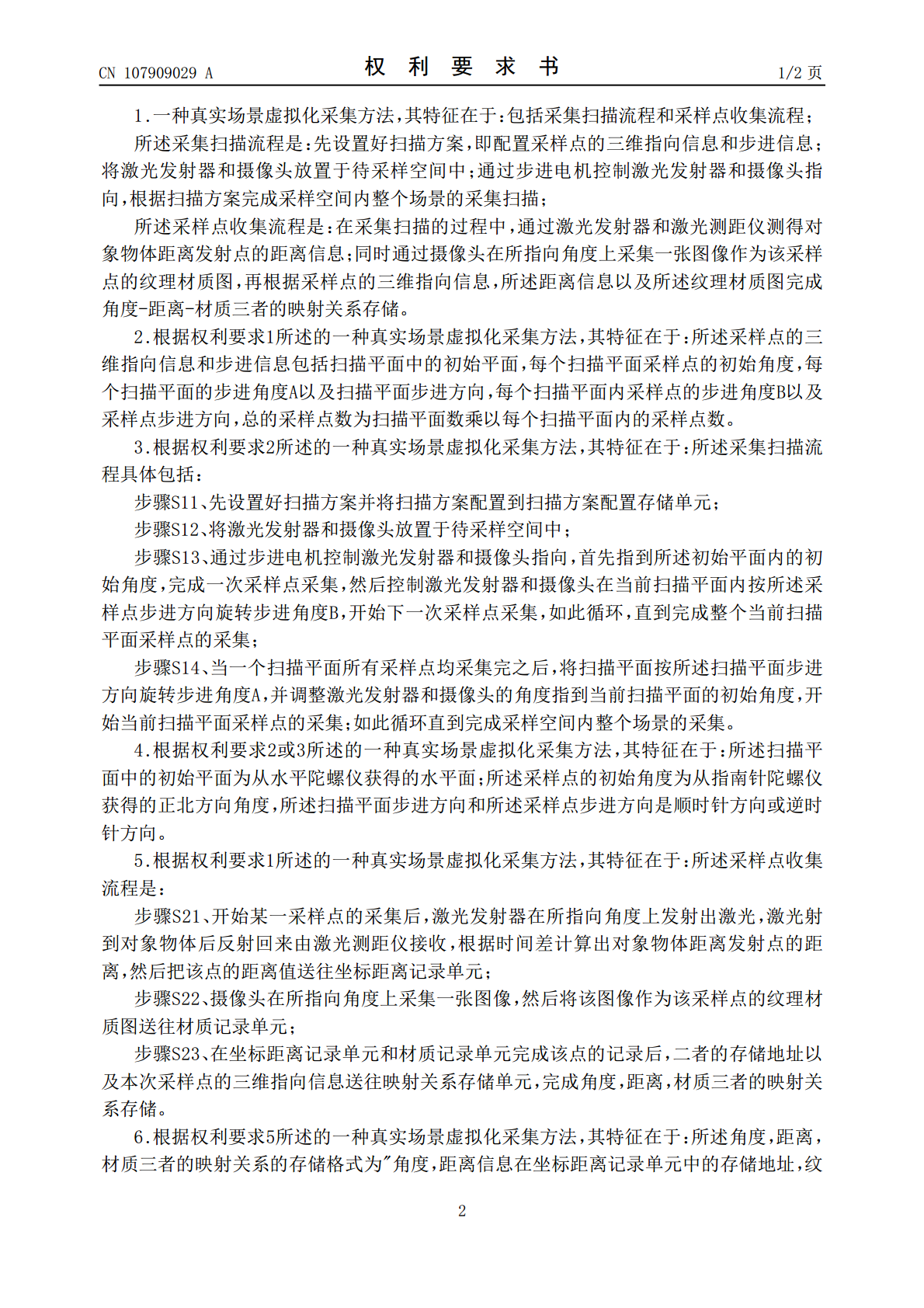
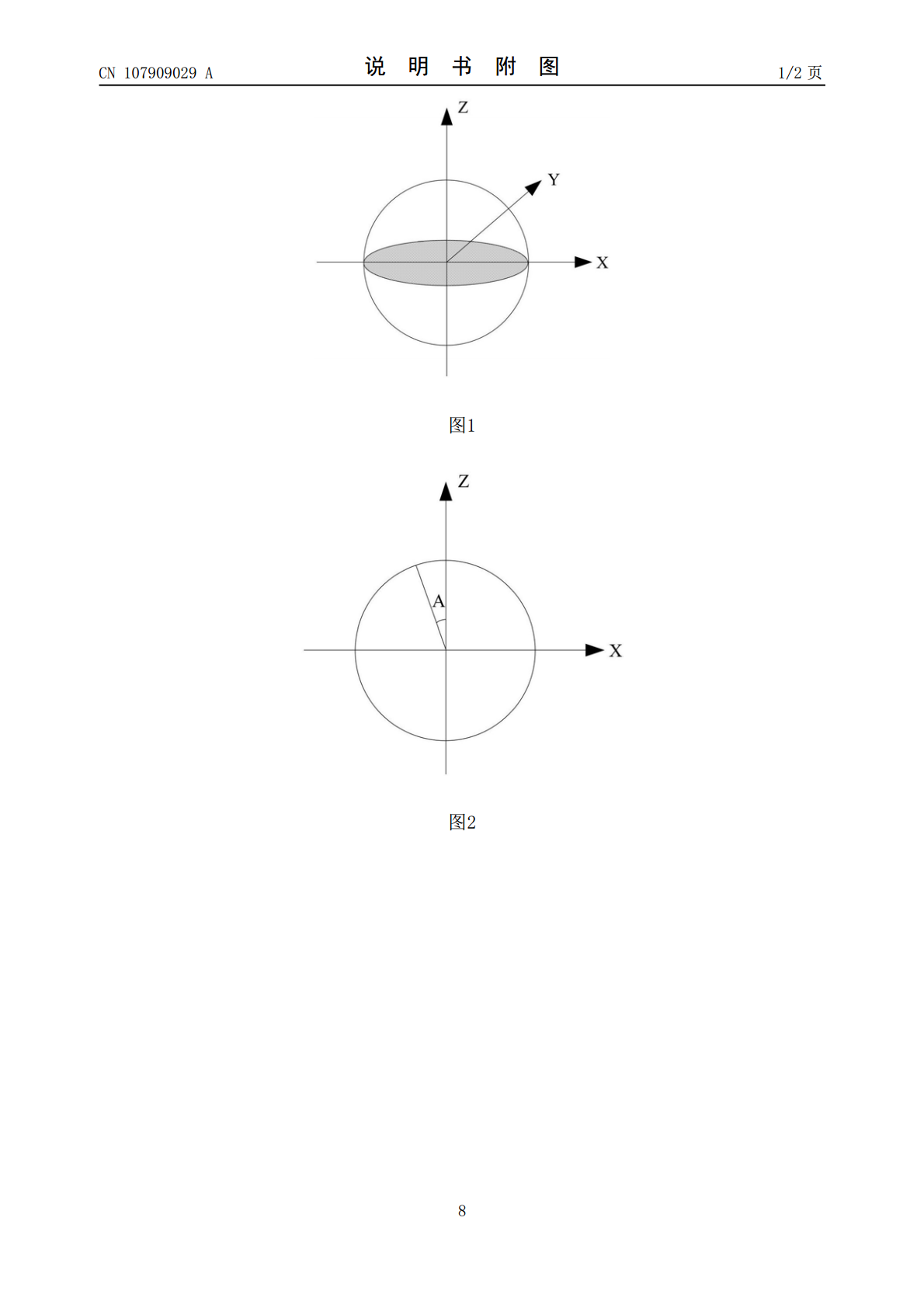
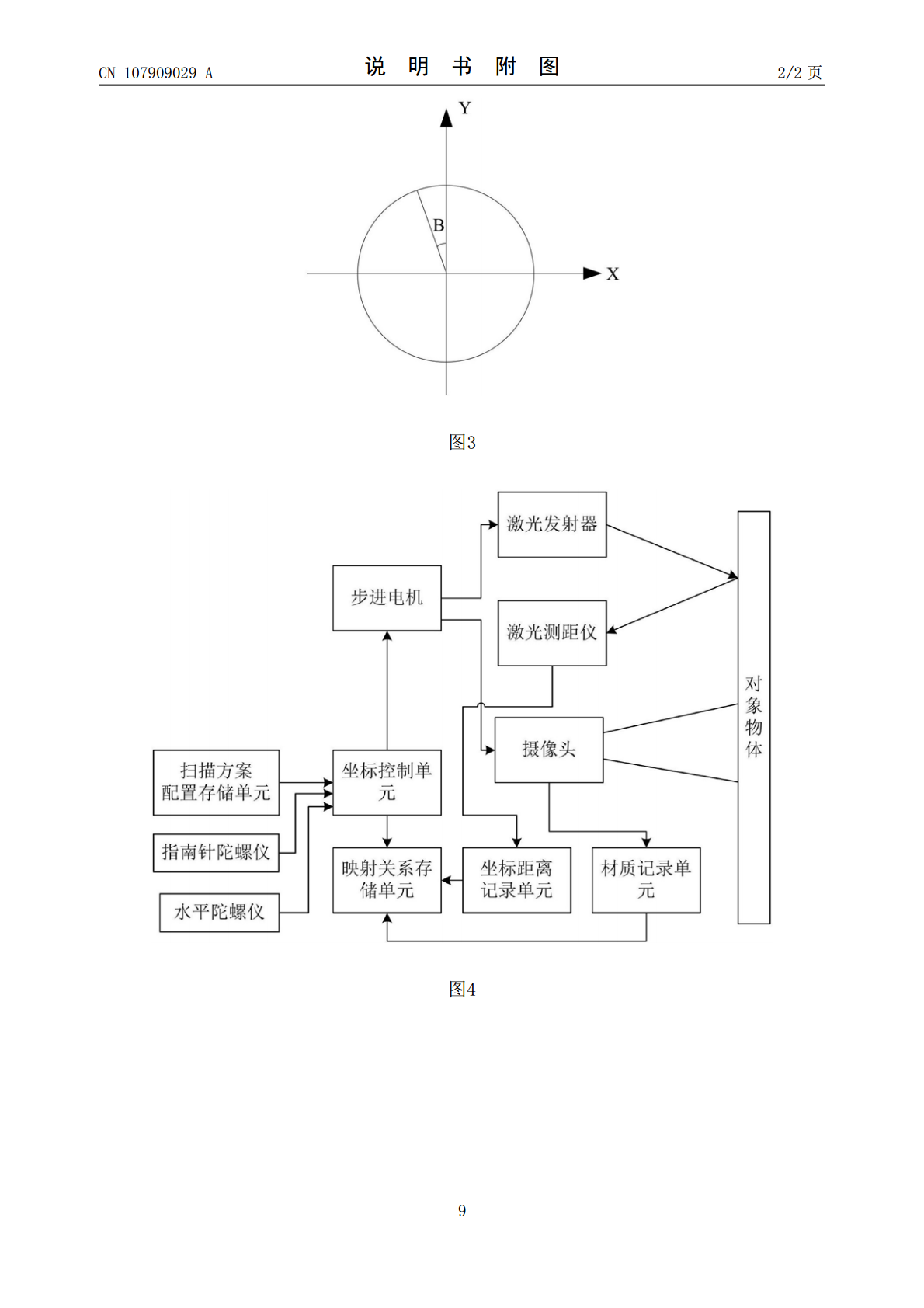
本发明提供一种真实场景虚拟化采集方法,包括采集扫描流程:先设置好扫描方案,即配置采样点的三维指向信息和步进信息;将激光发射器和摄像头放置于待采样空间中;通过步进电机控制激光发射器和摄像头指向,根据扫描方案完成采样空间内整个场景的采集扫描;还包括采样点收集流程:通过激光发射器和激光测距仪测得对象物体距离发射点的距离信息;同时通过摄像头采集该采样点的纹理材质图,再完成角度‑距离‑材质三者的映射关系存储。本发明还提供相应的真实场景虚拟化采集电路,使得真实场景的物理信息得到完整记录,可以在还原时通过GPU的实时渲

一种根据真实场景信息实现虚拟场景显示的方法及系统.pdf
本发明涉及一种根据真实场景信息实现虚拟场景显示的方法及系统,系统包括采集模块:由移动设备的至少一个环境传感器捕获的真实场景的图像数据;特征提取模块:用于对图像数据进行特征提取;虚拟场景匹配模块:根据拍摄的真实场景环境信息和GPS位置信息,调取与真实环境信息相匹配的虚拟场景集合;同时根据真实环境信息对虚拟场景进行一致性调节;以及虚拟场景输出:选择想要播放的虚拟场景,进行播放。本发明解决了现有的工具软件娱乐性太强,缺少知识趣味性以及真实性的技术问题。本发明利用一个真实场景图片的输入,可以实现不同时间背景下该环

一种虚拟场景的渲染方法和装置.pdf
本申请涉及一种虚拟场景的渲染方法和装置,其中,该方法包括:在渲染虚拟场景时,获取虚拟场景对应的渲染框架图,其中,渲染框架图中记录了虚拟场景对应的渲染流程信息和渲染资源信息,渲染流程信息用于指示渲染虚拟场景所划分的渲染阶段和每个渲染阶段所划分的渲染子阶段,渲染资源信息用于指示允许每个渲染子阶段使用图形处理器的片上分片缓存所对应的渲染资源的资源状态;按照渲染框架图创建虚拟场景对应的目标渲染流程,其中,目标渲染流程中所使用的目标渲染资源满足渲染资源信息所指示的资源状态;按照目标渲染流程渲染虚拟场景。本申请解决了

一种虚拟场景数字化应用交互方法.pdf
本发明涉及虚拟现实仿真交互技术领域,尤指一种虚拟场景数字化应用交互方法,包括:S1、收集社交信息并上传至云平台中;S2、在仿真操控场景中导入社交信息并将不同信息重新排列为可任意抽取片段信息的数据库;S3、从数据库中检索待虚拟进行的场景信息并组合储存为一个集合,然后将集合信息导入到虚拟操作端;S4、在虚拟操作端通过人机交互进行信息展示及互动交流;S5、虚拟操作端对用户表现进行分析评价,然后用户对虚拟操作端的交互整过程进行反馈;本发明可实现社交类软件的基本功能,并在特定范围内可视对方的存在,实现足不出户即可享

一种增强虚拟现实场景光照与反射真实度的方法.pdf
本发明公开了一种增强虚拟现实场景光照与反射真实度的方法,包括:录入用户绘制的户型区域,并对户型区域数据进行预处理;基于模块特征,划分户型内功能模块;基于模块特性,计算生成各模块的补光灯对象;基于环境参数,调整补光灯的强度和颜色;提取环境中的反射材质,根据不透明度和反射系数划分不同的种类;基于环境参数和周围物体,生成反射贴图,实时渲染补光灯。本发明通过并行计算区域补光灯信息和反射贴图,大大提升了实时渲染效果体验,并通过这两种途径,有效提高渲染效率,大大提升交互体验。