
基于EG-SLAM的无人机实时三维场景重建方法.pdf

努力****元恺


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于EG-SLAM的无人机实时三维场景重建方法.pdf
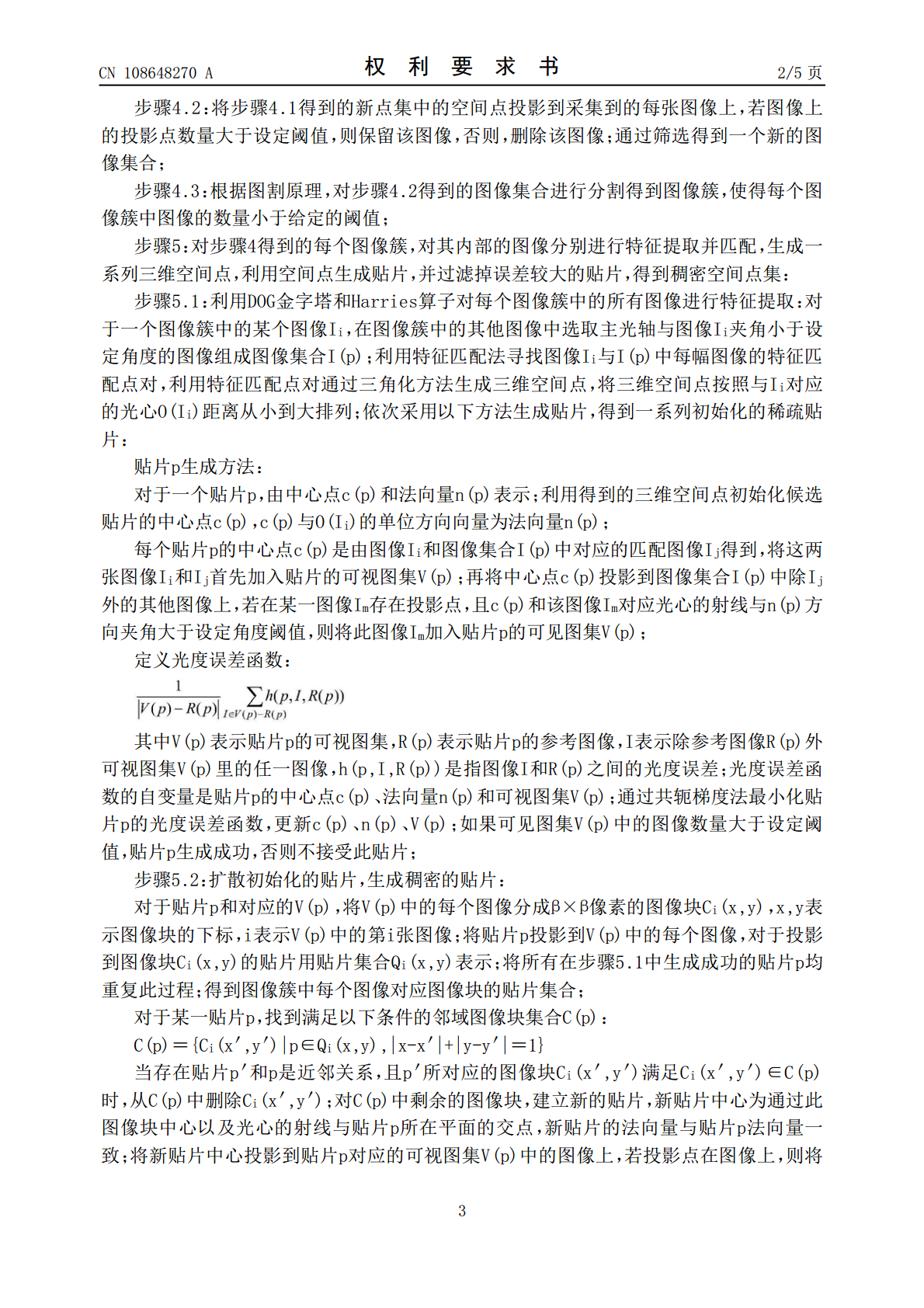
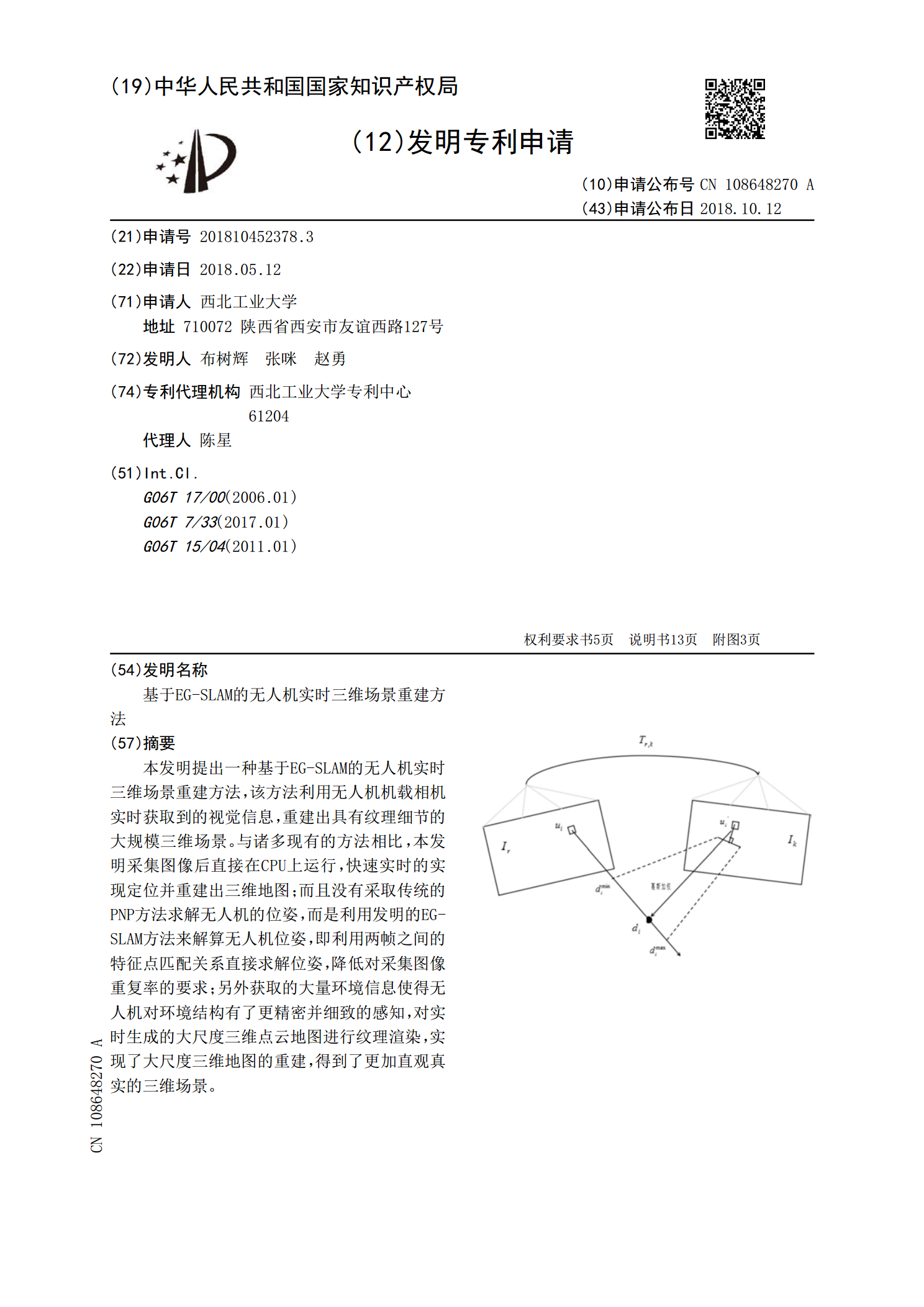
本发明提出一种基于EG‑SLAM的无人机实时三维场景重建方法,该方法利用无人机机载相机实时获取到的视觉信息,重建出具有纹理细节的大规模三维场景。与诸多现有的方法相比,本发明采集图像后直接在CPU上运行,快速实时的实现定位并重建出三维地图;而且没有采取传统的PNP方法求解无人机的位姿,而是利用发明的EG‑SLAM方法来解算无人机位姿,即利用两帧之间的特征点匹配关系直接求解位姿,降低对采集图像重复率的要求;另外获取的大量环境信息使得无人机对环境结构有了更精密并细致的感知,对实时生成的大尺度三维点云地图进行纹理

基于深度相机的三维场景实时重建方法.pdf
本发明公开了一种基于深度相机的三维场景实时重建方法,包括以下步骤:原始深度数据和颜色数据的获取,深度数据去噪处理,深度图像坐标转换,相机姿态追踪,点云融合和记录颜色信息,点云模型隐含表面渲染,场景模型重建。本发明利用单个深度相机扫描场景,获得场景的深度数据流,在计算机上完成对数据的实时处理,并生成相应的三维模型,该方法可以提供低成本、易操作、高质量、具有实时性的三维重建系统,产生高质量、可视化强的三维模型。
实时三维场景重建方法及装置.pdf
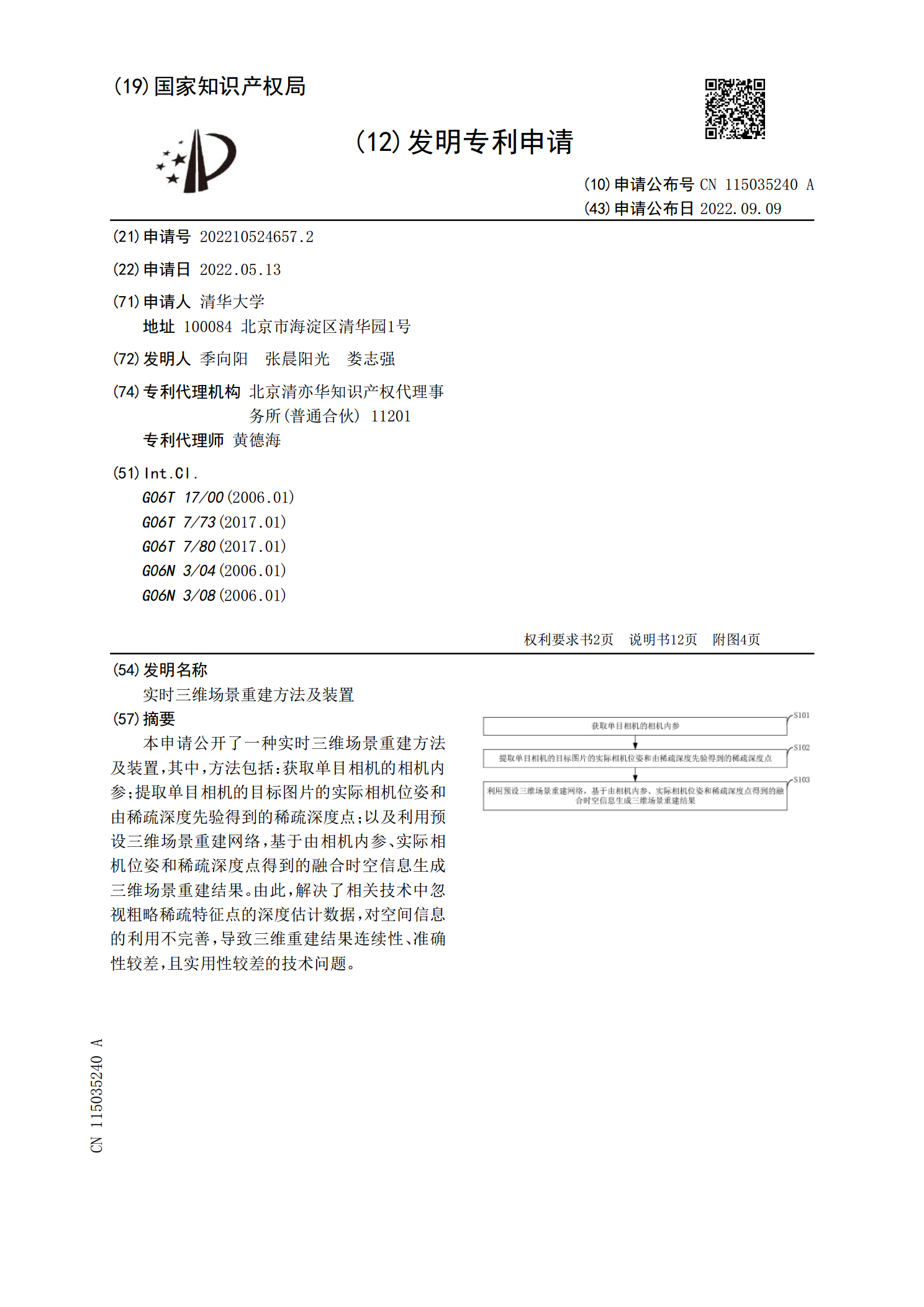
本申请公开了一种实时三维场景重建方法及装置,其中,方法包括:获取单目相机的相机内参;提取单目相机的目标图片的实际相机位姿和由稀疏深度先验得到的稀疏深度点;以及利用预设三维场景重建网络,基于由相机内参、实际相机位姿和稀疏深度点得到的融合时空信息生成三维场景重建结果。由此,解决了相关技术中忽视粗略稀疏特征点的深度估计数据,对空间信息的利用不完善,导致三维重建结果连续性、准确性较差,且实用性较差的技术问题。

基于智能移动设备的三维场景实时重建的开题报告.docx
基于智能移动设备的三维场景实时重建的开题报告一、课题背景如今,智能移动设备已成为人们生活中不可或缺的一部分。智能手机、平板电脑等智能设备已经成为人们进行沟通、学习、娱乐等方面的主要工具。智能移动设备的快速普及和强大的性能,为三维场景实时重建技术的发展提供了契机。三维场景实时重建是一个热门的领域。它通过使用传感器和算法,从对场景的图像和运动的分析中,重建出三维场景的模型。目前,大多数三维场景实时重建系统都是基于计算机摄像机、激光测距仪等专业设备的,这些设备太大、太昂贵,使用不便。而基于智能移动设备的三维场景

基于Kinect的三维场景实时重建及相关技术研究的开题报告.docx
基于Kinect的三维场景实时重建及相关技术研究的开题报告开题报告一、项目背景传统的视觉传感器往往无法提供足够的信息,以进行丰富的三维场景建模。而如今的Kinect相机可以同时获取RGB彩色图像和深度图像,使得三维场景重建成为可能。同时,Kinect技术本身也在不断发展进步,新一代的Kinect相机能够提供更高精度的深度图像和更多的信息,使得三维建模更加精确和高效。因此,本项目旨在探索利用Kinect相机进行三维场景实时重建的技术,并研究相关的算法和实现方法,使得我们可以实现高效、准确、实时的三维场景重建