
实时三维场景重建方法及装置.pdf

书生****瑞梦

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
实时三维场景重建方法及装置.pdf
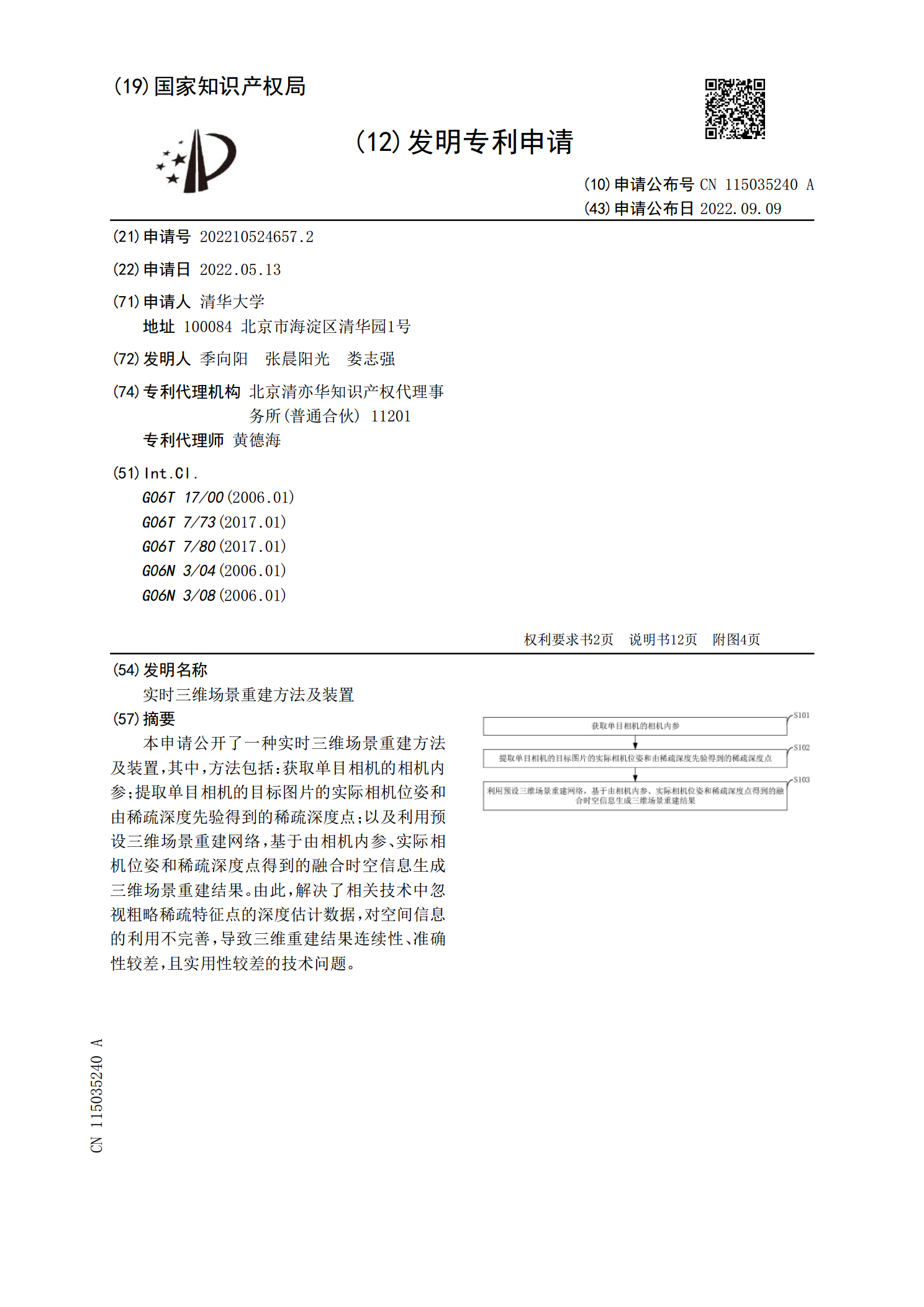
本申请公开了一种实时三维场景重建方法及装置,其中,方法包括:获取单目相机的相机内参;提取单目相机的目标图片的实际相机位姿和由稀疏深度先验得到的稀疏深度点;以及利用预设三维场景重建网络,基于由相机内参、实际相机位姿和稀疏深度点得到的融合时空信息生成三维场景重建结果。由此,解决了相关技术中忽视粗略稀疏特征点的深度估计数据,对空间信息的利用不完善,导致三维重建结果连续性、准确性较差,且实用性较差的技术问题。

基于深度相机的三维场景实时重建方法.pdf
本发明公开了一种基于深度相机的三维场景实时重建方法,包括以下步骤:原始深度数据和颜色数据的获取,深度数据去噪处理,深度图像坐标转换,相机姿态追踪,点云融合和记录颜色信息,点云模型隐含表面渲染,场景模型重建。本发明利用单个深度相机扫描场景,获得场景的深度数据流,在计算机上完成对数据的实时处理,并生成相应的三维模型,该方法可以提供低成本、易操作、高质量、具有实时性的三维重建系统,产生高质量、可视化强的三维模型。
三维场景重建方法、装置、介质及设备.pdf
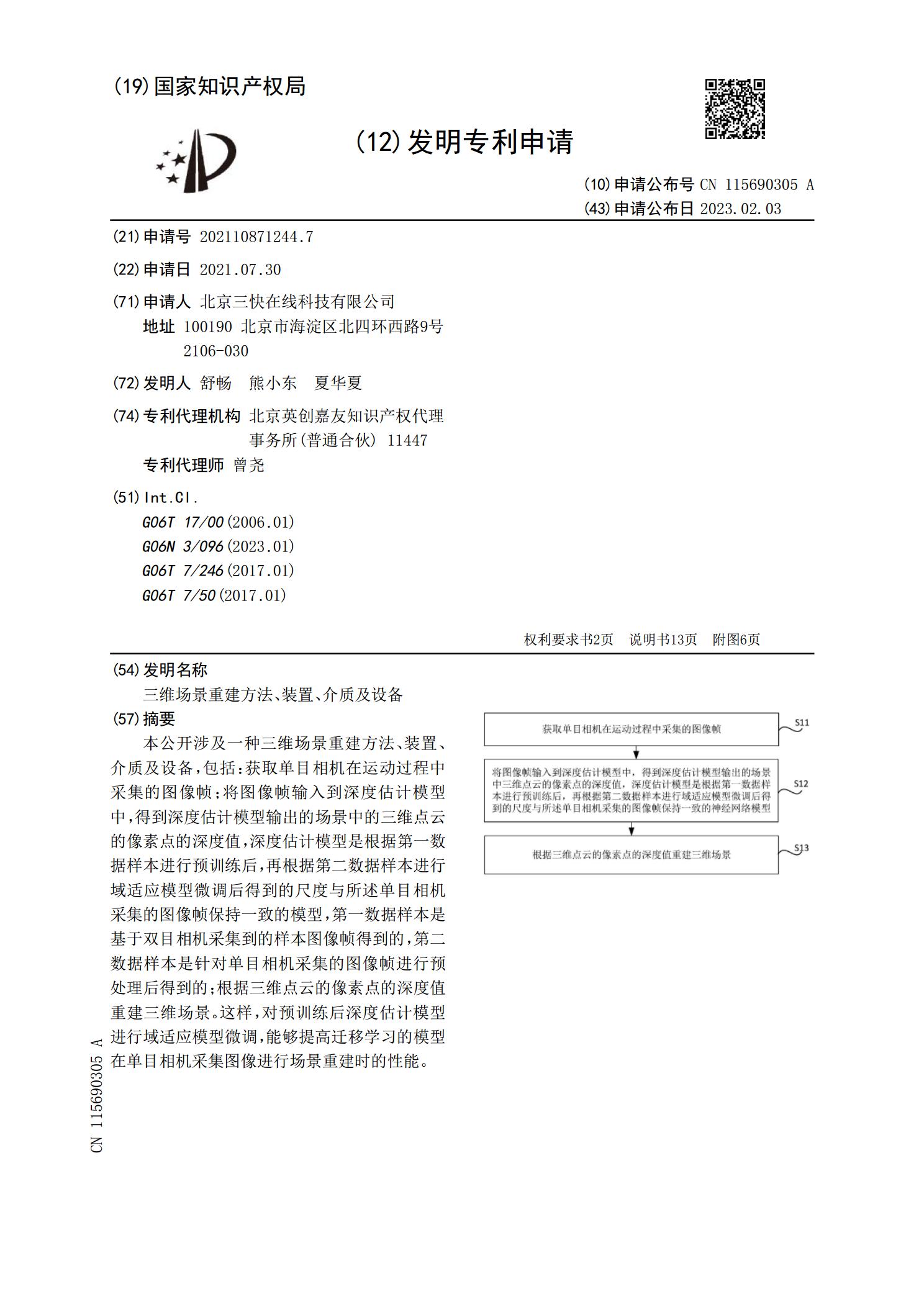
本公开涉及一种三维场景重建方法、装置、介质及设备,包括:获取单目相机在运动过程中采集的图像帧;将图像帧输入到深度估计模型中,得到深度估计模型输出的场景中的三维点云的像素点的深度值,深度估计模型是根据第一数据样本进行预训练后,再根据第二数据样本进行域适应模型微调后得到的尺度与所述单目相机采集的图像帧保持一致的模型,第一数据样本是基于双目相机采集到的样本图像帧得到的,第二数据样本是针对单目相机采集的图像帧进行预处理后得到的;根据三维点云的像素点的深度值重建三维场景。这样,对预训练后深度估计模型进行域适应模型微

用于场景三维重建的方法及装置、三维重建系统.pdf
本申请涉及计算机技术领域,公开一种用于场景三维重建的方法,包括:通过图像初步处理,构建词袋树;根据词袋树,进行组内图像处理,获得组内匹配信息和图像组特征向量;根据图像组特征向量,进行组间图像处理,获得组间匹配信息;根据组内匹配信息和组间匹配信息,进行模型重建。通过图像初步处理,进行词袋树的构建。根据构建的词袋树,进行组内图像处理,得到每一幅图像的组内匹配信息和图像组特征向量。根据图像组特征向量,进行组间图像处理,得到组间匹配信息。利用组内匹配信息和组间匹配信息进行模型重建,以通过迷你无人机采集图像时,提高
场景重建方法及装置.pdf
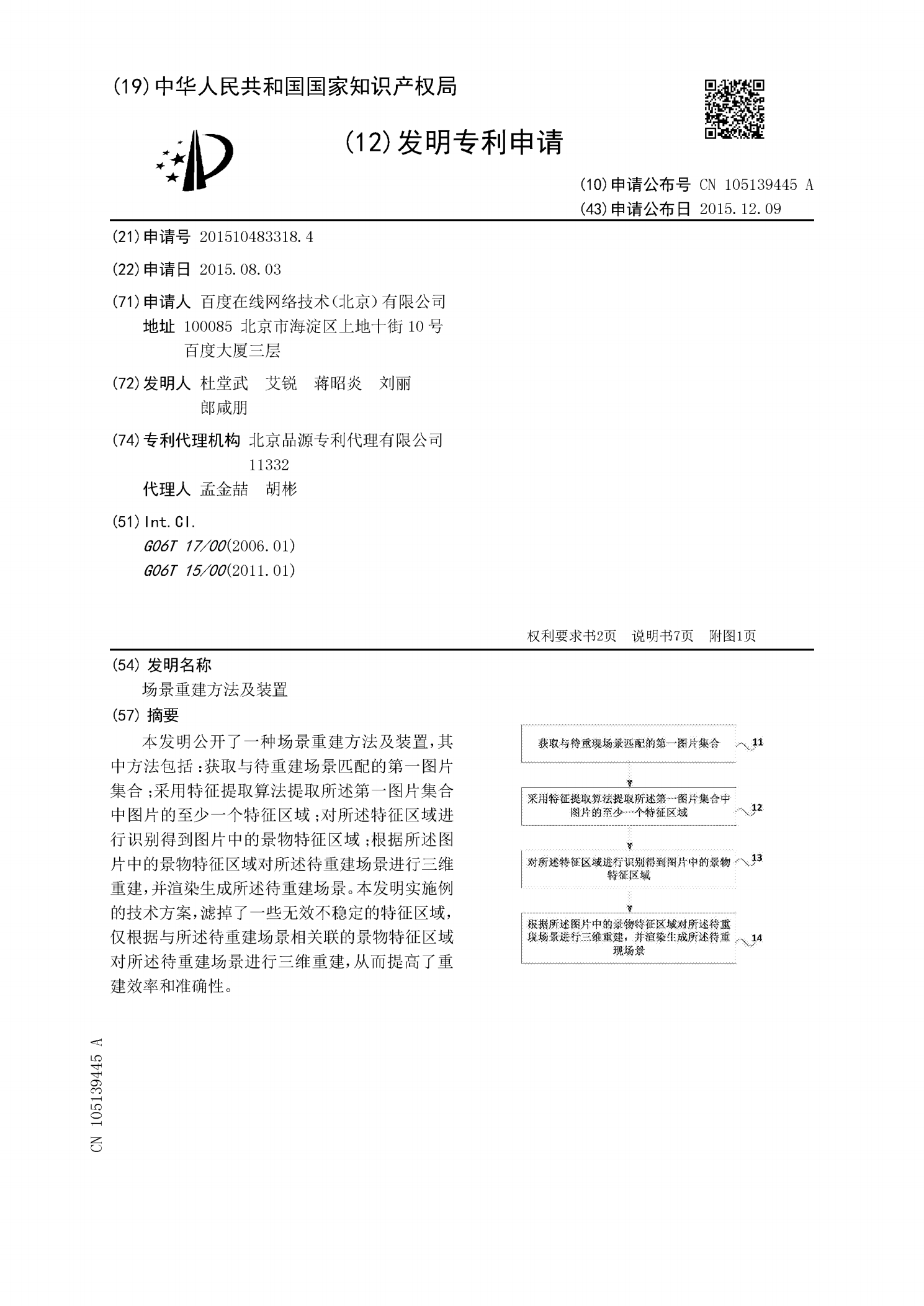
本发明公开了一种场景重建方法及装置,其中方法包括:获取与待重建场景匹配的第一图片集合;采用特征提取算法提取所述第一图片集合中图片的至少一个特征区域;对所述特征区域进行识别得到图片中的景物特征区域;根据所述图片中的景物特征区域对所述待重建场景进行三维重建,并渲染生成所述待重建场景。本发明实施例的技术方案,滤掉了一些无效不稳定的特征区域,仅根据与所述待重建场景相关联的景物特征区域对所述待重建场景进行三维重建,从而提高了重建效率和准确性。