
一种用于机械臂抓取系统中目标物体的位姿估计方法.pdf

一吃****昕靓


1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于机械臂抓取系统中目标物体的位姿估计方法.pdf
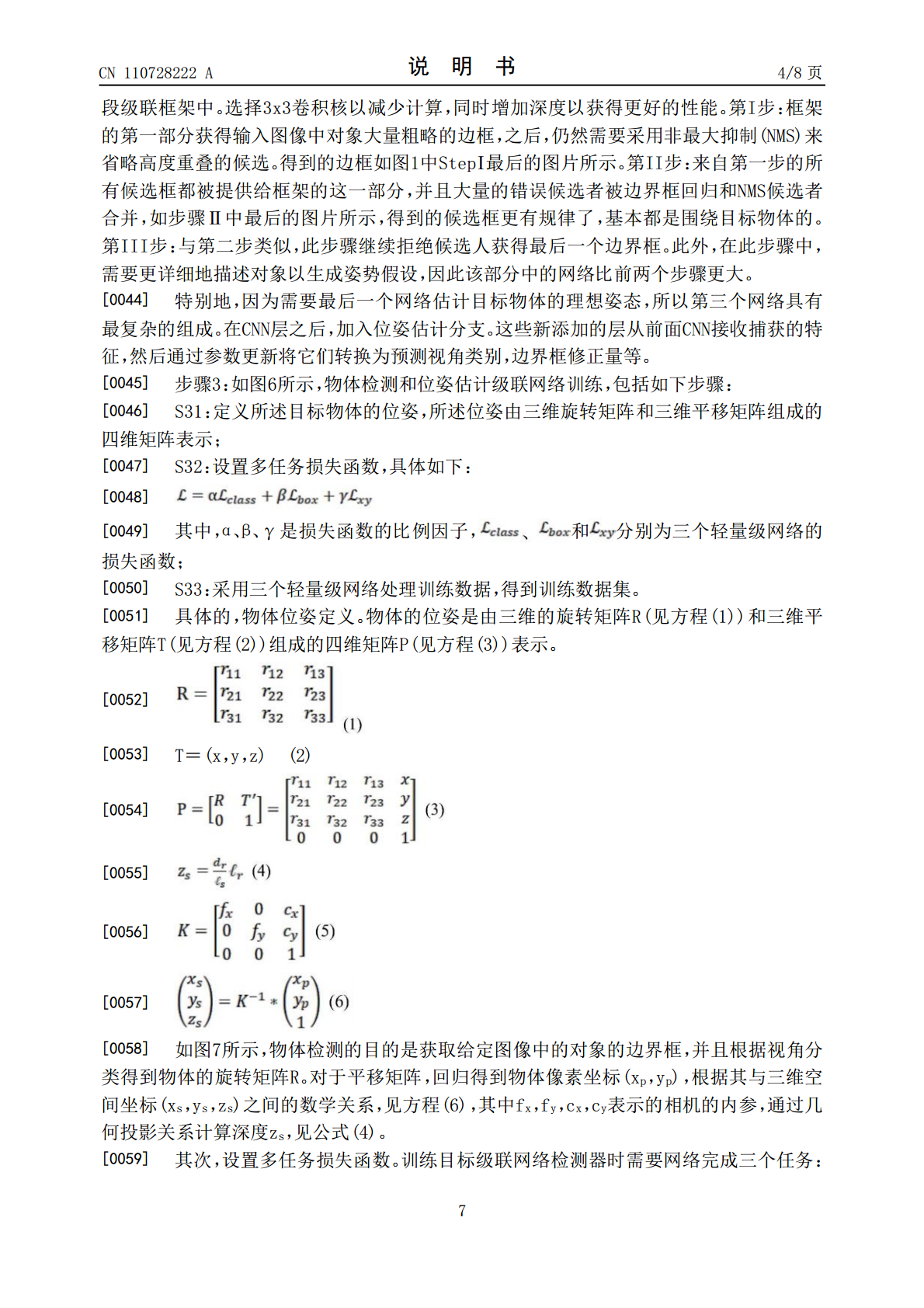
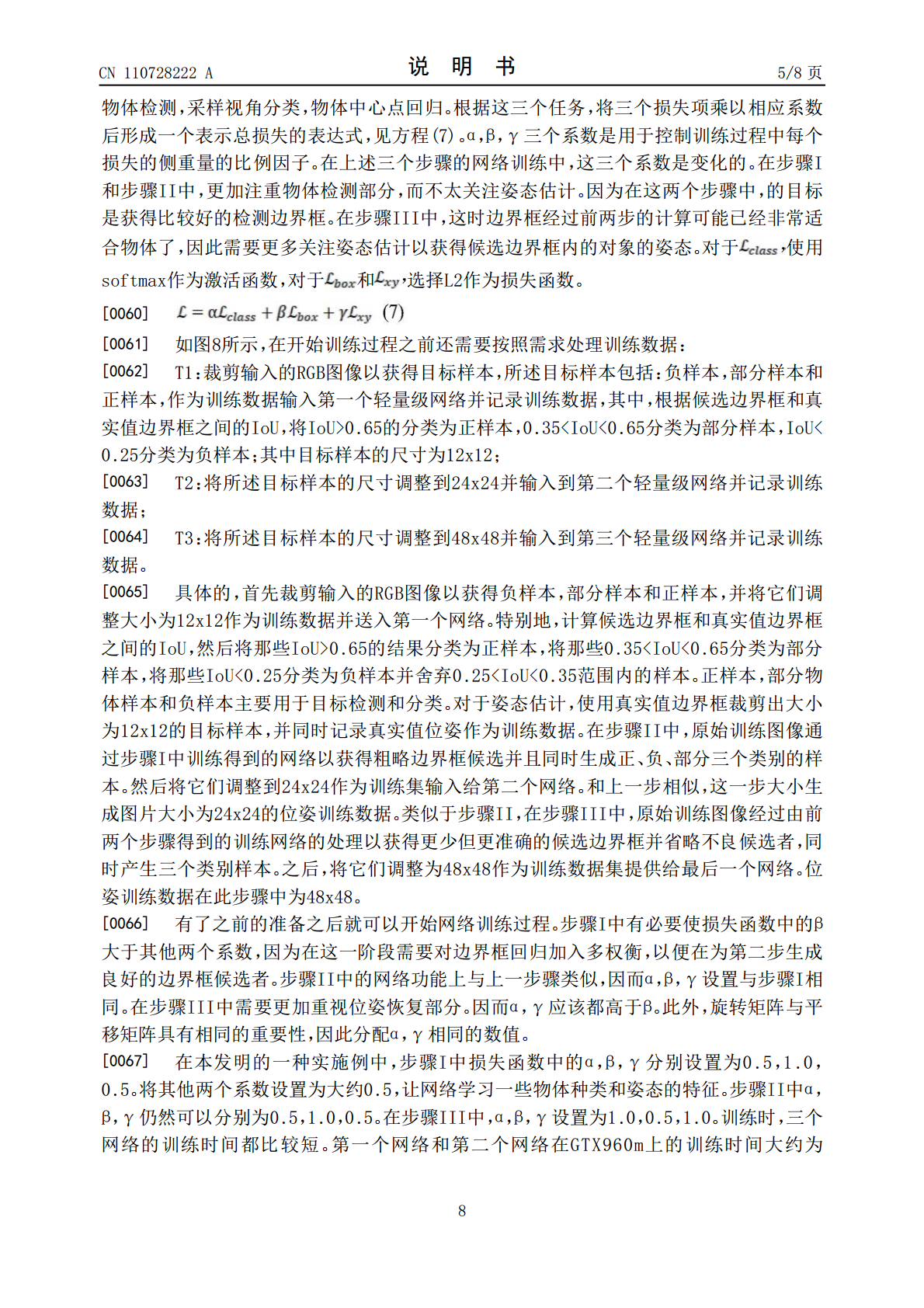
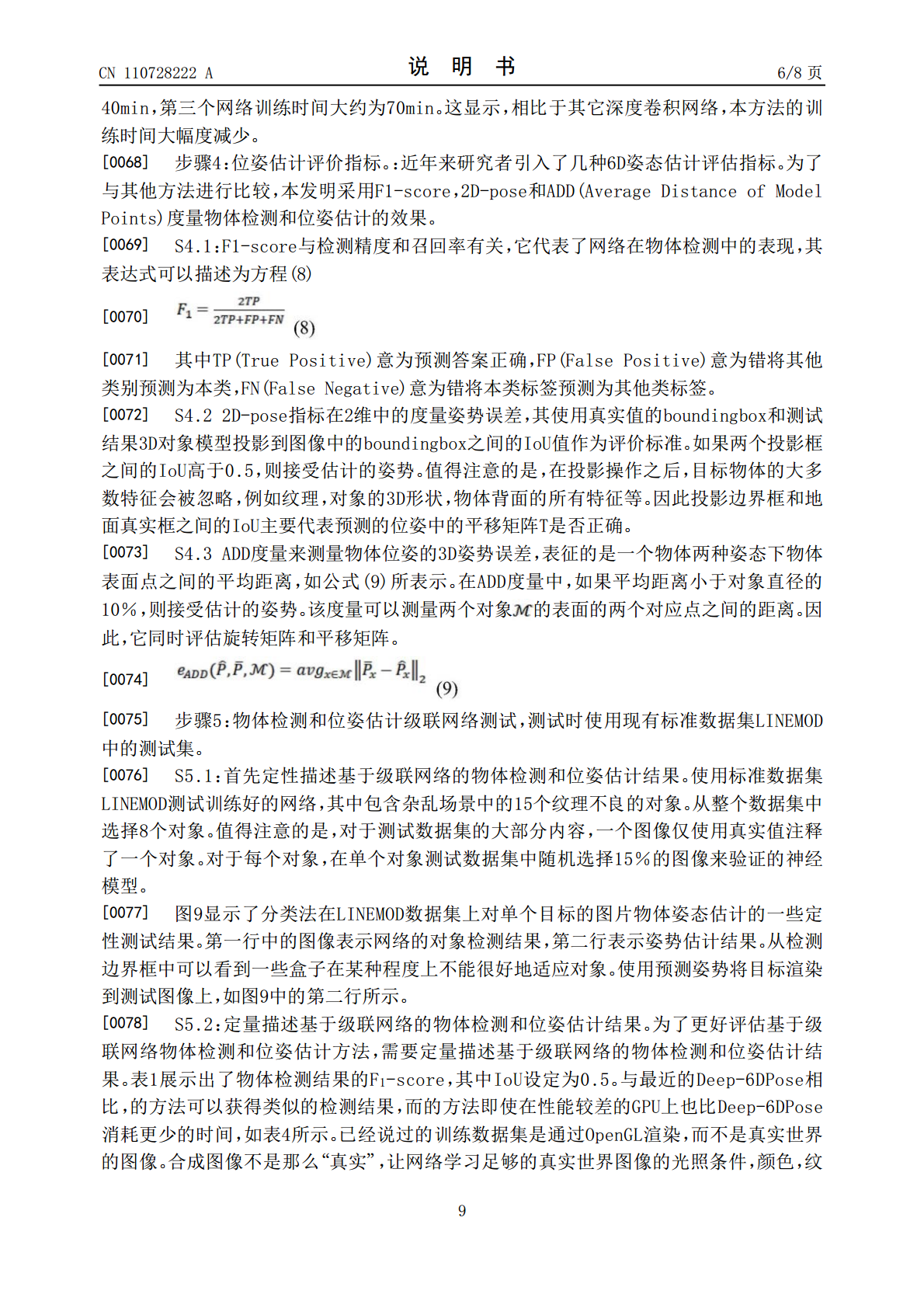
本发明提供一种用于机械臂抓取系统中目标物体的位姿估计方法,包括如下步骤:S1:渲染训练数据集;S2:构建目标物体的位姿估计级联网络,所述级联网络采用三个轻量级网络级联的方式;S3:训练所述目标物体的位姿估计级联网络。通过采用级联网络,使姿态估计问题成为分类问题,减少网络训练测试时间,提高检测精度。

面向机械臂抓取应用的高精度目标6D位姿估计.docx
面向机械臂抓取应用的高精度目标6D位姿估计摘要:机械臂抓取应用中,准确估计目标物体的6D位姿是至关重要的。本论文综述了当前机械臂抓取应用中的高精度目标6D位姿估计方法。首先介绍了目标6D位姿估计的背景和意义,然后详细讨论了常用的传感器和算法,并对它们的优缺点进行了评估。最后,通过对比不同方法在实际应用中的表现,总结了目标6D位姿估计的挑战和未来发展方向。关键词:机械臂抓取,目标6D位姿估计,传感器,算法1.引言机械臂在工业、农业、医疗等领域的应用越来越广泛。在许多机械臂的应用中,准确估计目标物体的6D位姿

基于多重几何约束的未知物体抓取位姿估计.docx
基于多重几何约束的未知物体抓取位姿估计Title:UnknownObjectGraspingPoseEstimationBasedonMultipleGeometryConstraintsAbstract:Graspingunknownobjectswitharoboticmanipulatorisachallengingtaskduetothelackofpriorknowledgeabouttheobject'sshapeandsize.Thispaperaddressestheproblemofes

基于点云相机的机械臂抓取位姿生成方法研究.docx
基于点云相机的机械臂抓取位姿生成方法研究标题:基于点云相机的机械臂抓取位姿生成方法研究摘要:近年来,机械臂技术在工业自动化领域得到广泛应用。机械臂的抓取位姿生成是机械臂操作中的关键问题之一。传统的位姿生成方法依赖于已知的物体模型和准确定位,但在实际应用中往往受到目标物体形状复杂、表面纹理变化等因素的限制。本文研究了基于点云相机的机械臂抓取位姿生成方法,通过对目标物体进行三维重建和位姿检测,实现了对复杂形状和表面变化物体的准确抓取位姿生成,并进行了相关实验验证。关键词:机械臂;抓取位姿生成;点云相机;三维重

面向无序堆叠工件抓取的位姿估计方法研究.docx
面向无序堆叠工件抓取的位姿估计方法研究研究背景和意义:面向无序堆叠工件抓取的位姿估计是一个具有挑战性的问题。在工业领域中,许多任务需要机器人能够准确地识别和抓取无序堆叠的工件。例如,在物流和仓储中,机器人需要能够识别出堆叠在一起的不同物品,并将其分开或装载到另一个位置。在制造业中,机器人需要能够准确地抓取并定位零部件以进行组装或加工。然而,由于工件的无序性、变形和相互覆盖造成的遮挡,以及光照条件的不稳定性,无序堆叠工件的位姿估计变得复杂而困难。准确的位姿估计有助于提高机器人处理无序堆叠工件的能力。它可以提