
基于多重几何约束的未知物体抓取位姿估计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多重几何约束的未知物体抓取位姿估计.docx
基于多重几何约束的未知物体抓取位姿估计Title:UnknownObjectGraspingPoseEstimationBasedonMultipleGeometryConstraintsAbstract:Graspingunknownobjectswitharoboticmanipulatorisachallengingtaskduetothelackofpriorknowledgeabouttheobject'sshapeandsize.Thispaperaddressestheproblemofes

一种用于机械臂抓取系统中目标物体的位姿估计方法.pdf
本发明提供一种用于机械臂抓取系统中目标物体的位姿估计方法,包括如下步骤:S1:渲染训练数据集;S2:构建目标物体的位姿估计级联网络,所述级联网络采用三个轻量级网络级联的方式;S3:训练所述目标物体的位姿估计级联网络。通过采用级联网络,使姿态估计问题成为分类问题,减少网络训练测试时间,提高检测精度。

基于神经网络的物体分类和位姿估计方法.pdf
本发明公开了一种基于神经网络的物体分类和位姿估计方法,主要解决现有技术在利用卷积神经网络进行物体检测和姿态估计时精度低的问题。其实现方案是:1)获得数据集中每个CAD模型多视角图像;2)根据CAD模型的多视角图像构建联合检测的数学模型;3)构建卷积神经网络并利用CAD模型的多视角图像训练卷积神经网络;(4)将测试集中每个CAD模型的多视角图像输入到神经网络,输出神经网络预测的类别标签和位姿标签。本发明结合了神经网络浅层特征图与深层特征图,使得结合以后的特征图既保留了丰富的位姿信息,也保留了良好的分类信息,

面向无序堆叠工件抓取的位姿估计方法研究.docx
面向无序堆叠工件抓取的位姿估计方法研究研究背景和意义:面向无序堆叠工件抓取的位姿估计是一个具有挑战性的问题。在工业领域中,许多任务需要机器人能够准确地识别和抓取无序堆叠的工件。例如,在物流和仓储中,机器人需要能够识别出堆叠在一起的不同物品,并将其分开或装载到另一个位置。在制造业中,机器人需要能够准确地抓取并定位零部件以进行组装或加工。然而,由于工件的无序性、变形和相互覆盖造成的遮挡,以及光照条件的不稳定性,无序堆叠工件的位姿估计变得复杂而困难。准确的位姿估计有助于提高机器人处理无序堆叠工件的能力。它可以提
物体抓取位姿的检测方法、装置、设备及存储介质.pdf
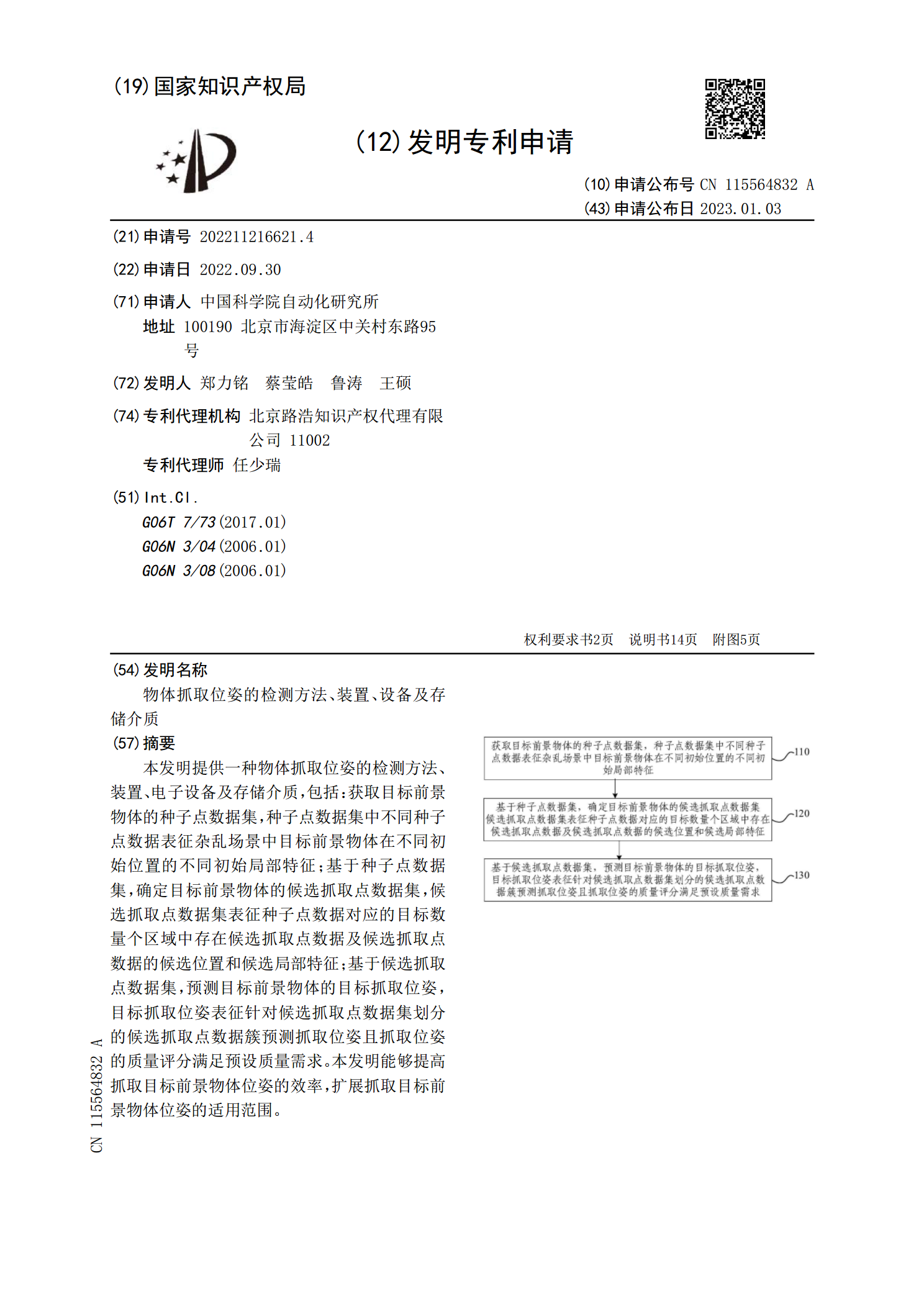
本发明提供一种物体抓取位姿的检测方法、装置、电子设备及存储介质,包括:获取目标前景物体的种子点数据集,种子点数据集中不同种子点数据表征杂乱场景中目标前景物体在不同初始位置的不同初始局部特征;基于种子点数据集,确定目标前景物体的候选抓取点数据集,候选抓取点数据集表征种子点数据对应的目标数量个区域中存在候选抓取点数据及候选抓取点数据的候选位置和候选局部特征;基于候选抓取点数据集,预测目标前景物体的目标抓取位姿,目标抓取位姿表征针对候选抓取点数据集划分的候选抓取点数据簇预测抓取位姿且抓取位姿的质量评分满足预设质