
用于监测自动化系统的方法、计算机程序产品及控制系统.pdf

一吃****仪凡


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于监测自动化系统的方法、计算机程序产品及控制系统.pdf
本发明提供一种用于监测包括多个组件的自动化系统的方法,包括:通过处理器基于位置数据和检视方向数据渲染来自表示自动化系统的至少部分的三维场景的图像;以及在显示单元上显示图像。所述方法使在相对较小的显示装置上监测自动化系统成为可能,同时显示所有相关信息。为此,组件分布在自动化系统的底板上,且组件分别布置在底板中的一个上的三维场景中,提供与底板相关联的输入元件,其中三维场景中的两相邻底板之间的竖直距离取决于输入元件处的输入改变,且自动化系统的组件之间的材料路径表示为场景中的线,其中至少一条线表示相邻底板之间的材

控制自动化系统的方法、控制系统及计算机程序产品.pdf
一种控制自动化系统的方法、控制系统及计算机程序产品。控制自动化系统的方法包括:由处理器基于位置数据及观看方向数据而依据三维场景来渲染图像,所述三维场景表示自动化系统的至少一部分;在显示单元上显示图像,其中自动化系统包括多个组件,其中在数据存储器中存储有树形结构,在树形结构中,节点被指派给自动化系统的组件,所述方法用以处理及显示对自动化系统进行控制的任务所必需的所有细节且另一方面使所需的计算容量最小化。出于此种目的,确定聚焦组件,并仅将自动化系统的所述部分中的如下那些组件从场景加载到处理器中以进行渲染:所述
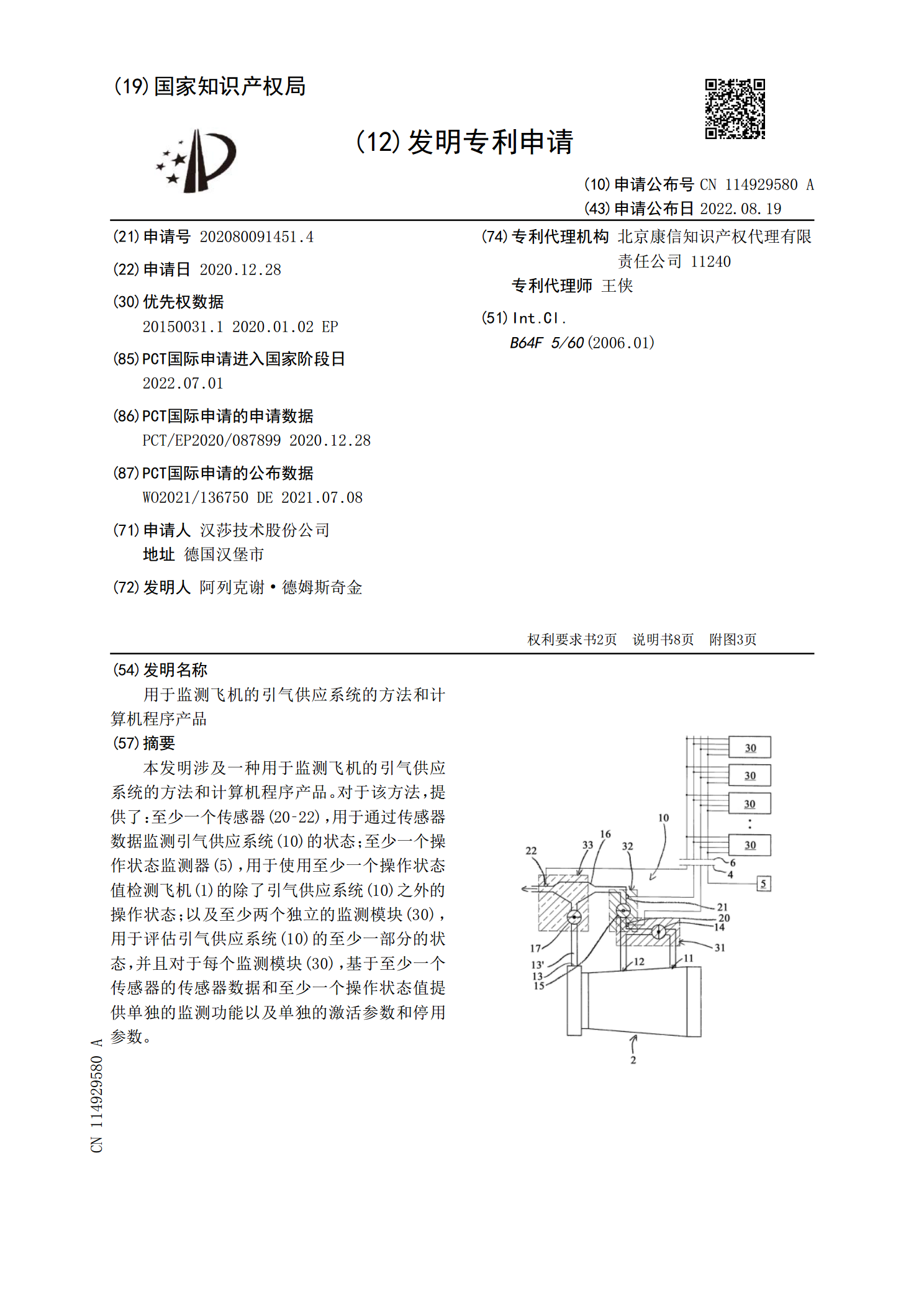
用于监测飞机的引气供应系统的方法和计算机程序产品.pdf
本发明涉及一种用于监测飞机的引气供应系统的方法和计算机程序产品。对于该方法,提供了:至少一个传感器(20?22),用于通过传感器数据监测引气供应系统(10)的状态;至少一个操作状态监测器(5),用于使用至少一个操作状态值检测飞机(1)的除了引气供应系统(10)之外的操作状态;以及至少两个独立的监测模块(30),用于评估引气供应系统(10)的至少一部分的状态,并且对于每个监测模块(30),基于至少一个传感器的传感器数据和至少一个操作状态值提供单独的监测功能以及单独的激活参数和停用参数。

用于燃气涡轮的调节和控制系统、计算机程序产品及方法.pdf
本发明涉及用于燃气涡轮的调节和控制系统、计算机程序产品及方法。具体而言,各种实施例包括一种系统,其具有:至少一个计算装置(814),该计算装置配置成通过执行包括以下项的动作来调节成组燃气涡轮(GT)(10):基于对于各个GT(10)的测得的环境条件命令成组GT(10)中的各个GT(10)至基本负载水平;命令成组GT(10)中的各个GT(10)调整相应的燃料流以匹配标称燃料流值,且随后测量对于各个GT(10)的实际排放值;以及基于相应的测得的实际排放值与环境条件下的标称排放值之间的差异调整成组GT(10)中

监测方法、系统、装置及计算机程序产品.pdf
本发明涉及监控技术领域,特别适用于监控中的定位。针对目前监控区域中定位并不精确且精确定位成本高等缺陷,提出了本发明的监测方法、系统、装置及计算机程序产品,旨在解决如何降低成本同时提高定位精度的技术问题。为此,本发明的方法依据电子地图,在指定位置设置多个采集点并相应地标定多个监控区域;并在每个所述采集点至少设置粗略定位采集和精确定位采集;通过多个采集点的粗略定位采集和精确定位采集分别获取被测目标的定位信息,计算被测目标的位置信息,有助于降低计算复杂度成本的同时提升定位精确。