
定位方法、装置、系统、电子设备及存储介质.pdf

努力****弘毅


1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位方法、装置、系统、电子设备及存储介质.pdf
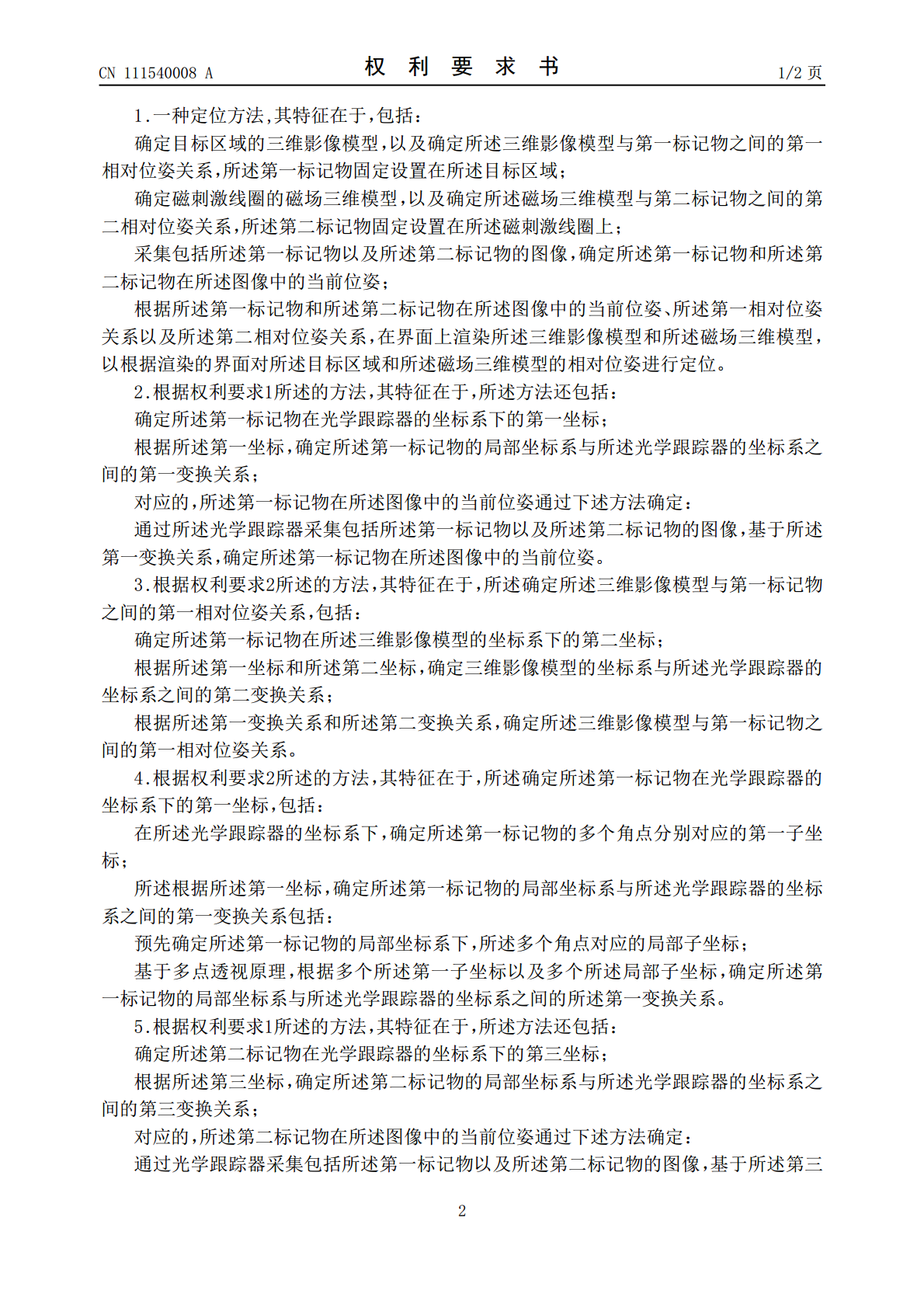
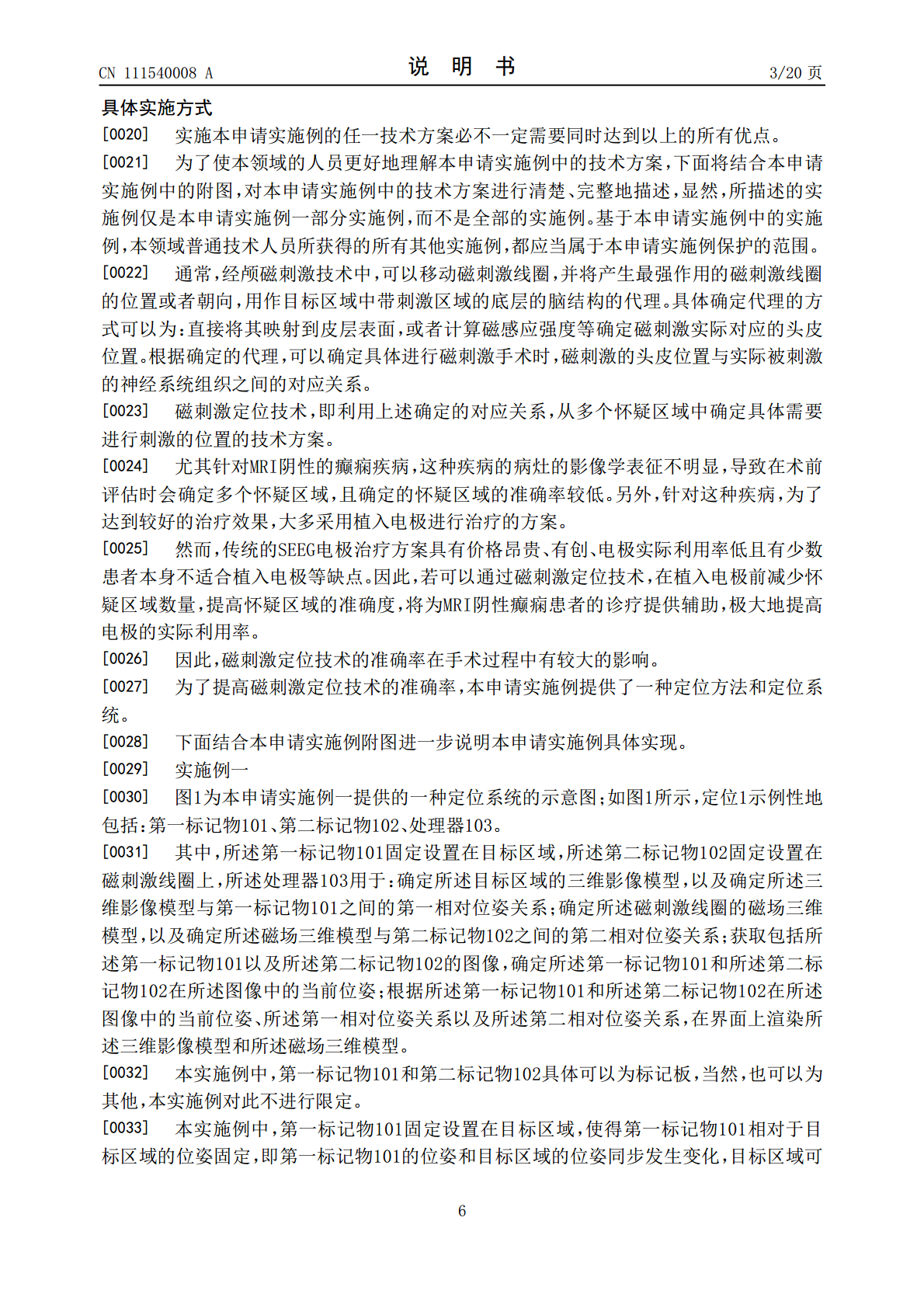
本申请提供一种定位方法、装置、系统、电子设备及存储介质,其中,定位方法,包括:确定目标区域的三维影像模型,以及确定三维影像模型与第一标记物之间的第一相对位姿关系,第一标记物固定设置在目标区域;确定磁刺激线圈的磁场三维模型,以及确定磁场三维模型与第二标记物之间的第二相对位姿关系,第二标记物固定设置在磁刺激线圈上;采集包括第一标记物以及第二标记物的图像,确定第一标记物和第二标记物在图像中的当前位姿;根据第一标记物和第二标记物在图像中的当前位姿、第一相对位姿关系以及第二相对位姿关系,在界面上渲染三维影像模型和磁
问题定位方法、装置、系统、存储介质及电子设备.pdf
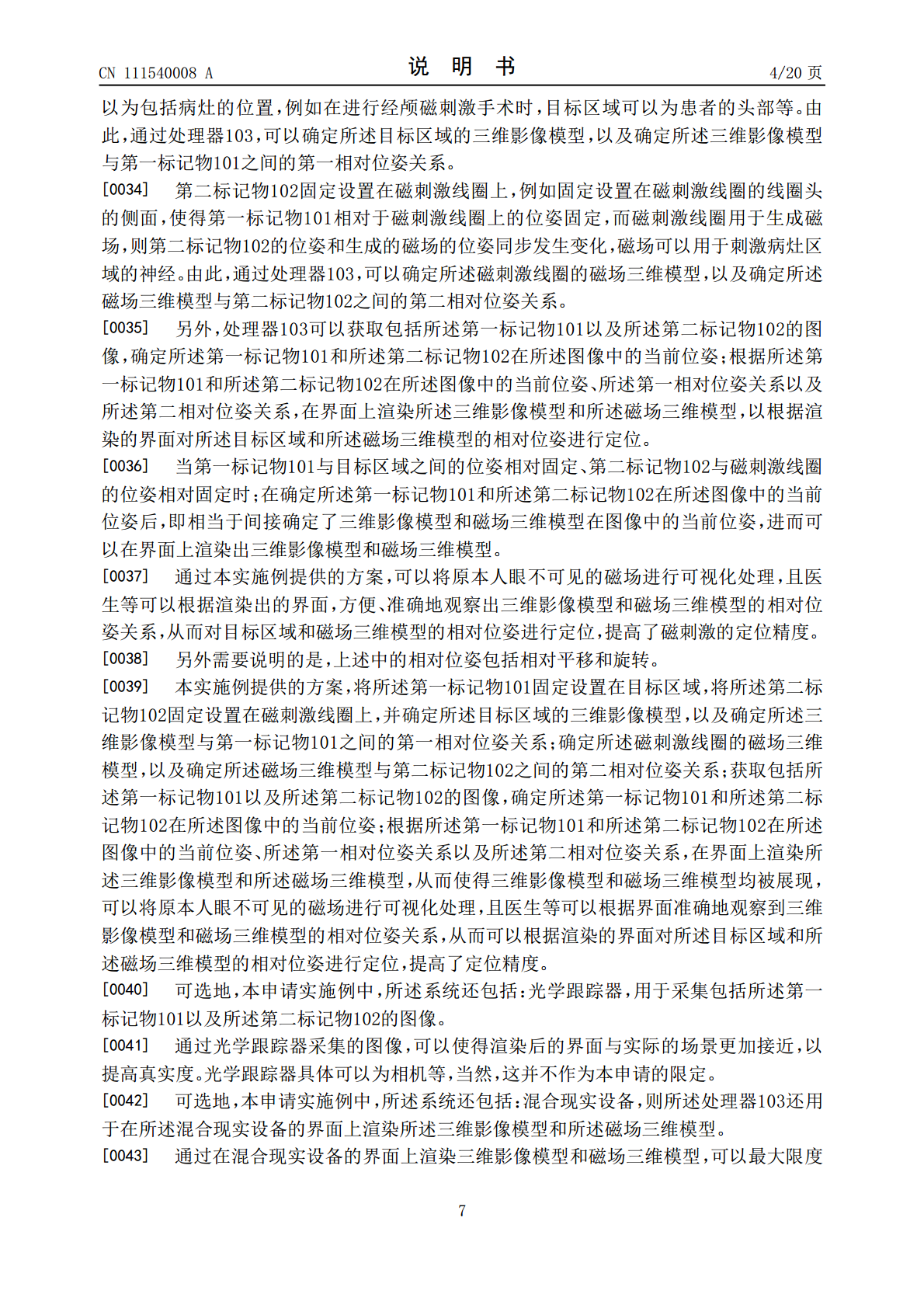
本公开涉及计算机技术领域,具体涉及一种问题定位方法、问题定位装置、问题定位系统、存储介质及电子设备。该问题定位方法包括采集全链路的业务数据以创建业务关键字与业务请求索引之间的第一索引关系,以及所述业务请求索引与业务调用链路信息之间的第二索引关系;响应于目标业务关键字的查询请求,基于所述第一索引关系获取所述目标业务关键字对应的目标业务请求索引;基于所述第二索引关系获取所述目标业务请求索引对应的目标业务调用链路信息,以利用所述目标业务调用链路信息进行业务问题定位。本公开提供的问题定位方法,能够自动化、快速地返

台风定位方法、装置、系统、电子设备及存储介质.pdf
本发明公开了一种台风定位方法、装置、系统、电子设备及存储介质,方法包括获取台风的上一时刻地理位置信息和上一时刻卫星图像;确定上一时刻地理位置信息在上一时刻卫星图像中的第一像素坐标;以第一像素坐标为中心,在上一时刻卫星图像数据中取设定窗口大小的目标图像区域,并对目标图像区域进行旋转后得到多个旋转图像区域;分别将各个旋转图像区域与当前时刻卫星图像进行匹配,将匹配度最高的旋转图像区域的中心点确定为当前时刻第一台风位置;将当前时刻第一台风位置转换为当前时刻地理位置信息。本发明方案采用多种数据源,通过多源加权融合算

目标定位方法、装置、系统、存储介质及电子设备.pdf
本发明提供了一种目标定位方法、装置、系统、存储介质及电子设备,涉及目标定位技术领域,所述方法包括:获取所述第一终端的通信信号强度;判断所述通信信号强度是否小于预设强度阈值;当所述通信信号强度小于所述预设强度阈值时,获取所述第一终端的位置信息;发送所述位置信息至第二终端,以使所述第二终端基于所述位置信息对所述目标进行定位,获得所述目标的定位信息。本发明提供的技术方案,能够有效预防目标失联,且能够加快对失联目标的搜寻速度。
定位方法、装置、存储介质及电子设备.pdf
本申请公开了一种定位方法、装置、存储介质和电子设备,涉及定位技术领域,主要目的在于解决相关技术中UWB定位装置需要搭建有线电源网络给现场UWB基站供电、需要搭建有线数据网络和位于远端的解算服务器进行数据交换使得搭建工作较为繁琐的问题。其中,定位方法包括:解算服务器通过无线网络与UWB基站进行通信连接;其中,解算服务器和UWB基站均为可充电设备,解算服务器被配置为能够提供所述无线网络。上述方法。能够省去电源线、有线网络、有线电源网络连接线的设置,简化定位装置的搭建操作,大大降低了人力、物力和工时,有利于节约