
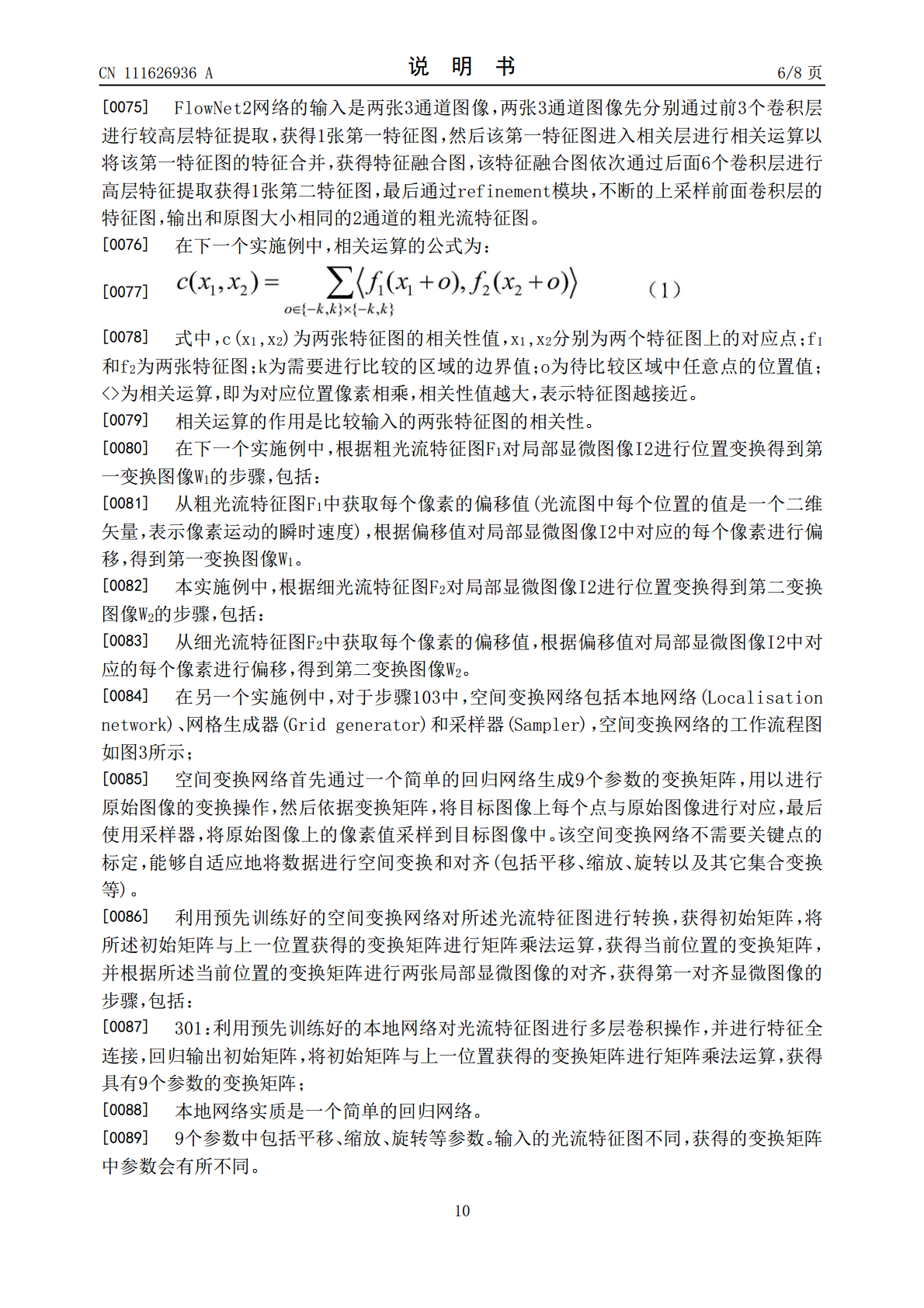
一种显微图像的快速全景拼接方法及系统.pdf

涵蓄****09

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种显微图像的快速全景拼接方法及系统.pdf
本发明公开一种显微图像的快速全景拼接方法,利用端到端的网络可实现由粗到细的光流估计,计算速度快,光流估计精准,完全能达到边图像采集边计算的要求;结合空间变换网络,该空间变换网络可直接从光流特征图中预测变换矩阵,并根据该变换矩阵对局部显微图像进行空间变换,使相邻局部显微图像的重叠区域精准对齐;然后采用渐入渐出的线性融合方式对对齐显微图像的重叠区域进行线性融合,可以有效的消除融合后图像的缝隙和重影,实现无缝拼接;最后利用双边滤波对全景融合显微图像进行全景渲染,以消除拼接后的融合缝隙生成无缝拼接图像。与现有技术
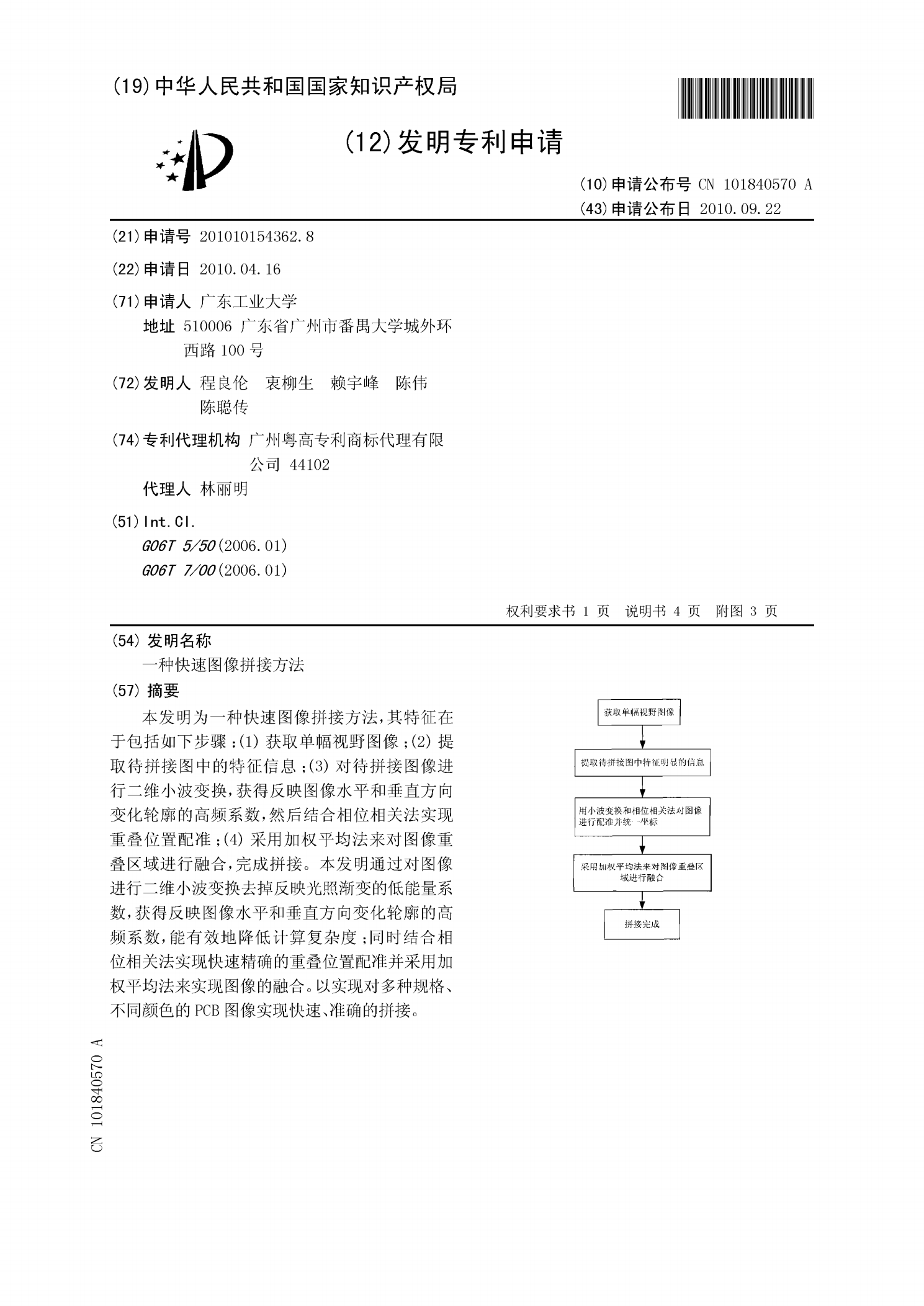
一种快速图像拼接方法.pdf
本发明为一种快速图像拼接方法,其特征在于包括如下步骤:(1)获取单幅视野图像;(2)提取待拼接图中的特征信息;(3)对待拼接图像进行二维小波变换,获得反映图像水平和垂直方向变化轮廓的高频系数,然后结合相位相关法实现重叠位置配准;(4)采用加权平均法来对图像重叠区域进行融合,完成拼接。本发明通过对图像进行二维小波变换去掉反映光照渐变的低能量系数,获得反映图像水平和垂直方向变化轮廓的高频系数,能有效地降低计算复杂度;同时结合相位相关法实现快速精确的重叠位置配准并采用加权平均法来实现图像的融合。以实现对多种规格
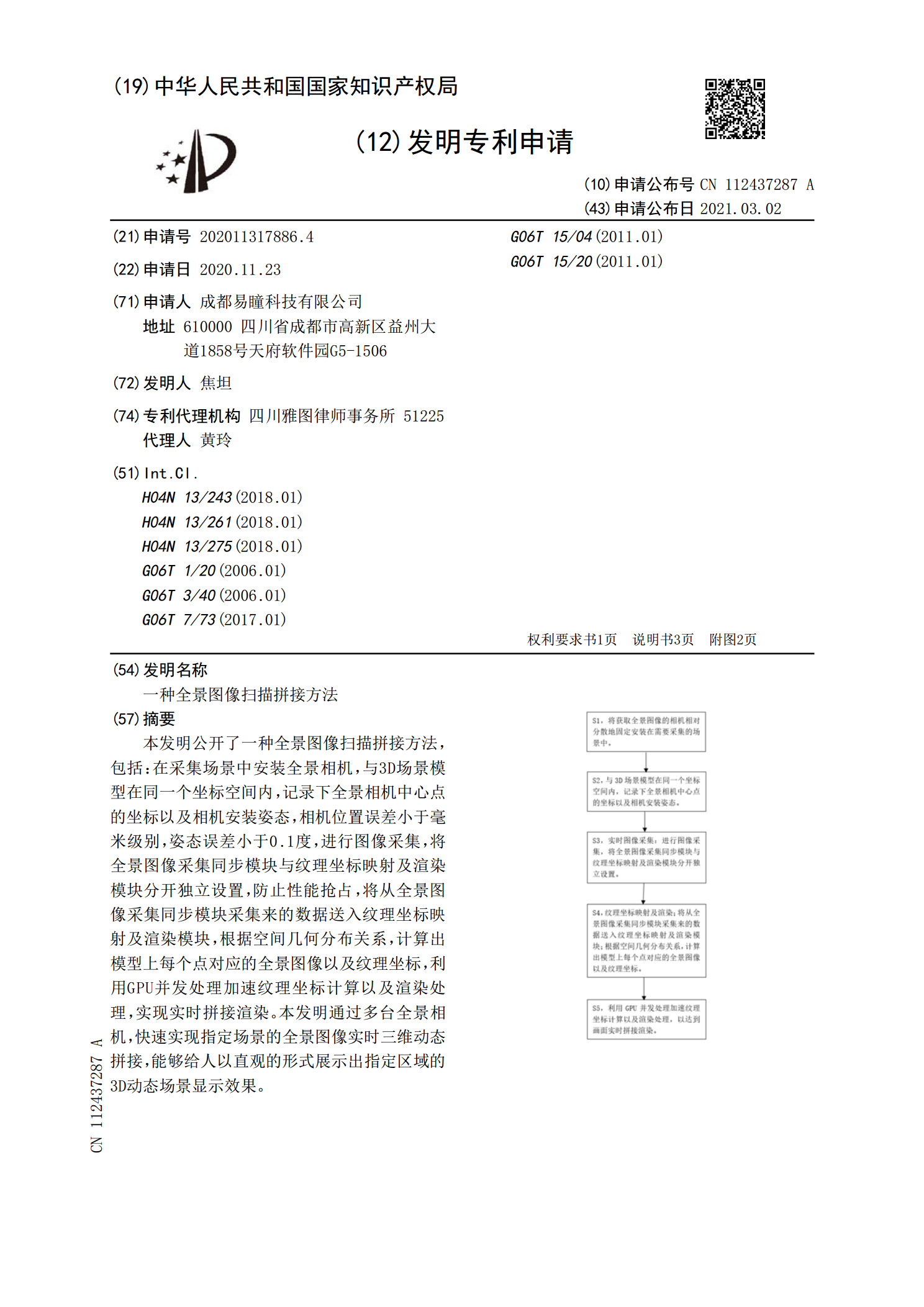
一种全景图像扫描拼接方法.pdf
本发明公开了一种全景图像扫描拼接方法,包括:在采集场景中安装全景相机,与3D场景模型在同一个坐标空间内,记录下全景相机中心点的坐标以及相机安装姿态,相机位置误差小于毫米级别,姿态误差小于0.1度,进行图像采集,将全景图像采集同步模块与纹理坐标映射及渲染模块分开独立设置,防止性能抢占,将从全景图像采集同步模块采集来的数据送入纹理坐标映射及渲染模块,根据空间几何分布关系,计算出模型上每个点对应的全景图像以及纹理坐标,利用GPU并发处理加速纹理坐标计算以及渲染处理,实现实时拼接渲染。本发明通过多台全景相机,快速
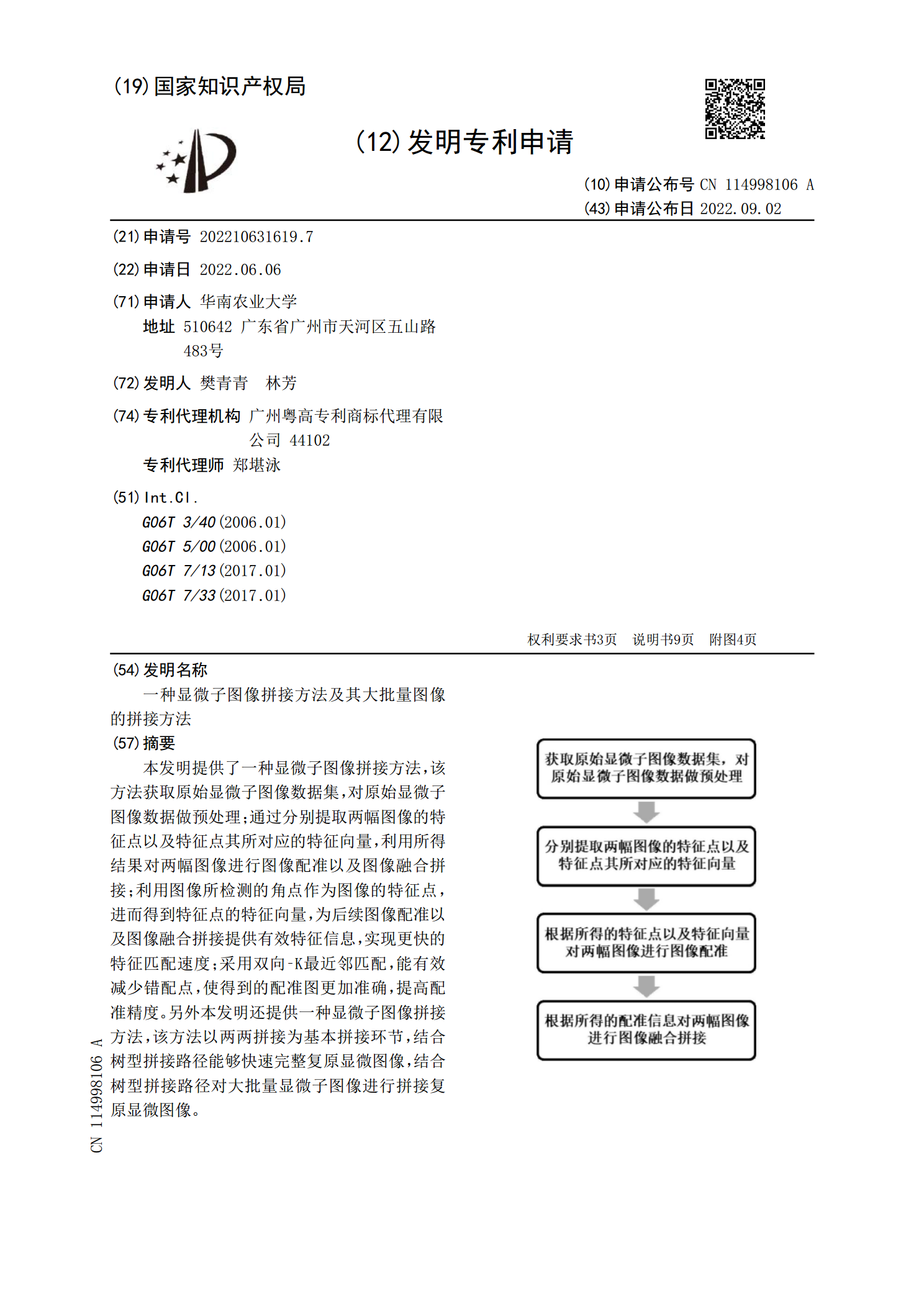
一种显微子图像拼接方法及其大批量图像的拼接方法.pdf
本发明提供了一种显微子图像拼接方法,该方法获取原始显微子图像数据集,对原始显微子图像数据做预处理;通过分别提取两幅图像的特征点以及特征点其所对应的特征向量,利用所得结果对两幅图像进行图像配准以及图像融合拼接;利用图像所检测的角点作为图像的特征点,进而得到特征点的特征向量,为后续图像配准以及图像融合拼接提供有效特征信息,实现更快的特征匹配速度;采用双向‑K最近邻匹配,能有效减少错配点,使得到的配准图更加准确,提高配准精度。另外本发明还提供一种显微子图像拼接方法,该方法以两两拼接为基本拼接环节,结合树型拼接路

一种车载全景图像拼接质量在线拼接及改进方法.pdf
本发明公开了一种车载全景图像拼接质量在线拼接及改进方法,包括以下步骤:A、采用传统方法进行离线标定,并记录标定时特征点信息;B、根据生成的全景图像,通过评价函数计算俯视图与相邻图像重叠区域图像错位情况,若评价函数值高于预设阈值y,若是则跳转至步骤C,否则执行步骤E;C、对标定时保留下的原标定物特征点进行最优化搜索;D、根据C中调整的特征点信息重新计算单应性矩阵H及全景图映射表,然后跳转至B;E、对拼接的全景图像进行图像融合处理,输出全景图。本发明在一定程度避免了由于车载摄像头位姿发生变化产生全景图像中的错