
一种车载全景图像拼接质量在线拼接及改进方法.pdf

小沛****文章


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种车载全景图像拼接质量在线拼接及改进方法.pdf
本发明公开了一种车载全景图像拼接质量在线拼接及改进方法,包括以下步骤:A、采用传统方法进行离线标定,并记录标定时特征点信息;B、根据生成的全景图像,通过评价函数计算俯视图与相邻图像重叠区域图像错位情况,若评价函数值高于预设阈值y,若是则跳转至步骤C,否则执行步骤E;C、对标定时保留下的原标定物特征点进行最优化搜索;D、根据C中调整的特征点信息重新计算单应性矩阵H及全景图映射表,然后跳转至B;E、对拼接的全景图像进行图像融合处理,输出全景图。本发明在一定程度避免了由于车载摄像头位姿发生变化产生全景图像中的错
一种全景图像扫描拼接方法.pdf
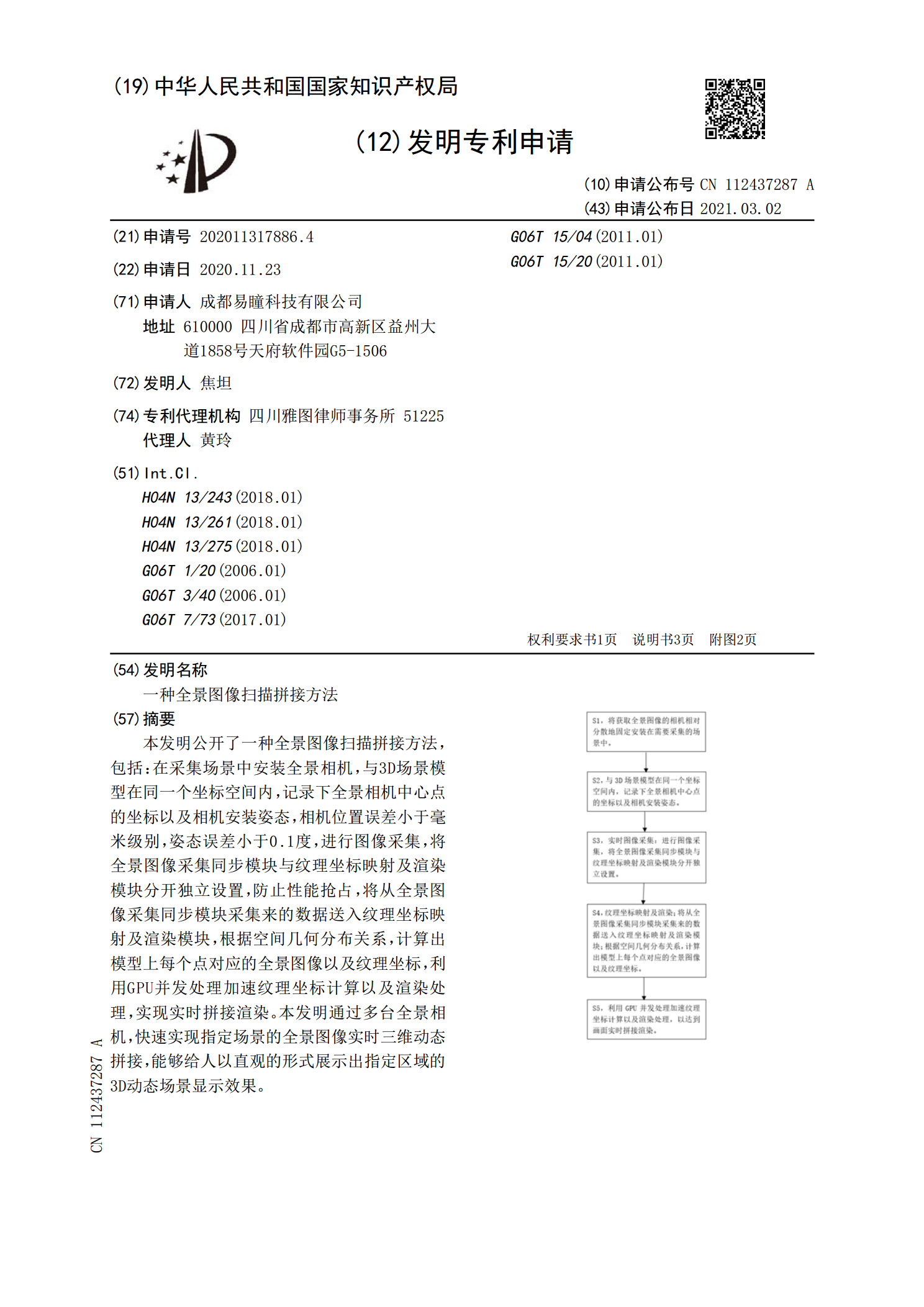
本发明公开了一种全景图像扫描拼接方法,包括:在采集场景中安装全景相机,与3D场景模型在同一个坐标空间内,记录下全景相机中心点的坐标以及相机安装姿态,相机位置误差小于毫米级别,姿态误差小于0.1度,进行图像采集,将全景图像采集同步模块与纹理坐标映射及渲染模块分开独立设置,防止性能抢占,将从全景图像采集同步模块采集来的数据送入纹理坐标映射及渲染模块,根据空间几何分布关系,计算出模型上每个点对应的全景图像以及纹理坐标,利用GPU并发处理加速纹理坐标计算以及渲染处理,实现实时拼接渲染。本发明通过多台全景相机,快速
在线拼接全景影像的系统和方法.pdf
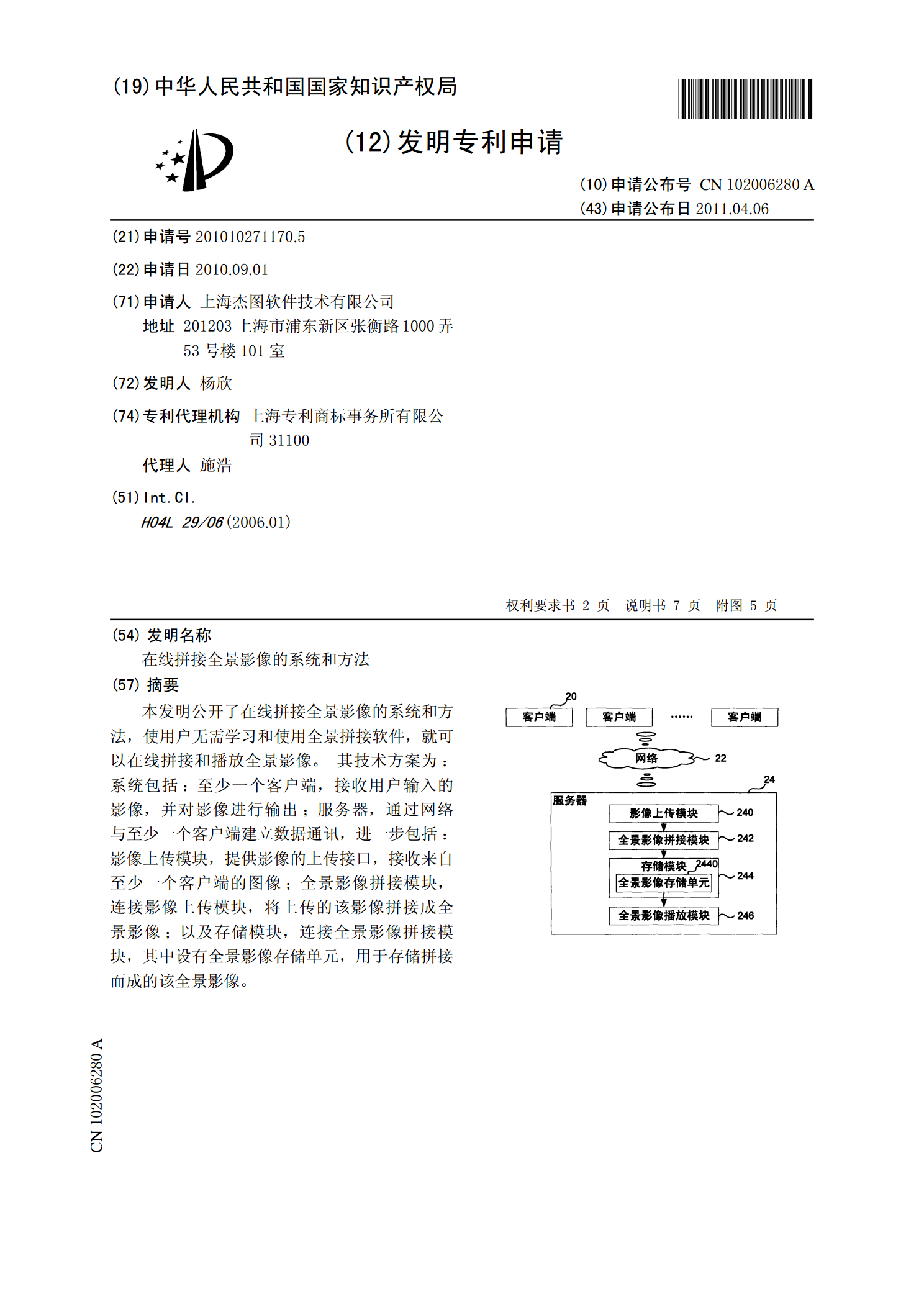
本发明公开了在线拼接全景影像的系统和方法,使用户无需学习和使用全景拼接软件,就可以在线拼接和播放全景影像。其技术方案为:系统包括:至少一个客户端,接收用户输入的影像,并对影像进行输出;服务器,通过网络与至少一个客户端建立数据通讯,进一步包括:影像上传模块,提供影像的上传接口,接收来自至少一个客户端的图像;全景影像拼接模块,连接影像上传模块,将上传的该影像拼接成全景影像;以及存储模块,连接全景影像拼接模块,其中设有全景影像存储单元,用于存储拼接而成的该全景影像。

一种基于改进图像融合的图像拼接方法.pdf
本发明涉及一种基于改进图像融合的图像拼接方法,主要解决现有技术中存在的实时性低,有拼接缝和伪影的技术问题,通过采用使用A‑KAZE算法对目标图像及参考图像分别进行特征点提取,建立特征描述子集合;构建KD‑tree,建立特征点数据索引,用双向KNN匹配算法匹配特征点,得到初始匹配结果,对初始匹配结果使用RANSAC算法剔除外点保留内点,完成图像配准;使用改进的基于拼接缝的拉普拉斯多分辨率融合算法进行图像融合,包括使用动态规划的方法寻找最优拼接缝,根据最优拼接缝限定融合范围,最后使用拉普拉斯多分辨率融合算法在

一种全景图像拼接渲染方法及装置.pdf
本发明提出一种全景图像拼接渲染方法及装置。一种全景图像拼接渲染方法,包括:获取待拼接渲染的鱼眼图像;对所述鱼眼图像进行顶点网格刨分处理,其中,顶点网格刨分精度与所述鱼眼图像的畸变程度成正比;根据对所述鱼眼图像的刨分结果,建立图像拼接渲染球型模型;将刨分后的所述鱼眼图像以及所述图像拼接渲染球型模型输入图形处理器渲染管线,将所述鱼眼图像拼接渲染为全景图像。上述技术方案对鱼眼图像进行切合畸变程度的刨分处理,然后以刨分后的图像进行拼接渲染得到全景图像,可以在保证渲染精度的前提下减少渲染顶点数,提高渲染效率。