
一种高精度仿真点云模型的生成方法.pdf

篷璐****爱吗


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种高精度仿真点云模型的生成方法.pdf
本发明公开了一种高精度仿真点云模型的生成方法,包括如下步骤:获取在机器人仿真软件中建立的生产线场景模型;在与生产线场景模型匹配的坐标系中,根据设定的光源位置,利用阴影映射法对生产线场景模型进行渲染,得到具有正确阴影关系的生产线场景模型;利用纹理贴图的方法对正确阴影关系的生产线场景模型进行渲染,得到该场景的虚拟投影;根据针孔成像模型,对虚拟投影进行场景图像采集;对采集的图像进行解码,计算空间点三维坐标生成仿真点云模型。本发明可以实现生成高精度的仿真点云模型,模型后续可用于对实际点云模型进行降噪处理。

一种新的点云模型控制网格的生成方法.docx
一种新的点云模型控制网格的生成方法点云模型控制网格的生成方法点云是一种基于三维坐标的离散数据表示方法,其在计算机视觉、机器人、虚拟现实等领域有广泛应用。与表面网格模型相比,点云模型更直观、更直观,但也存在着一些困难,其中之一就是点云的几何形态特征的难以捕捉。构建控制网格是将点云转换为网格模型的重要工作之一,一般来说,控制网格是为了方便使用和处理而在点云数据上构建的一种连续、有序、结构化的网格。本文提出一种新的点云模型控制网格的生成方法,该方法基于点云的结构特征和统计判定规则,旨在准确地捕捉点云的几何信息,
一种基于点云数据生成网格模型的方法、装置、设备及介质.pdf
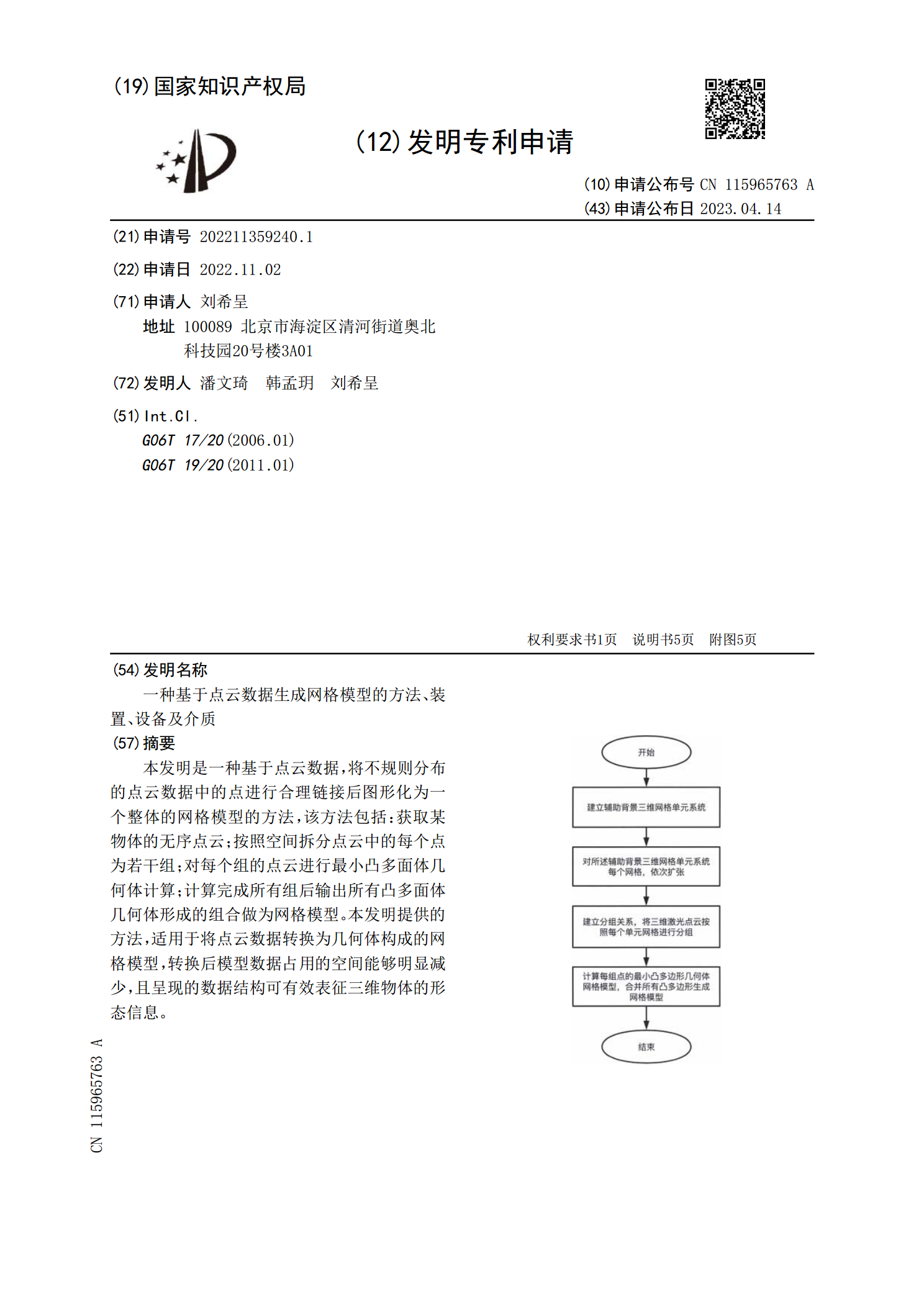
本发明是一种基于点云数据,将不规则分布的点云数据中的点进行合理链接后图形化为一个整体的网格模型的方法,该方法包括:获取某物体的无序点云;按照空间拆分点云中的每个点为若干组;对每个组的点云进行最小凸多面体几何体计算;计算完成所有组后输出所有凸多面体几何体形成的组合做为网格模型。本发明提供的方法,适用于将点云数据转换为几何体构成的网格模型,转换后模型数据占用的空间能够明显减少,且呈现的数据结构可有效表征三维物体的形态信息。

一种基于深度生成模型的人体点云实时修复方法.pdf
本发明涉及人机协作技术领域,尤其涉及一种基于深度生成模型的人体点云实时修复方法。首先根据坐标系映射关系,将三维体感摄影机空间坐标系下的人体点云图转换为三维体感摄影机像素坐标系下的人体深度图;然后利用基于生成对抗网络的深度生成模型对人体深度图进行实时修复;最后借助三维体感摄影机内参以及坐标系映射关系,将修复后的像素坐标系下的人体深度图映射到空间坐标系下的人体点云图,达到人机协作环境下人体点云实时修复的目的。
一种基于方向模板的高精度快速点云生成算法.pdf
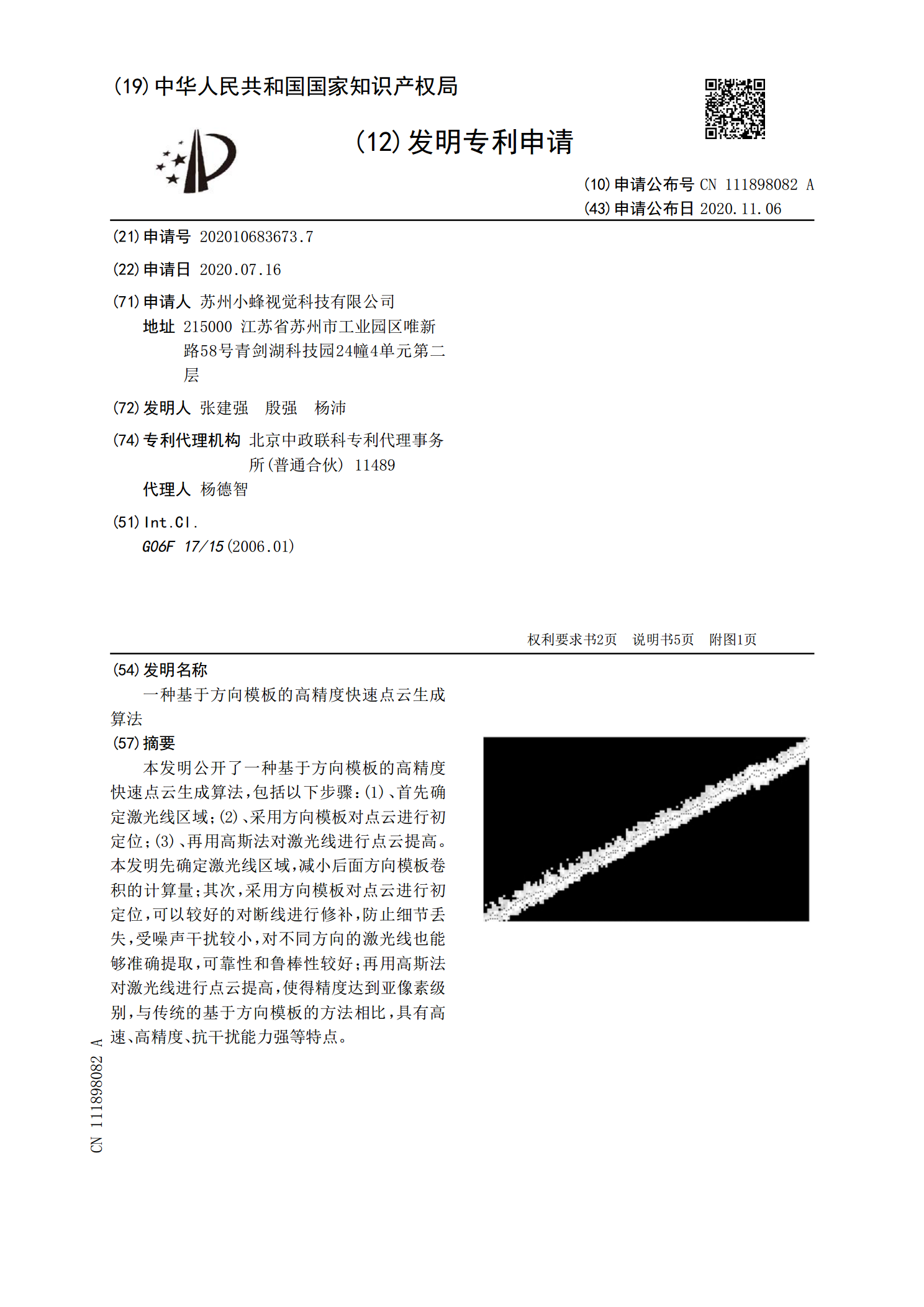
本发明公开了一种基于方向模板的高精度快速点云生成算法,包括以下步骤:(1)、首先确定激光线区域;(2)、采用方向模板对点云进行初定位;(3)、再用高斯法对激光线进行点云提高。本发明先确定激光线区域,减小后面方向模板卷积的计算量;其次,采用方向模板对点云进行初定位,可以较好的对断线进行修补,防止细节丢失,受噪声干扰较小,对不同方向的激光线也能够准确提取,可靠性和鲁棒性较好;再用高斯法对激光线进行点云提高,使得精度达到亚像素级别,与传统的基于方向模板的方法相比,具有高速、高精度、抗干扰能力强等特点。