
一种基于深度生成模型的人体点云实时修复方法.pdf

是丹****ni


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度生成模型的人体点云实时修复方法.pdf
本发明涉及人机协作技术领域,尤其涉及一种基于深度生成模型的人体点云实时修复方法。首先根据坐标系映射关系,将三维体感摄影机空间坐标系下的人体点云图转换为三维体感摄影机像素坐标系下的人体深度图;然后利用基于生成对抗网络的深度生成模型对人体深度图进行实时修复;最后借助三维体感摄影机内参以及坐标系映射关系,将修复后的像素坐标系下的人体深度图映射到空间坐标系下的人体点云图,达到人机协作环境下人体点云实时修复的目的。

基于TSDF模型的点云孔洞修复方法.docx
基于TSDF模型的点云孔洞修复方法基于TSDF模型的点云孔洞修复方法摘要:点云孔洞修复是三维重建和点云处理领域的重要问题之一。本文提出了一种基于TSDF(TruncatedSignedDistanceFunction)模型的点云孔洞修复方法。首先,我们通过TSDF模型对点云进行了表示和重建。然后,通过分析TSDF模型中的信息,我们识别出了点云中的孔洞。最后,我们使用插值和平滑的方法对孔洞进行修复。实验证明,我们的方法能够有效地修复点云中的孔洞,提升点云质量和准确性。关键词:点云,孔洞修复,TSDF模型,重

一种基于深度学习的超声图像生成3D点云模型的方法.pdf
本发明公开了一种基于深度学习的超声图像生成3D点云模型的方法,该方法通过以下步骤实现:将采集到的通信文件传输到计算机上,并通过还原像素进行解析,生成二维码数据;将所述二维码数据通过2D卷积运算在预定的视角生成2D投影;将所述2D投影生成密集的预测点云模型,并使用CAD建模生成真实点云模型;所述预测点云模型利用伪渲染计算出N个新视角下生成的像素化图像;计算每个新视角下所述伪渲染生成的图像和所述真实点云模型在相应同一视角下的2D投影图像之间的损失值,并求每个所述损失值的总和,根据所述总和进行反向传播优化。本发

基于点云模型的人体尺寸自动提取方法.docx
基于点云模型的人体尺寸自动提取方法基于点云模型的人体尺寸自动提取方法摘要:人体尺寸的自动提取在许多领域具有重要的应用。基于点云模型的人体尺寸自动提取方法通过对人体三维点云数据进行处理和分析,实现自动计算人体的各个尺寸参数。本文首先介绍了人体尺寸的重要性和现有方法的局限性,然后详细阐述了基于点云模型的人体尺寸自动提取的流程和关键技术,包括数据预处理、特征提取、尺寸计算和结果分析等。最后,通过实验验证了该方法的有效性和准确性。关键词:点云模型、人体尺寸、自动提取、数据处理、特征提取、尺寸计算1.引言人体尺寸是
一种基于点云数据生成网格模型的方法、装置、设备及介质.pdf
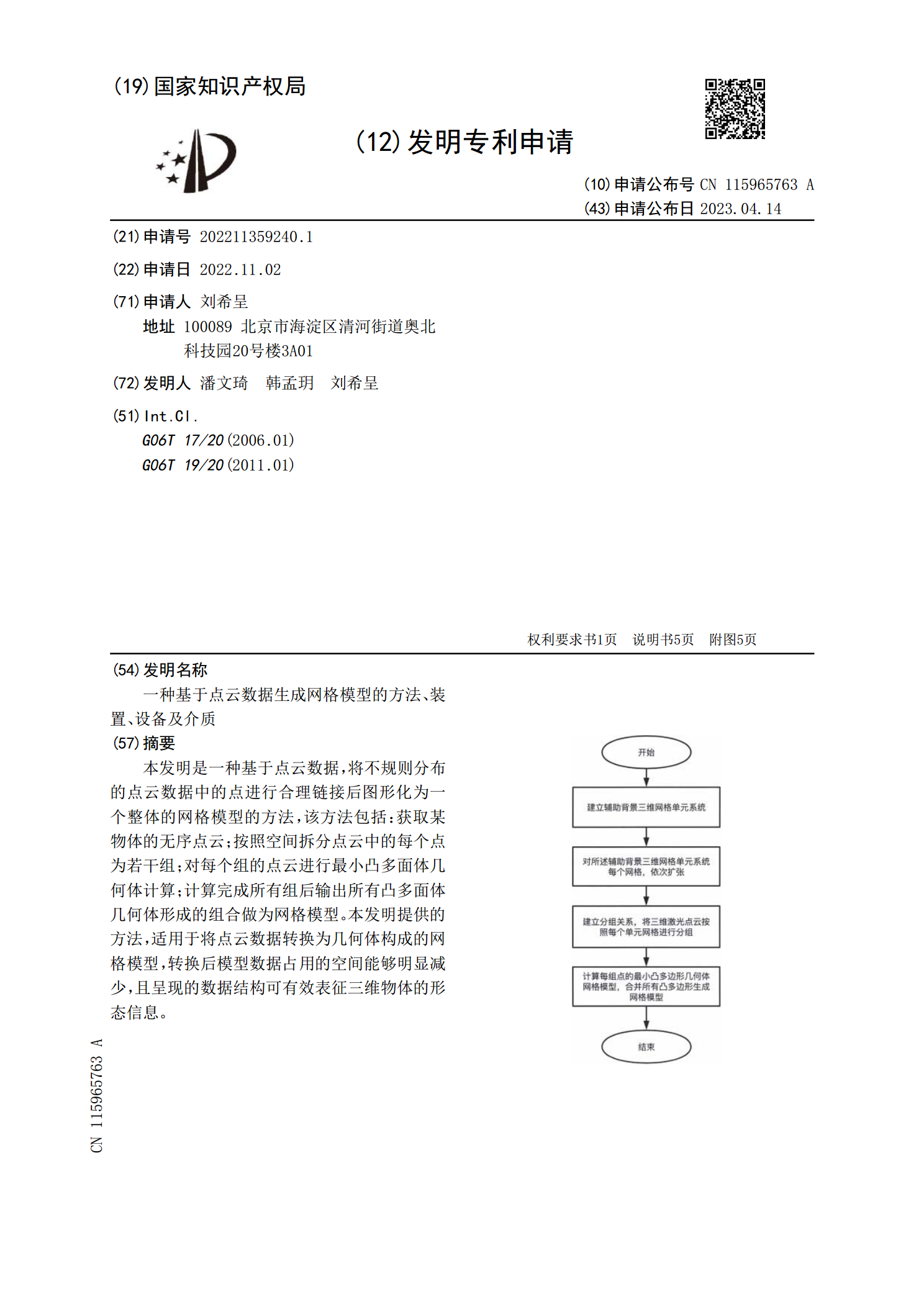
本发明是一种基于点云数据,将不规则分布的点云数据中的点进行合理链接后图形化为一个整体的网格模型的方法,该方法包括:获取某物体的无序点云;按照空间拆分点云中的每个点为若干组;对每个组的点云进行最小凸多面体几何体计算;计算完成所有组后输出所有凸多面体几何体形成的组合做为网格模型。本发明提供的方法,适用于将点云数据转换为几何体构成的网格模型,转换后模型数据占用的空间能够明显减少,且呈现的数据结构可有效表征三维物体的形态信息。