
基于边缘矫正的多相机渲染图像融合方法.pdf

猫巷****提格

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于边缘矫正的多相机渲染图像融合方法.pdf
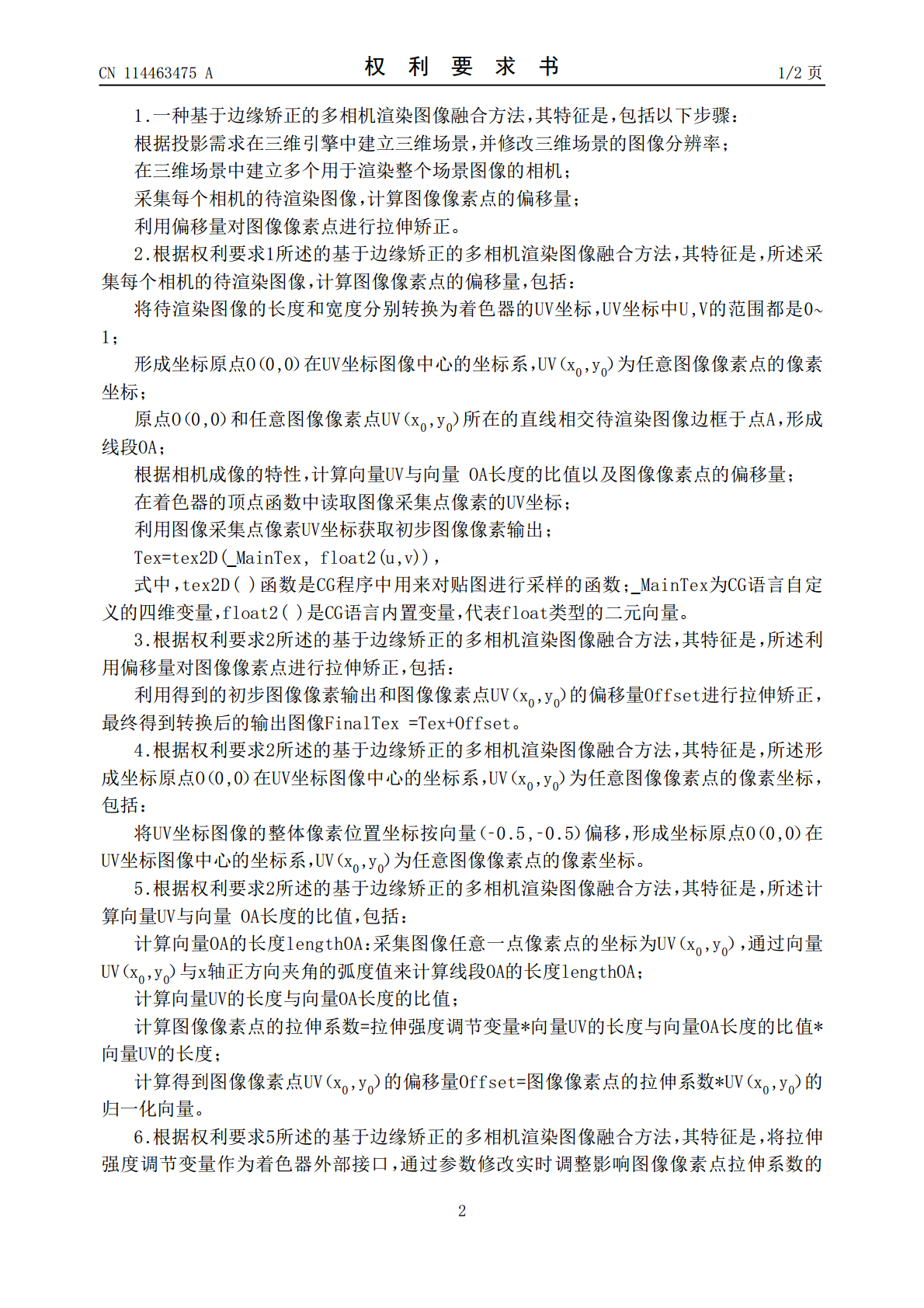
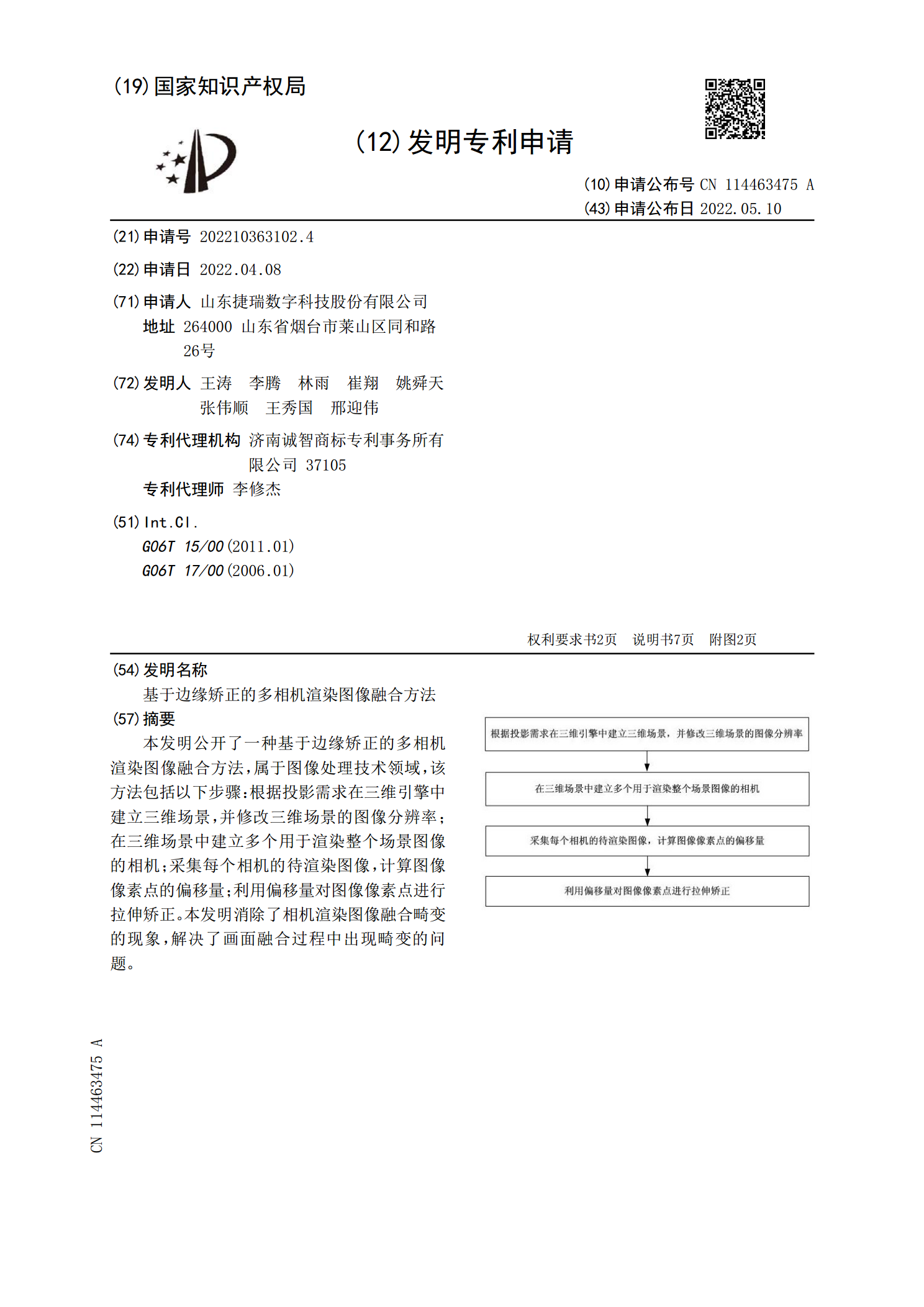
本发明公开了一种基于边缘矫正的多相机渲染图像融合方法,属于图像处理技术领域,该方法包括以下步骤:根据投影需求在三维引擎中建立三维场景,并修改三维场景的图像分辨率;在三维场景中建立多个用于渲染整个场景图像的相机;采集每个相机的待渲染图像,计算图像像素点的偏移量;利用偏移量对图像像素点进行拉伸矫正。本发明消除了相机渲染图像融合畸变的现象,解决了画面融合过程中出现畸变的问题。
基于单目相机重建的虚实融合渲染方法及装置.pdf
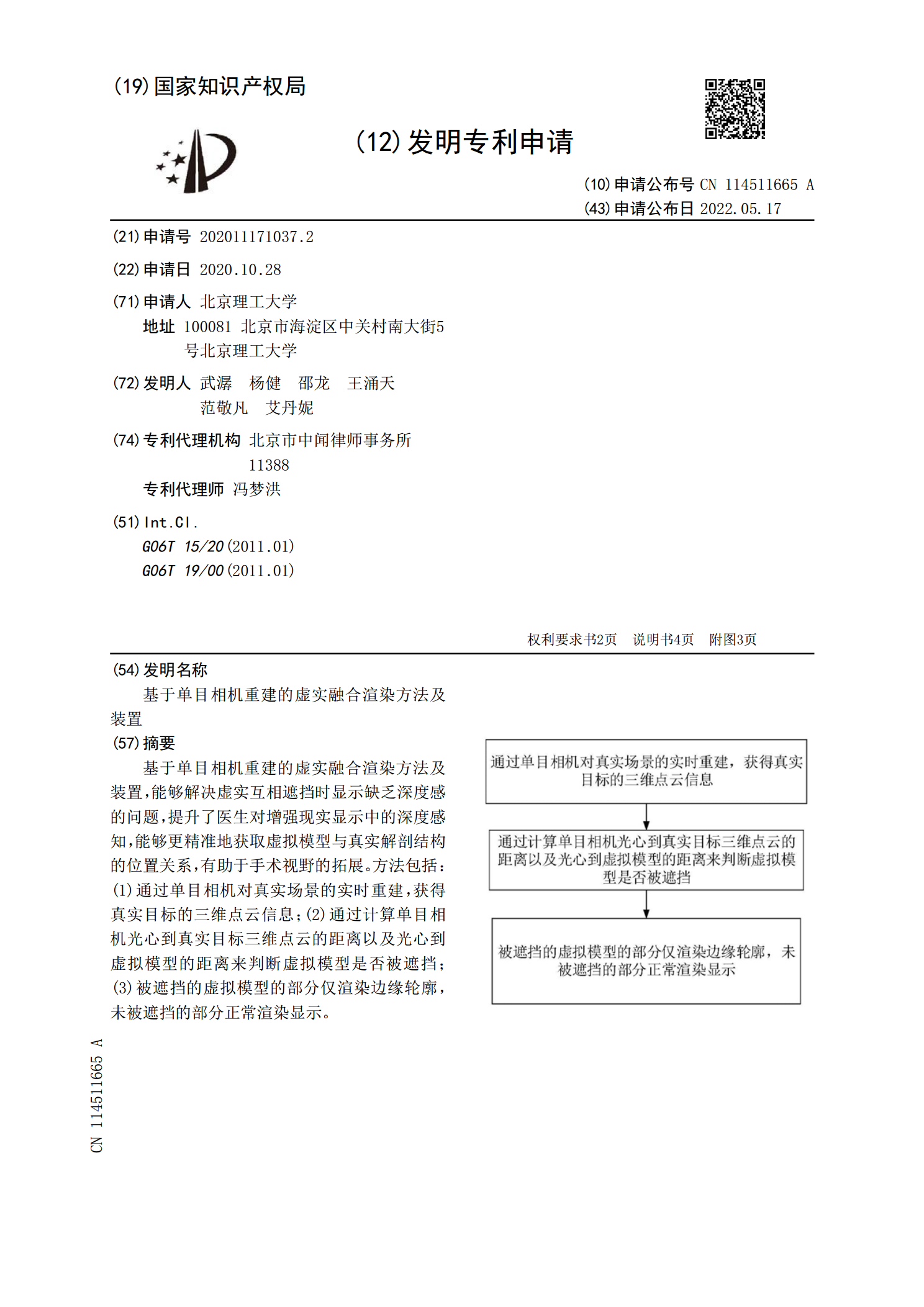
基于单目相机重建的虚实融合渲染方法及装置,能够解决虚实互相遮挡时显示缺乏深度感的问题,提升了医生对增强现实显示中的深度感知,能够更精准地获取虚拟模型与真实解剖结构的位置关系,有助于手术视野的拓展。方法包括:(1)通过单目相机对真实场景的实时重建,获得真实目标的三维点云信息;(2)通过计算单目相机光心到真实目标三维点云的距离以及光心到虚拟模型的距离来判断虚拟模型是否被遮挡;(3)被遮挡的虚拟模型的部分仅渲染边缘轮廓,未被遮挡的部分正常渲染显示。
使用多相机和深度相机阵列的基于图像的图像渲染方法和系统.pdf
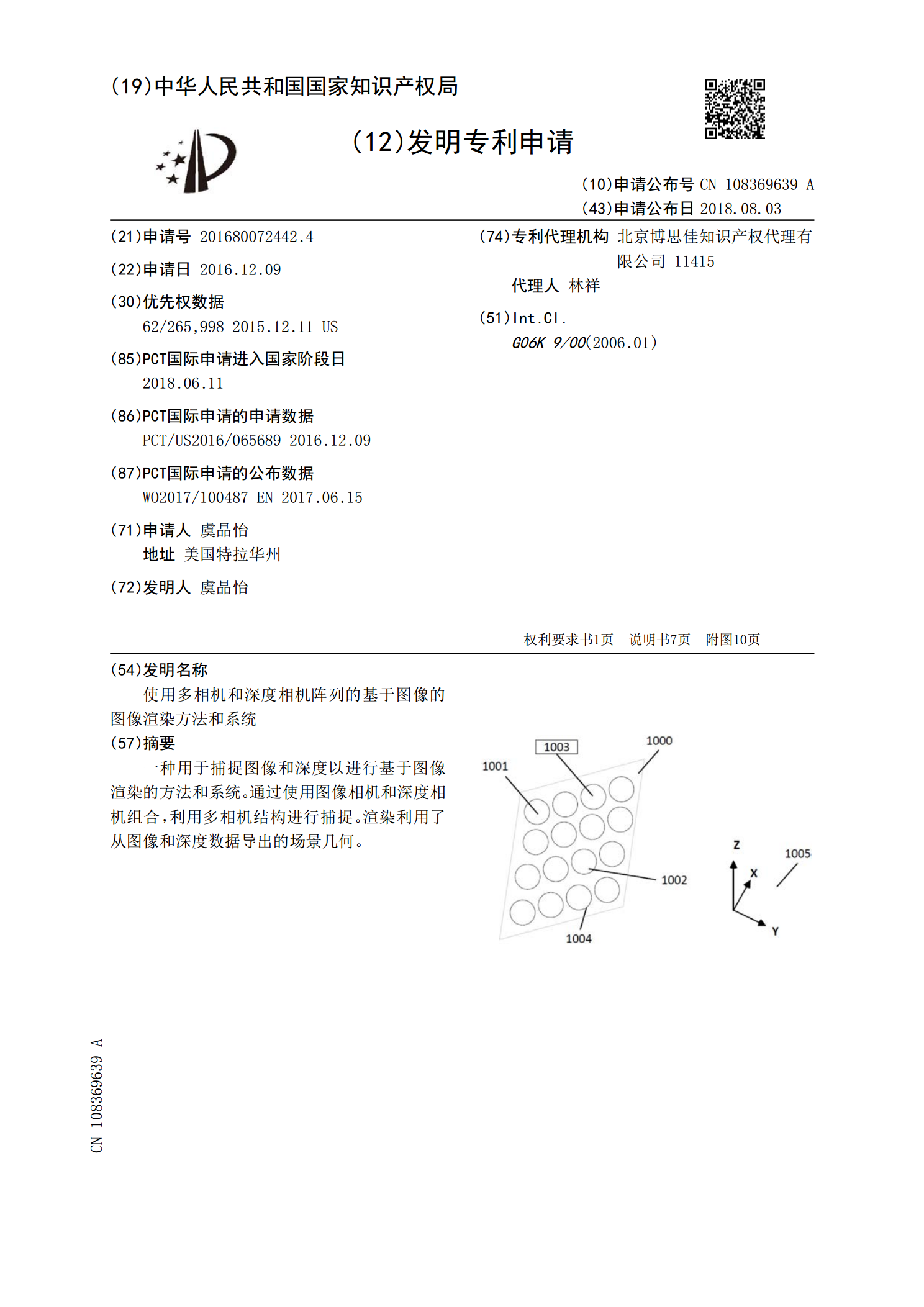
一种用于捕捉图像和深度以进行基于图像渲染的方法和系统。通过使用图像相机和深度相机组合,利用多相机结构进行捕捉。渲染利用了从图像和深度数据导出的场景几何。

一种基于边缘保留分解框架的多聚焦图像融合方法.pdf
本发明公开一种基于边缘保留分解框架的多聚焦图像融合方法,包括步骤一、获取源图像并编号,步骤二、边缘保留的图像分解框架的构建及源图像的分解,步骤三、平滑子带的融合,步骤四、细节子带的融合,步骤五、融合平滑子带和融合细节子带的图像重构;本发明通过构建边缘保留的图像分解框架,可有效地保留和锐化显著的边缘和脊,同时还可消除平滑子带中不需要的细节信息,并维护细节子带中的详细信息,根据平滑子带和细节子带各自的特点设计融合规则,可充分保留图像的结构和细节信息,使最终融合图像的融合效果更适合于人类的视觉感知。

基于多尺度信息融合的SAR图像边缘检测的综述报告.docx
基于多尺度信息融合的SAR图像边缘检测的综述报告随着卫星遥感技术的不断发展,合成孔径雷达(SAR)成像技术已经成为了一种非常重要的卫星遥感技术之一。由于SAR技术在遥感图像获取方面具有很高的分辨率和能力,因此在许多方面都得到了广泛的应用。其中,对SAR图像进行边缘检测是重要的研究领域之一。SAR图像边缘检测是一种对目标轮廓的识别和提取过程,在自然图像处理和计算机视觉领域也有着广泛的应用。基于SAR图像的边缘检测可以帮助我们更好地理解目标的外形和结构,并且也有助于我们更好地理解目标的物理特征。对于提取城市建