
一种机载激光点云数据与车载激光点云数据融合方法.pdf

曾琪****是我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机载激光点云数据与车载激光点云数据融合方法.pdf
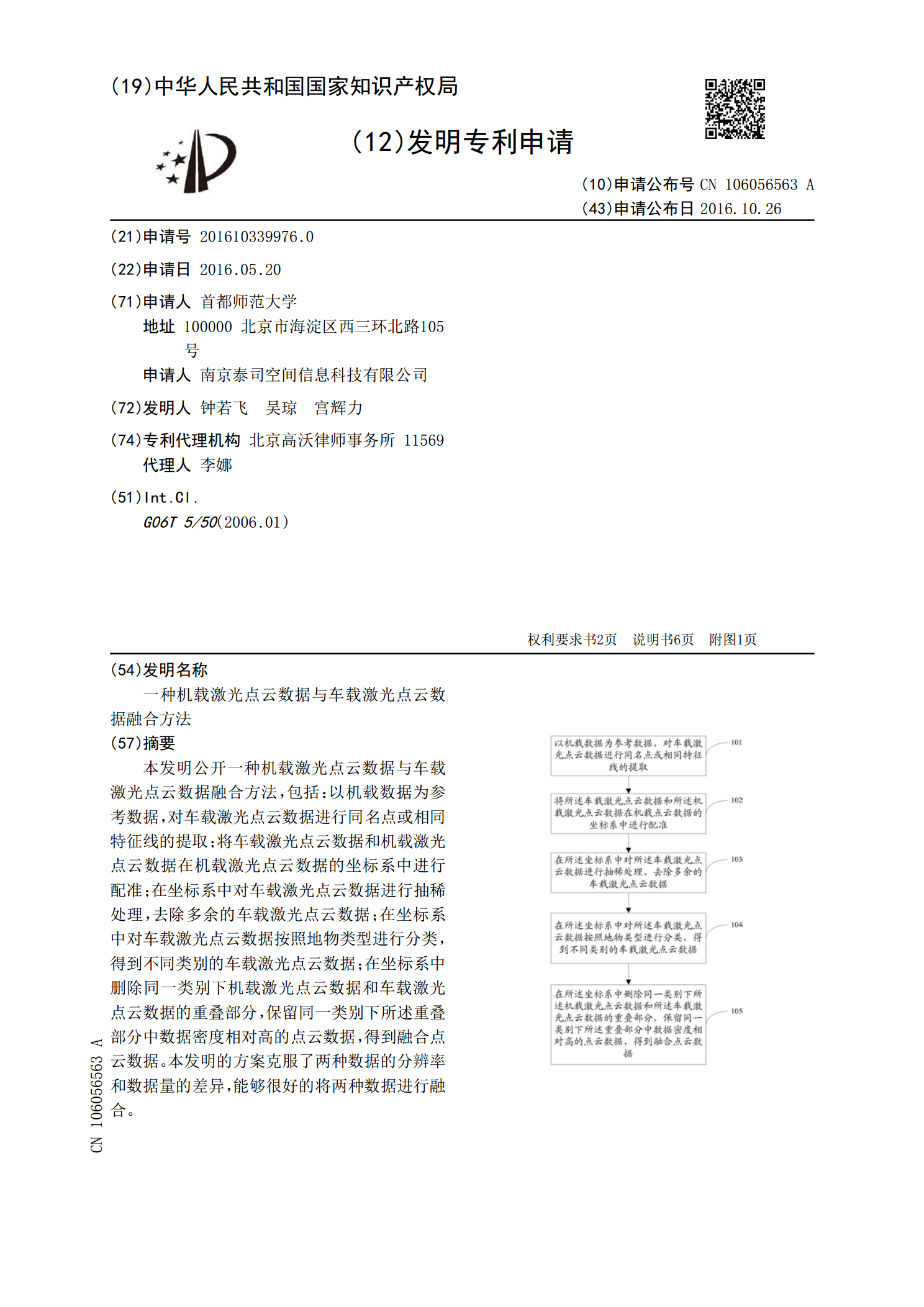
本发明公开一种机载激光点云数据与车载激光点云数据融合方法,包括:以机载数据为参考数据,对车载激光点云数据进行同名点或相同特征线的提取;将车载激光点云数据和机载激光点云数据在机载激光点云数据的坐标系中进行配准;在坐标系中对车载激光点云数据进行抽稀处理,去除多余的车载激光点云数据;在坐标系中对车载激光点云数据按照地物类型进行分类,得到不同类别的车载激光点云数据;在坐标系中删除同一类别下机载激光点云数据和车载激光点云数据的重叠部分,保留同一类别下所述重叠部分中数据密度相对高的点云数据,得到融合点云数据。本发明的

基于车载激光点云数据的路面检测与重建.docx
基于车载激光点云数据的路面检测与重建摘要:本文提出了一种基于车载激光点云数据的路面检测与重建方法。首先,通过对点云数据进行滤波处理,去除无用点云,然后针对道路特征,对点云数据进行特征提取。接着,采用分割算法对点云数据进行分割处理,进一步减小点云数据规模,提升计算效率。最后,通过三角网格化实现道路重建。关键词:车载激光点云数据;路面检测;重建;滤波;特征提取;分割算法;三角网格化一、引言近年来,随着自动驾驶、智能交通等领域的不断发展,对地图、路面等信息的精准识别和获取显得越来越重要。而车载激光雷达作为一种可

车载全景影像与激光点云数据配准方法研究.docx
车载全景影像与激光点云数据配准方法研究随着车载全景影像和激光点云数据的广泛应用,如何实现两种数据的精确配准成为了研究热点。本文将介绍车载全景影像和激光点云数据配准的基本原理和方法。一、车载全景影像与激光点云数据的特点车载全景影像是通过激光雷达和高清摄像头等传感器获取的场景全景影像,其具有短时间内获取大量数据、可视化效果好、信息量丰富等特点。而激光点云数据则是通过激光测距仪等设备获取目标表面上的三维坐标点云数据,其具有高精度、能够实现对目标的详细量化分析等优势。二、车载全景影像与激光点云数据配准的基本原理车
激光雷达及生成激光点云数据的方法.pdf
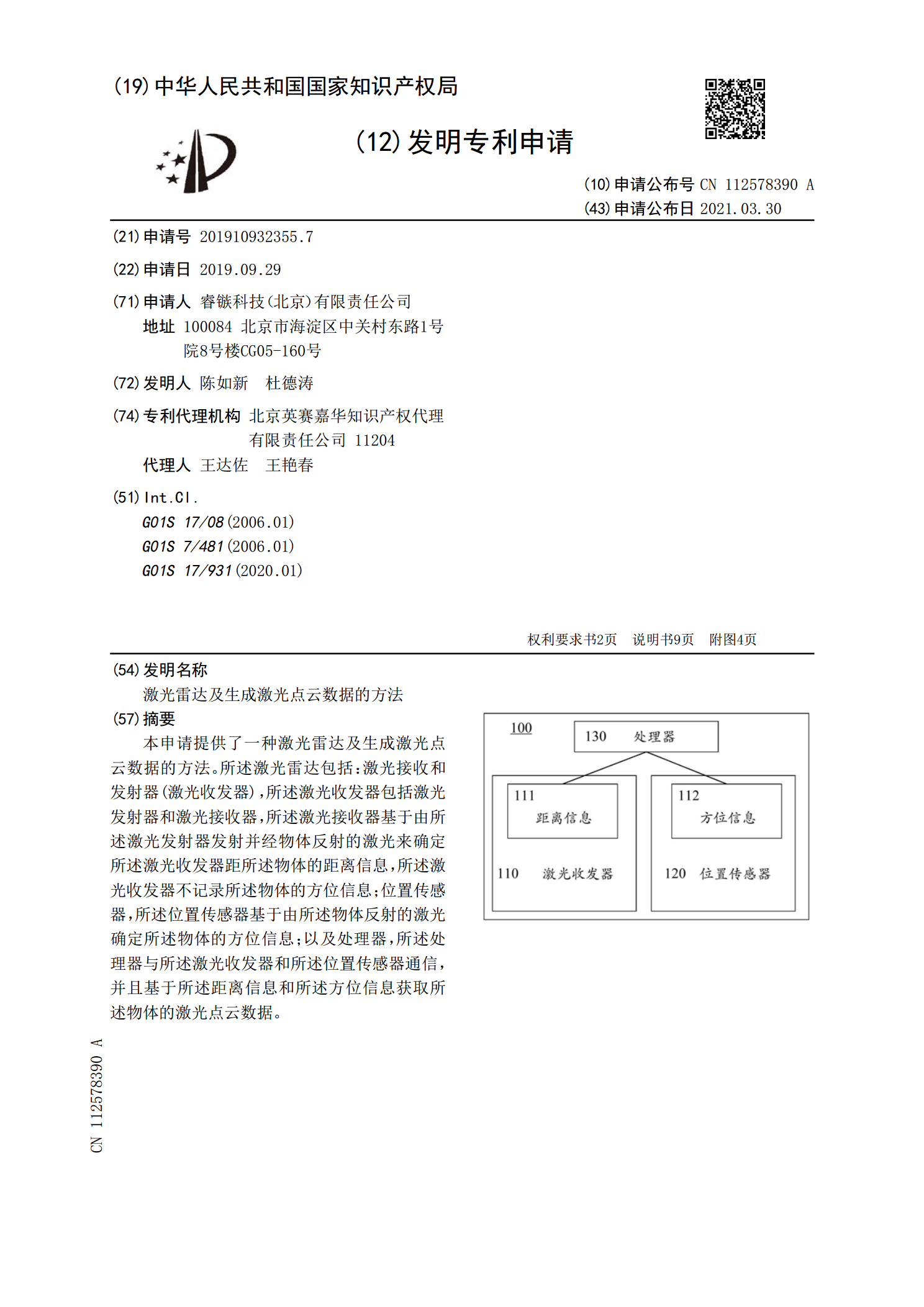
本申请提供了一种激光雷达及生成激光点云数据的方法。所述激光雷达包括:激光接收和发射器(激光收发器),所述激光收发器包括激光发射器和激光接收器,所述激光接收器基于由所述激光发射器发射并经物体反射的激光来确定所述激光收发器距所述物体的距离信息,所述激光收发器不记录所述物体的方位信息;位置传感器,所述位置传感器基于由所述物体反射的激光确定所述物体的方位信息;以及处理器,所述处理器与所述激光收发器和所述位置传感器通信,并且基于所述距离信息和所述方位信息获取所述物体的激光点云数据。
激光点云数据构建方法及系统.pdf
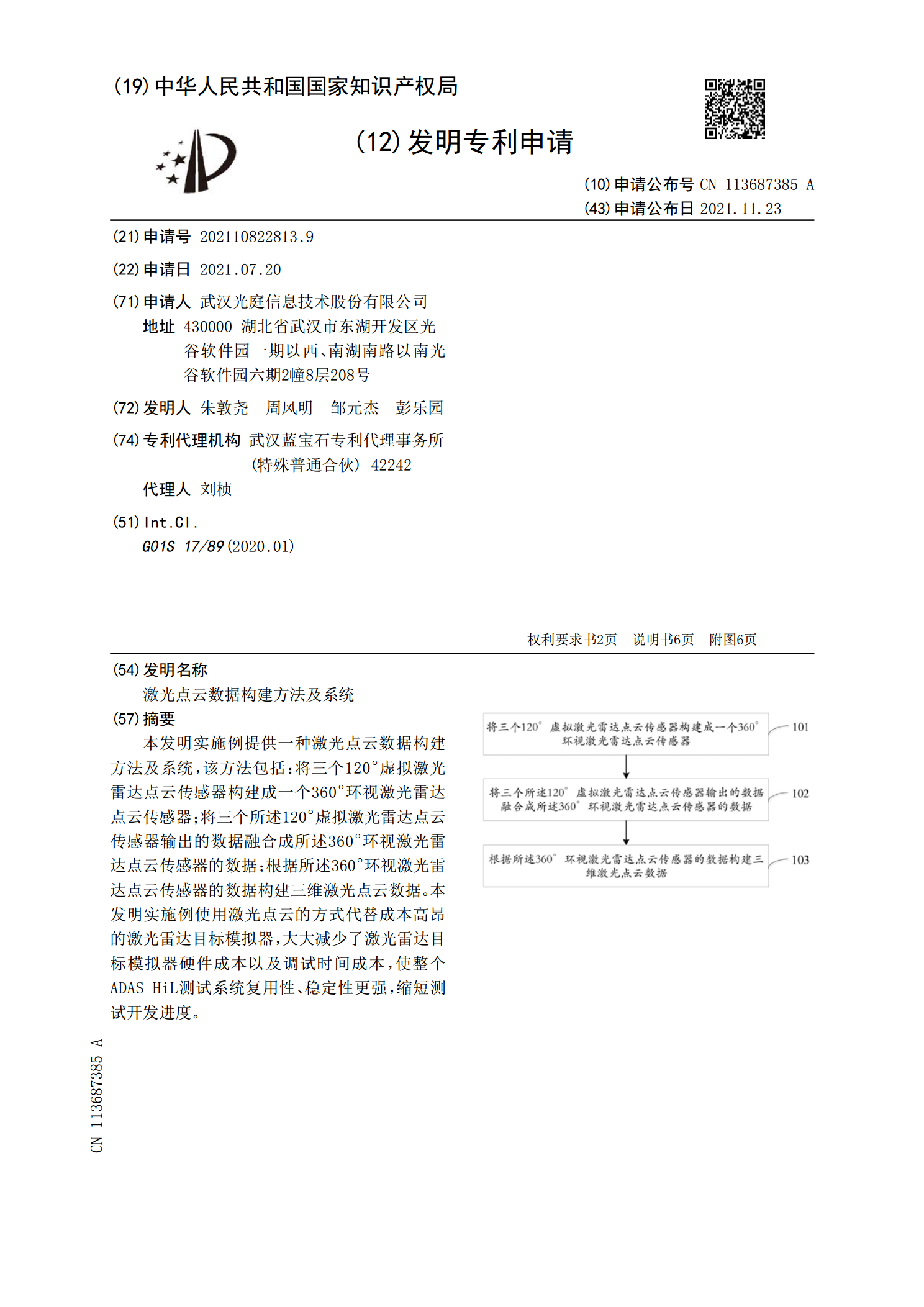
本发明实施例提供一种激光点云数据构建方法及系统,该方法包括:将三个120°虚拟激光雷达点云传感器构建成一个360°环视激光雷达点云传感器;将三个所述120°虚拟激光雷达点云传感器输出的数据融合成所述360°环视激光雷达点云传感器的数据;根据所述360°环视激光雷达点云传感器的数据构建三维激光点云数据。本发明实施例使用激光点云的方式代替成本高昂的激光雷达目标模拟器,大大减少了激光雷达目标模拟器硬件成本以及调试时间成本,使整个ADASHiL测试系统复用性、稳定性更强,缩短测试开发进度。