
一种对机器人运动的控制方法、装置、设备及机器人.pdf

哲妍****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种对机器人运动的控制方法、装置、设备及机器人.pdf
本发明实施例提供了一种对机器人运动的控制方法、装置、设备及机器人,该方法包括:确定机器人的当前工作状态;获取与当前工作状态对应的预设协调运动策略,其中,上述预设协调运动策略为:限定机器人的云台相对于底盘的转动角度不超过预设转动角度的策略;基于所获取的预设协调运动策略,控制机器人的云台和底盘配合运动。应用本发明实施例以实现机器人在运动过程中,其身体和头部之间协调配合动作,使得机器人更加人性化。

一种机器人运动控制的方法、运动控制装置及机器人系统.pdf
一种机器人运动控制的方法、运动控制装置(810)及机器人系统,用于提高机器人和外部传送带之间的同步精度,使机器人更准确地抓取外部传送带上的物体。该方法应用于运动控制装置(810),运动控制装置(810)包含有控制环和运动仿真模型,该方法包括:通过控制环获取传送带的实际运动参数,并根据实际运动参数和机器人上轮周期的第一运动参数生成模拟运动参数(201),第一运动参数由运动仿真模型生成并反馈,控制环用于接收运动仿真模型的反馈;通过运动仿真模型根据模拟运动参数生成机器人本轮周期的第二运动参数,并向控制环反馈第二

一种控制机器人运动的方法、装置及机器人.pdf
本发明适用于机器人技术领域,提供了一种控制机器人运动的方法、装置及机器人,其中,该控制机器人运动的方法包括判断所述机器人在运动方向上是否存在障碍物,若所述机器人在运动方向上存在障碍物,则确定所述障碍物的属性特征,根据确定的所述障碍物的属性特征,调整所述机器人的第一工作参数,控制所述机器人按照调整后的所述第一工作参数继续运动。本发明可以使机器人根据障碍物的属性特征来自适应地调整自身的工作参数,从而达到提早避开某些易被损坏障碍物的目的,有利于提高机器人的智能化程度。
机器人运动控制方法及装置、机器人控制设备和存储介质.pdf
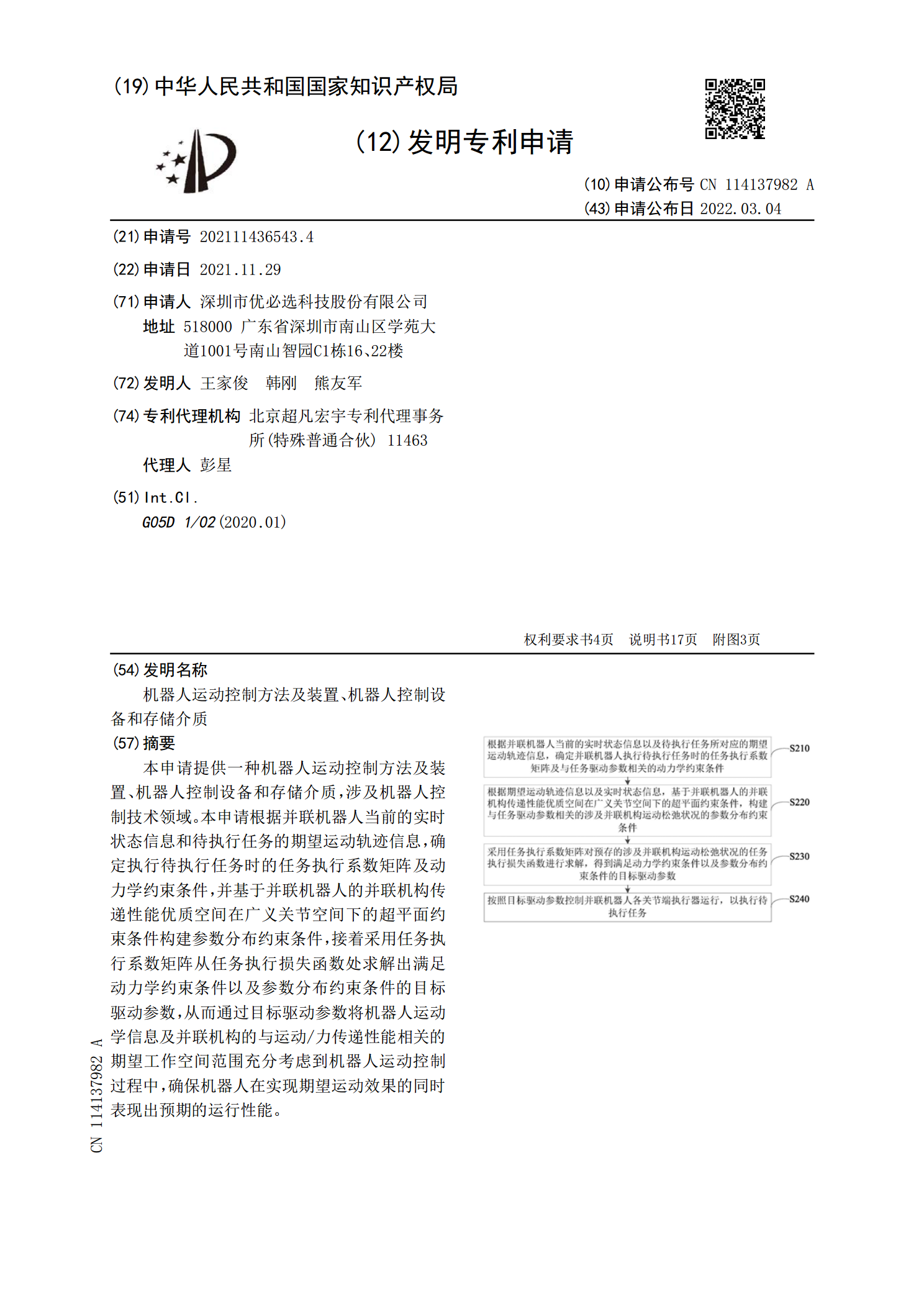
本申请提供一种机器人运动控制方法及装置、机器人控制设备和存储介质,涉及机器人控制技术领域。本申请根据并联机器人当前的实时状态信息和待执行任务的期望运动轨迹信息,确定执行待执行任务时的任务执行系数矩阵及动力学约束条件,并基于并联机器人的并联机构传递性能优质空间在广义关节空间下的超平面约束条件构建参数分布约束条件,接着采用任务执行系数矩阵从任务执行损失函数处求解出满足动力学约束条件以及参数分布约束条件的目标驱动参数,从而通过目标驱动参数将机器人运动学信息及并联机构的与运动/力传递性能相关的期望工作空间范围充分

机器人平滑运动控制方法、装置及机器人.pdf
本申请实施例提供了一种机器人平滑运动控制方法、装置及机器人,其中方法包括:检测机器人周围环境的障碍物;确定机器人的当前速度对应的观测距离,从观测距离获取多个预测采样点,根据预设平滑参数及机器人的加速度确定各预测采样点的预测速度;获取机器人的当前位姿,根据当前位姿确定各预测采样点的位姿;根据机器人的形状、各预测采样点的位姿、及障碍物判断障碍物与机器人是否碰撞;若障碍物与机器人碰撞,从各预测采样点中确定机器人与障碍物碰撞的目标预测采样点;根据目标预测采样点的上一采样点的预测速度确定机器人的安全速度。这样,确保