
模型训练和物体的定位方法及装置.pdf

一条****杉淑

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
模型训练和物体的定位方法及装置.pdf
本发明提出一种模型训练和物体的定位方法及装置,其中,方法包括:获取包含标注信息的训练样本图像,其中,训练样本图像包括第一合成图像,而第一合成图像是在真实环境下拍摄得到的第一真实图像,从第一真实图像中提取呈现有训练物体的局部图像,与背景图像进行合成得到的。采用训练样本图像对学习模型进行训练。通过对真实环境下拍摄得到的图像提取呈现有训练物体的局部图像,并将该局部图像与任意的背景图像合成作为训练样本图像,实现了仅需要对少量拍摄图像进行人工标注物体位置后,即可确定训练样本的标注,解决了现有技术中,训练样本图像需要
物体定位方法和装置.pdf
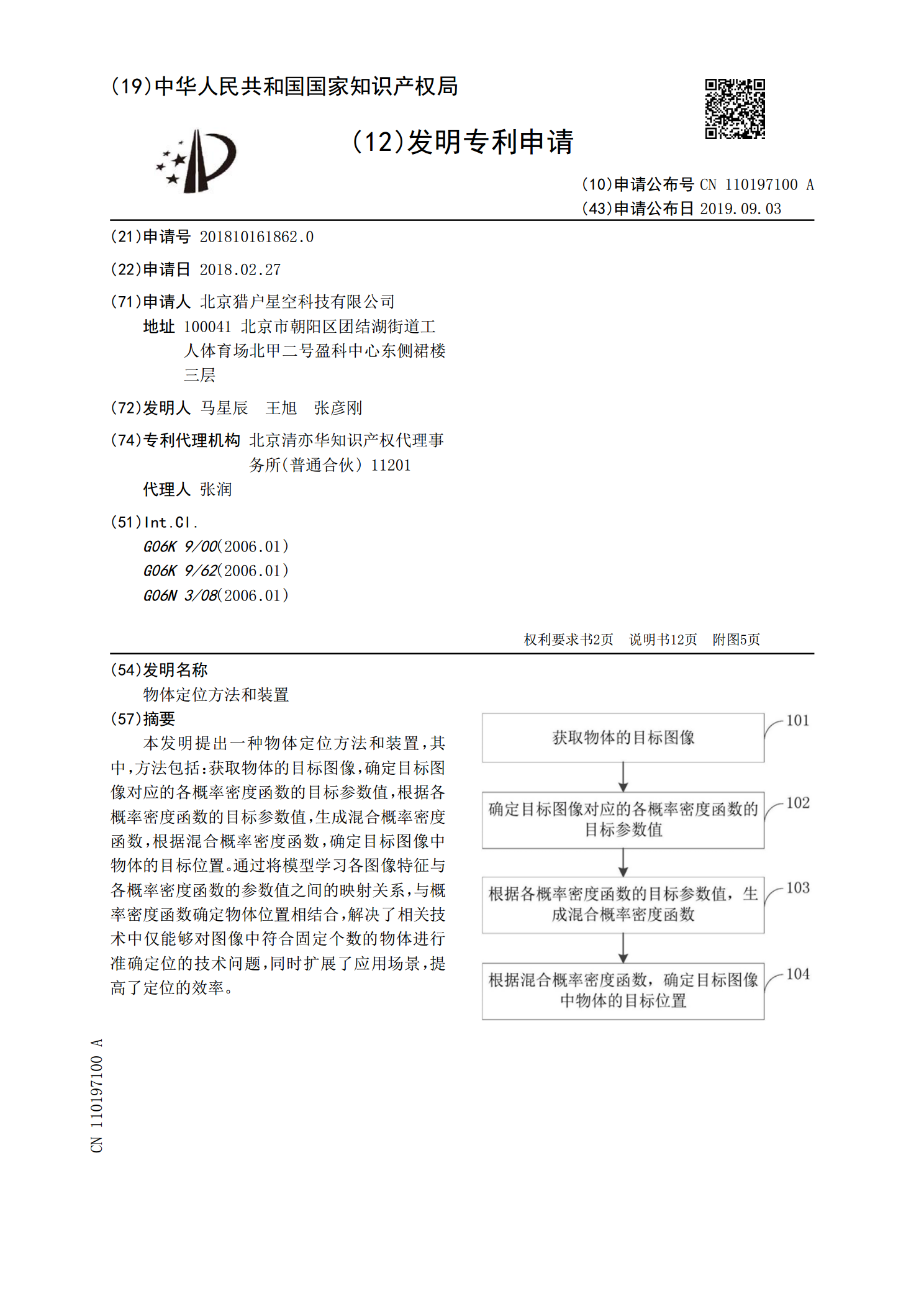
本发明提出一种物体定位方法和装置,其中,方法包括:获取物体的目标图像,确定目标图像对应的各概率密度函数的目标参数值,根据各概率密度函数的目标参数值,生成混合概率密度函数,根据混合概率密度函数,确定目标图像中物体的目标位置。通过将模型学习各图像特征与各概率密度函数的参数值之间的映射关系,与概率密度函数确定物体位置相结合,解决了相关技术中仅能够对图像中符合固定个数的物体进行准确定位的技术问题,同时扩展了应用场景,提高了定位的效率。
模型构建及训练方法和装置、时序动作定位方法和装置.pdf
本公开涉及一种模型构建及训练方法和装置、视频时序动作定位方法和装置。该模型训练方法包括:采用第一视频数据和第二视频数据对动作预知网络模型进行训练,使得训练完成的动作预知网络模型用于实现待测视频数据的时序动作定位,其中,第一视频数据为包含时域标注的长视频数据,第二视频数据为动作短片段视频数据,待测视频数据为不包含时域标注的长视频数据,第一视频数据的数量小于第二视频数据的数量。本公开通过一种适用于大规模动作类别的时序动作定位模型,可以成功将时序动作定位模型扩展到更广泛的动作类别集。
物体的定位方法、装置、介质和计算设备.pdf
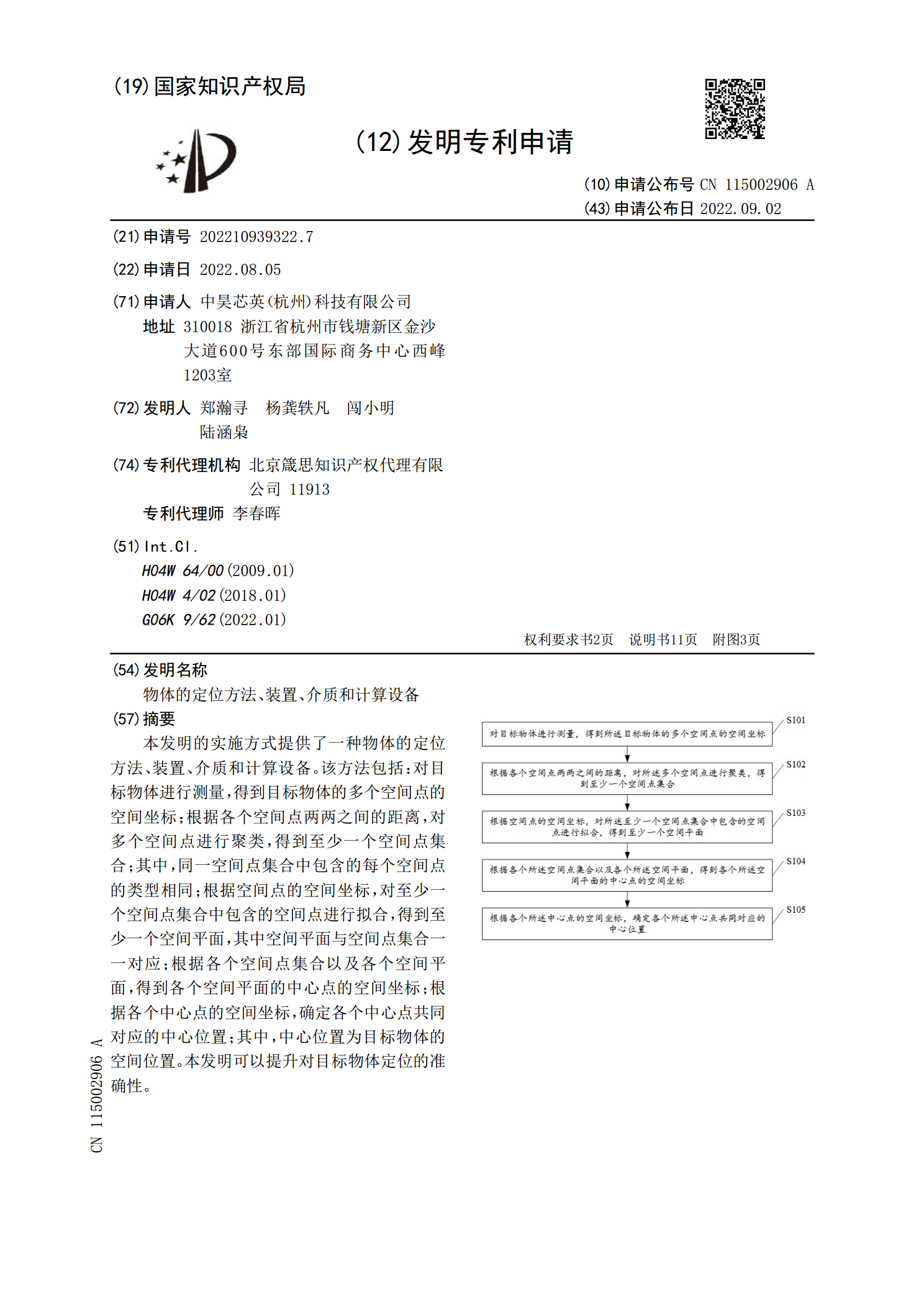
本发明的实施方式提供了一种物体的定位方法、装置、介质和计算设备。该方法包括:对目标物体进行测量,得到目标物体的多个空间点的空间坐标;根据各个空间点两两之间的距离,对多个空间点进行聚类,得到至少一个空间点集合;其中,同一空间点集合中包含的每个空间点的类型相同;根据空间点的空间坐标,对至少一个空间点集合中包含的空间点进行拟合,得到至少一个空间平面,其中空间平面与空间点集合一一对应;根据各个空间点集合以及各个空间平面,得到各个空间平面的中心点的空间坐标;根据各个中心点的空间坐标,确定各个中心点共同对应的中心位置
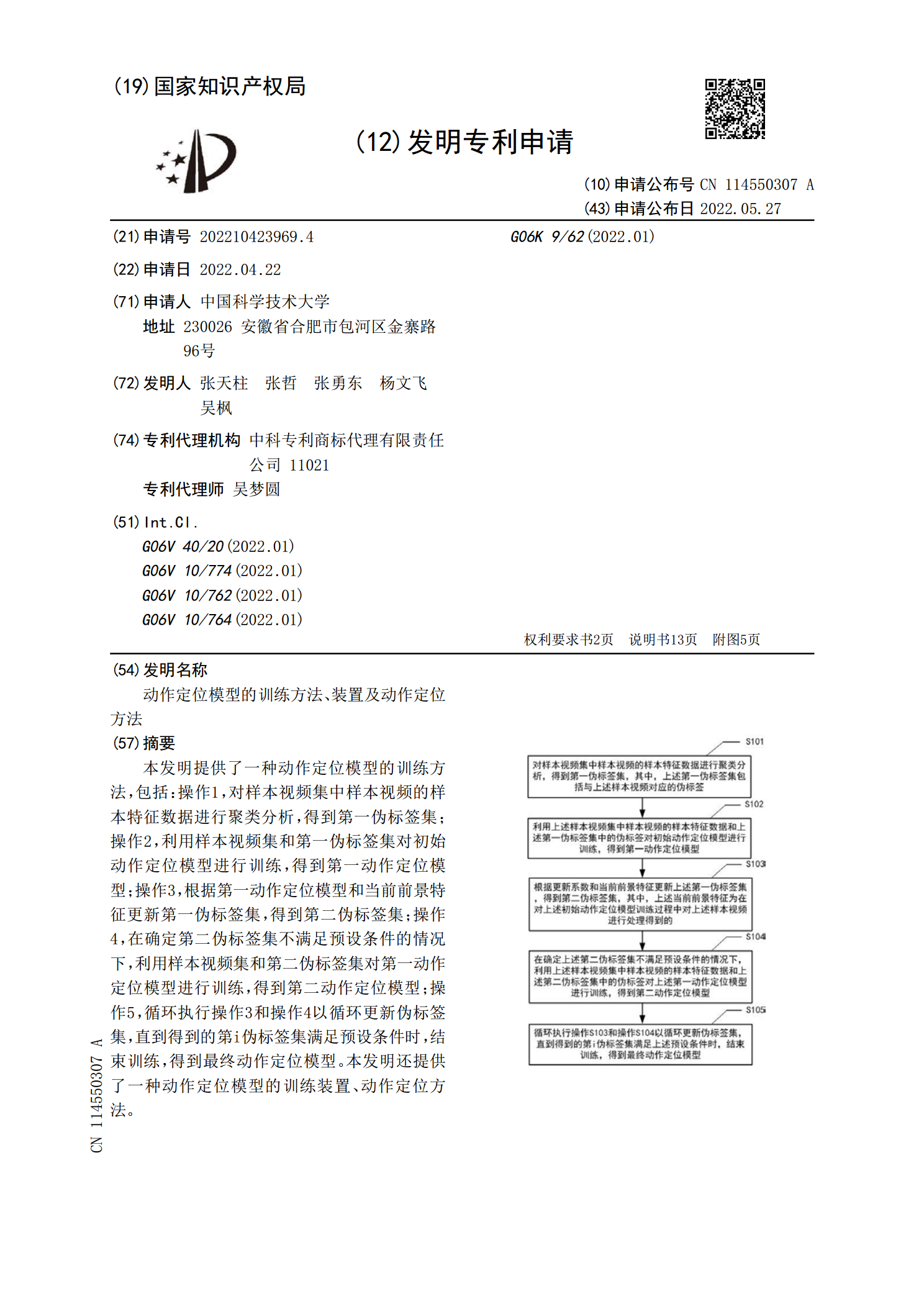
动作定位模型的训练方法、装置及动作定位方法.pdf
本发明提供了一种动作定位模型的训练方法,包括:操作1,对样本视频集中样本视频的样本特征数据进行聚类分析,得到第一伪标签集;操作2,利用样本视频集和第一伪标签集对初始动作定位模型进行训练,得到第一动作定位模型;操作3,根据第一动作定位模型和当前前景特征更新第一伪标签集,得到第二伪标签集;操作4,在确定第二伪标签集不满足预设条件的情况下,利用样本视频集和第二伪标签集对第一动作定位模型进行训练,得到第二动作定位模型;操作5,循环执行操作3和操作4以循环更新伪标签集,直到得到的第i伪标签集满足预设条件时,结束训练