
一种水陆两栖智能监控设备.pdf

努力****甲寅


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水陆两栖智能监控设备.pdf
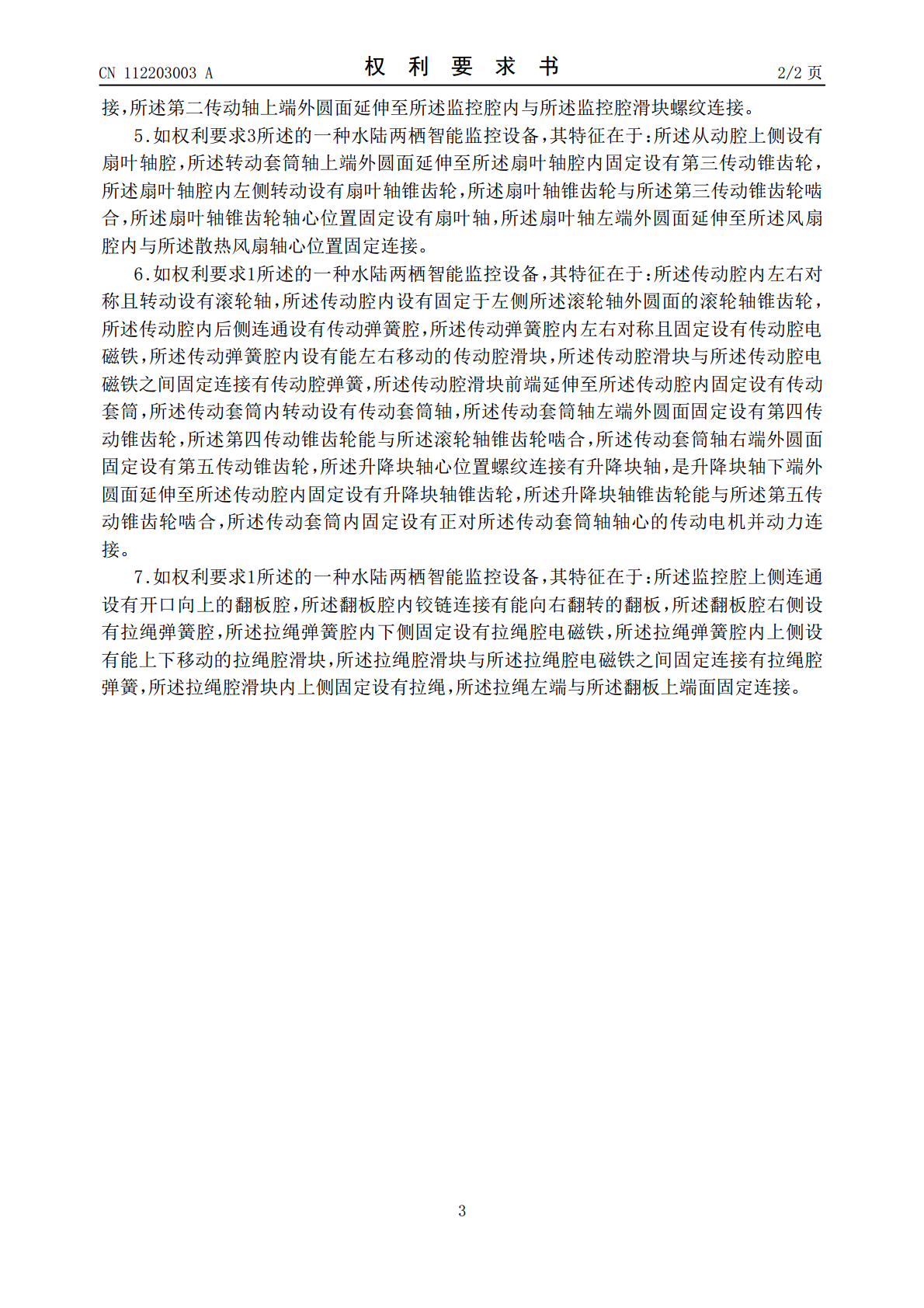
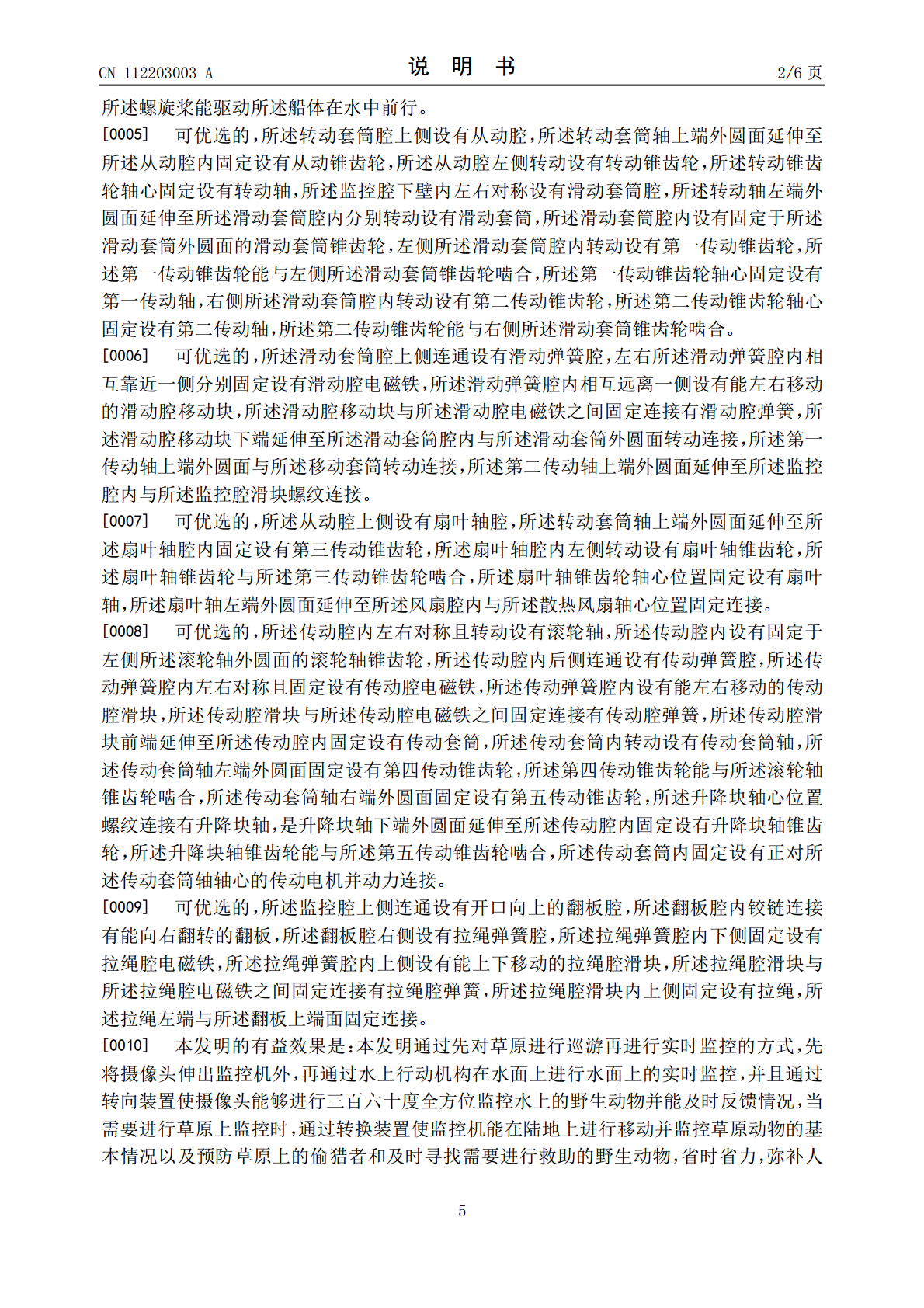
本发明公开的一种水陆两栖智能监控设备,包括监控机,所述监控机内设有监控腔,所述监控腔内设有监控装置,所述监控装置包括滑动设于所述监控腔内下侧的监控腔滑块,本发明通过先对草原进行巡游再进行实时监控的方式,先将摄像头伸出监控机外,再通过水上行动机构在水面上进行水面上的实时监控,并且通过转向装置使摄像头能够进行三百六十度全方位监控水上的野生动物并能及时反馈情况,当需要进行草原上监控时,通过转换装置使监控机能在陆地上进行移动并监控草原动物的基本情况以及预防草原上的偷猎者和及时寻找需要进行救助的野生动物,省时省力,
一种水陆两栖适变的监控探测智能车.pdf
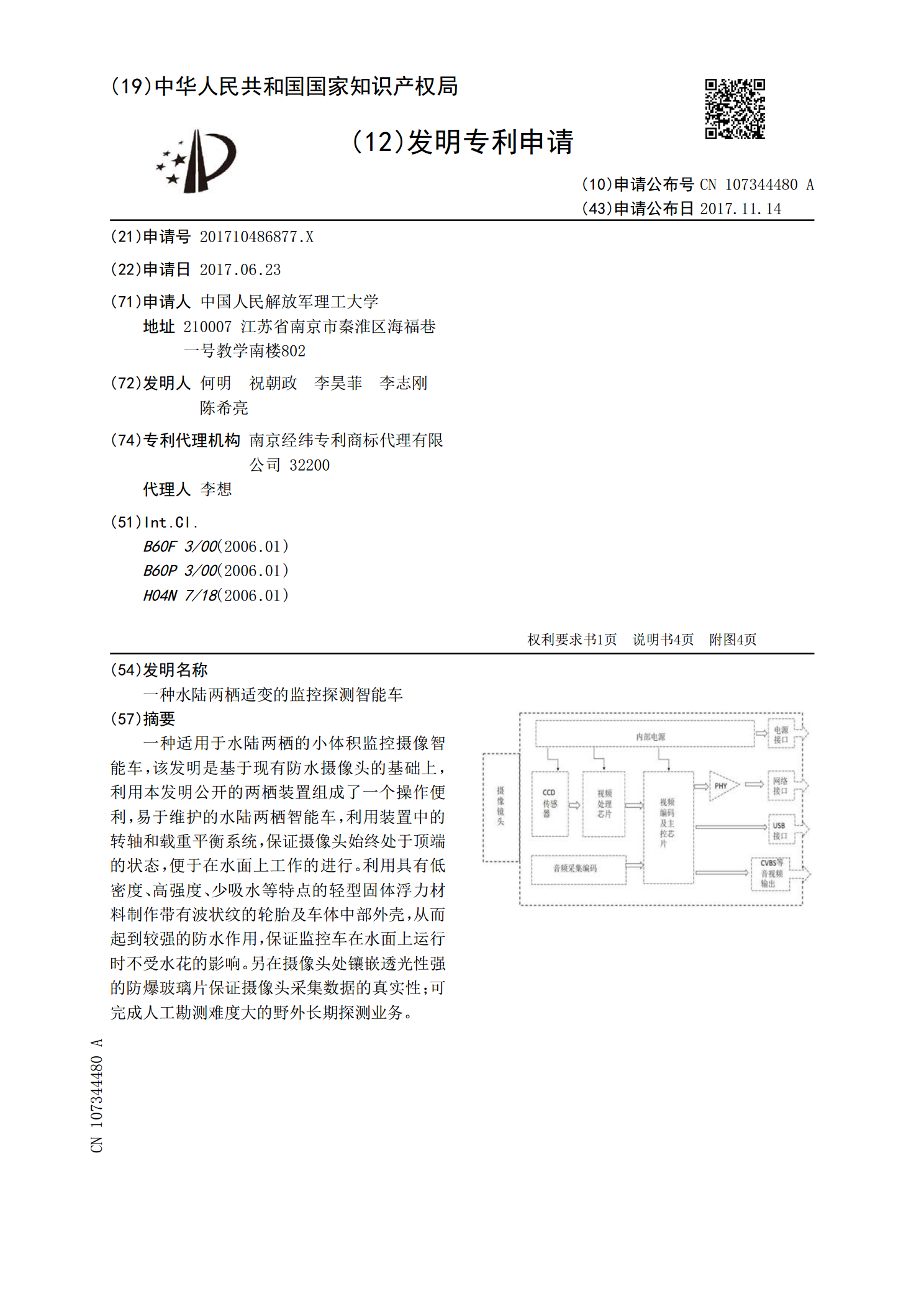
一种适用于水陆两栖的小体积监控摄像智能车,该发明是基于现有防水摄像头的基础上,利用本发明公开的两栖装置组成了一个操作便利,易于维护的水陆两栖智能车,利用装置中的转轴和载重平衡系统,保证摄像头始终处于顶端的状态,便于在水面上工作的进行。利用具有低密度、高强度、少吸水等特点的轻型固体浮力材料制作带有波状纹的轮胎及车体中部外壳,从而起到较强的防水作用,保证监控车在水面上运行时不受水花的影响。另在摄像头处镶嵌透光性强的防爆玻璃片保证摄像头采集数据的真实性;可完成人工勘测难度大的野外长期探测业务。
一种智能水陆两栖机器人.pdf
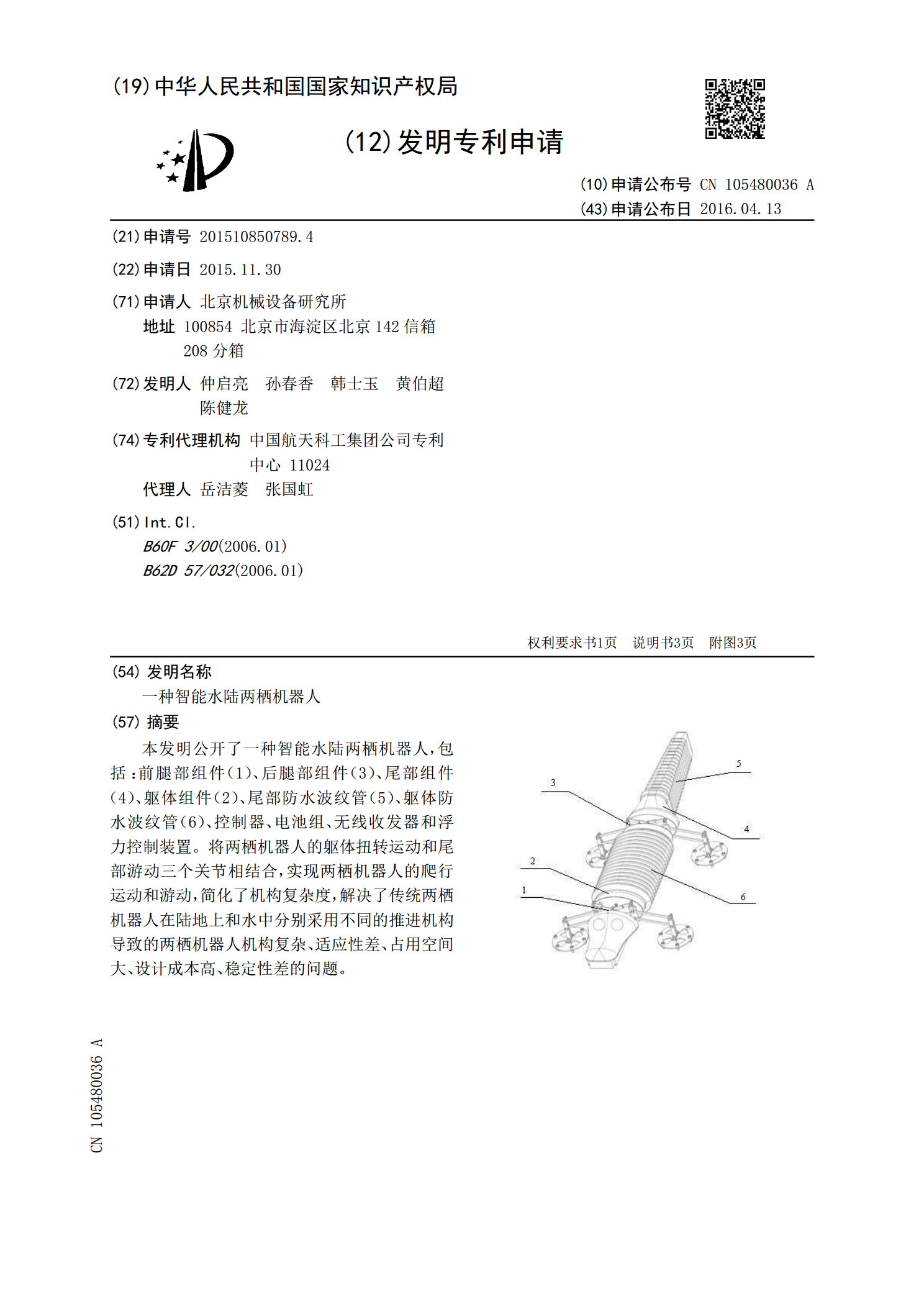
本发明公开了一种智能水陆两栖机器人,包括:前腿部组件(1)、后腿部组件(3)、尾部组件(4)、躯体组件(2)、尾部防水波纹管(5)、躯体防水波纹管(6)、控制器、电池组、无线收发器和浮力控制装置。将两栖机器人的躯体扭转运动和尾部游动三个关节相结合,实现两栖机器人的爬行运动和游动,简化了机构复杂度,解决了传统两栖机器人在陆地上和水中分别采用不同的推进机构导致的两栖机器人机构复杂、适应性差、占用空间大、设计成本高、稳定性差的问题。
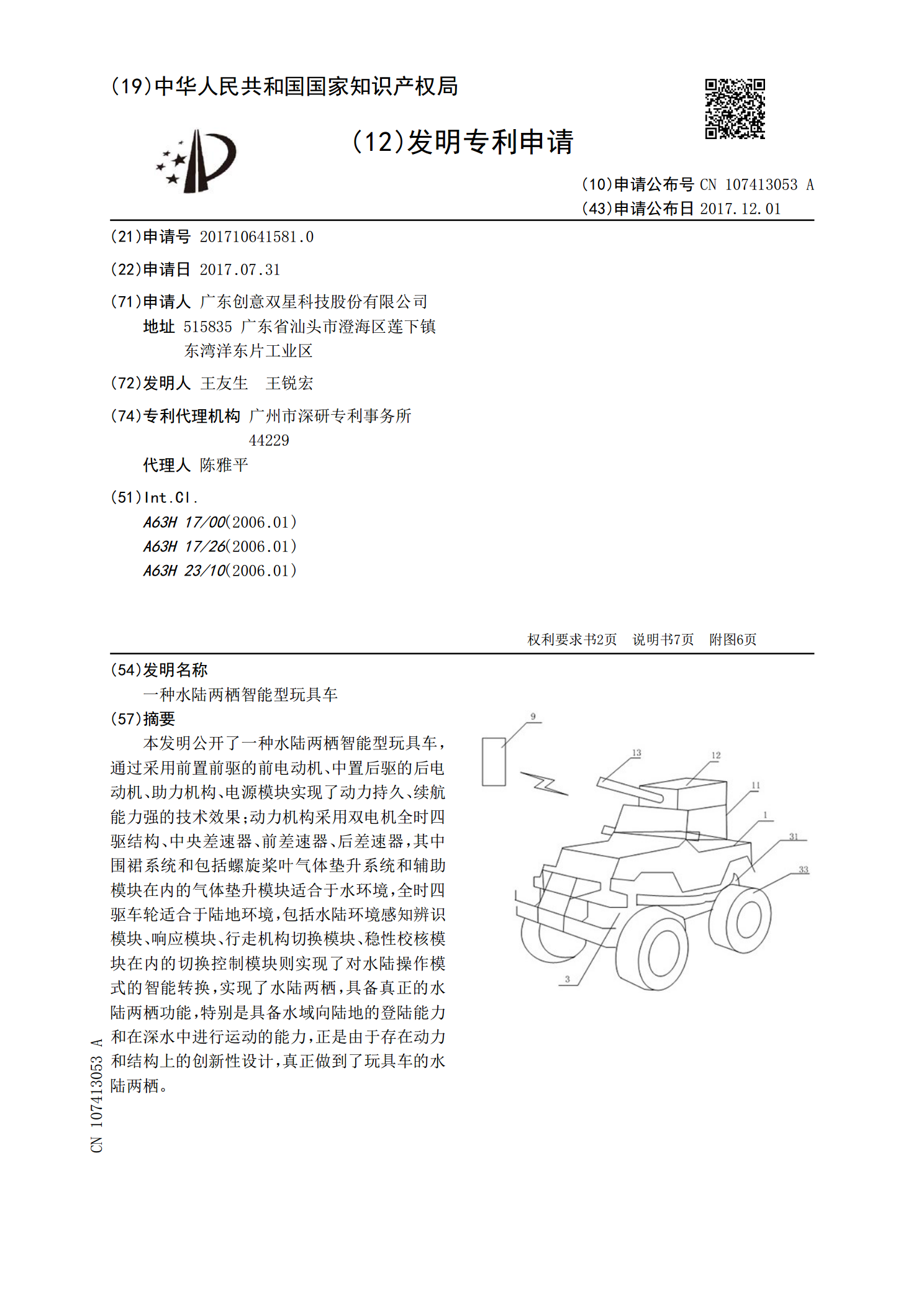
一种水陆两栖智能型玩具车.pdf
本发明公开了一种水陆两栖智能型玩具车,通过采用前置前驱的前电动机、中置后驱的后电动机、助力机构、电源模块实现了动力持久、续航能力强的技术效果;动力机构采用双电机全时四驱结构、中央差速器、前差速器、后差速器,其中围裙系统和包括螺旋桨叶气体垫升系统和辅助模块在内的气体垫升模块适合于水环境,全时四驱车轮适合于陆地环境,包括水陆环境感知辨识模块、响应模块、行走机构切换模块、稳性校核模块在内的切换控制模块则实现了对水陆操作模式的智能转换,实现了水陆两栖,具备真正的水陆两栖功能,特别是具备水域向陆地的登陆能力和在深水
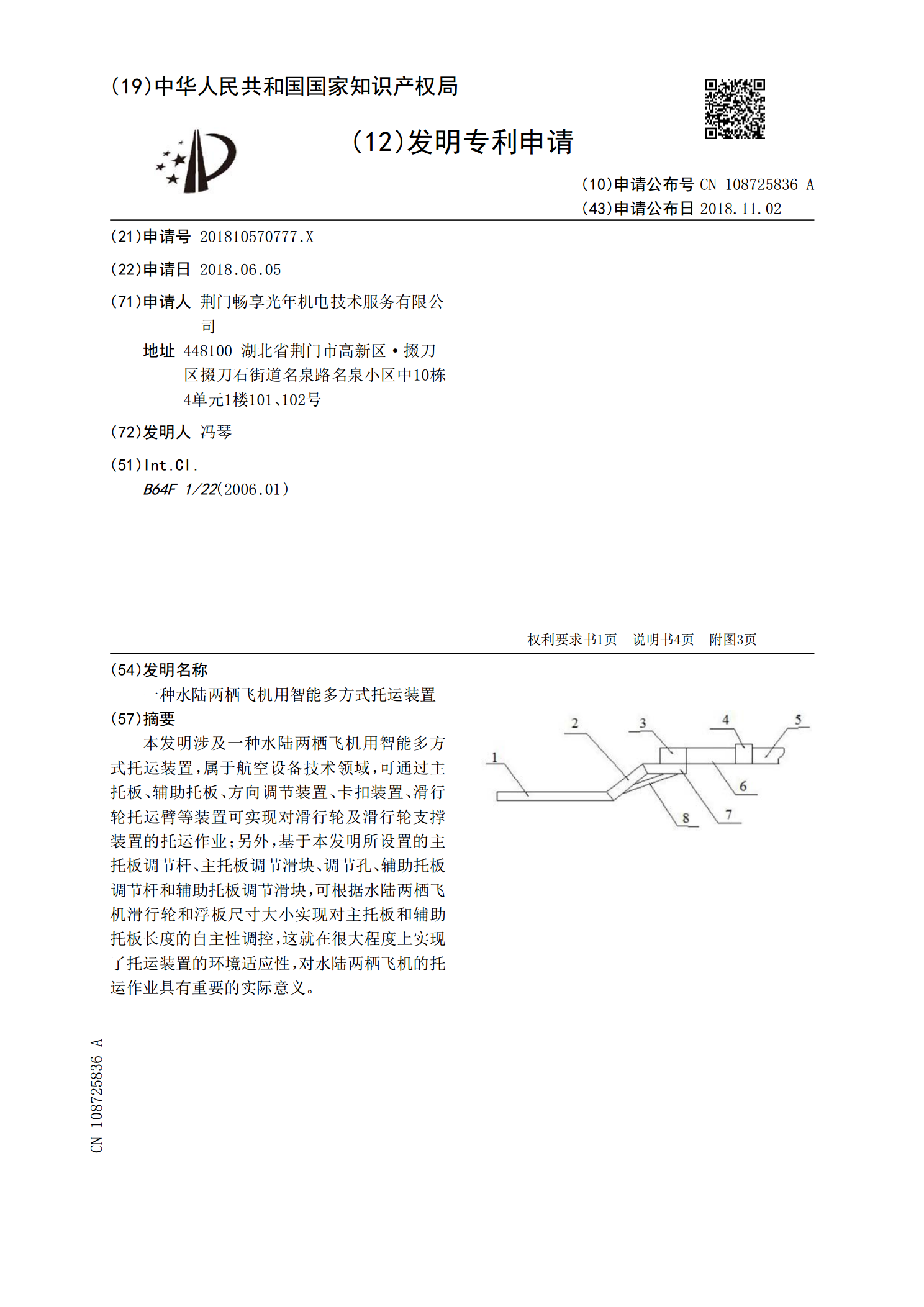
一种水陆两栖飞机用智能多方式托运装置.pdf
本发明涉及一种水陆两栖飞机用智能多方式托运装置,属于航空设备技术领域,可通过主托板、辅助托板、方向调节装置、卡扣装置、滑行轮托运臂等装置可实现对滑行轮及滑行轮支撑装置的托运作业;另外,基于本发明所设置的主托板调节杆、主托板调节滑块、调节孔、辅助托板调节杆和辅助托板调节滑块,可根据水陆两栖飞机滑行轮和浮板尺寸大小实现对主托板和辅助托板长度的自主性调控,这就在很大程度上实现了托运装置的环境适应性,对水陆两栖飞机的托运作业具有重要的实际意义。