
车道保持方法及雷达、车道保持系统.pdf

努力****元恺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车道保持方法及雷达、车道保持系统.pdf
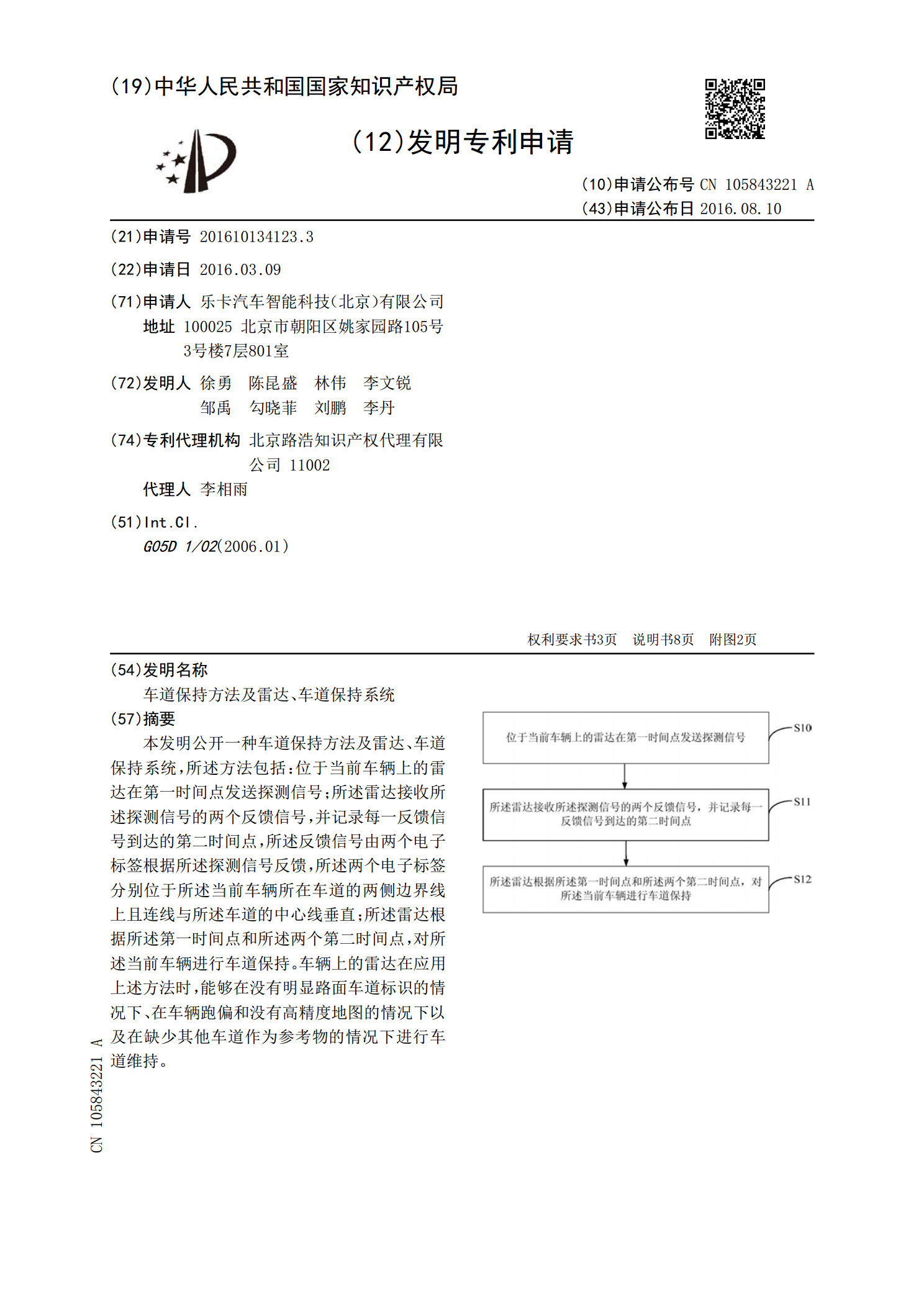
本发明公开一种车道保持方法及雷达、车道保持系统,所述方法包括:位于当前车辆上的雷达在第一时间点发送探测信号;所述雷达接收所述探测信号的两个反馈信号,并记录每一反馈信号到达的第二时间点,所述反馈信号由两个电子标签根据所述探测信号反馈,所述两个电子标签分别位于所述当前车辆所在车道的两侧边界线上且连线与所述车道的中心线垂直;所述雷达根据所述第一时间点和所述两个第二时间点,对所述当前车辆进行车道保持。车辆上的雷达在应用上述方法时,能够在没有明显路面车道标识的情况下、在车辆跑偏和没有高精度地图的情况下以及在缺少其他

车道保持辅助系统.ppt
驾驶辅助系统车道保持辅助系统(LaneAssisit)内容功能结构结构工作原理工作原理工作原理工作原理操作方法显示显示其他功能维修提示此课件下载可自行编辑修改,供参考!感谢您的支持,我们努力做得更好!

车道保持系统.doc
新型汽车电子维修技能培训1.汽车电脑板维修:A:很多都是维修电脑板通病,市场上电脑板内部资料只是很少的一部分,光靠内部资料维修电脑板已经不能够满足了,我们专业培训根据电脑板接脚定义绘制出内部的电路图,通过示波器和芯片接脚分析,熟练的掌握汽车电脑板内部原理和分析思路及检修方法!B:低压差线性,降压开关式,高压线性稳压器等电源芯片内部原理分析及改装方法。C:智能高端低端半桥全桥驱动芯片内部电路分析及改装方法,故障报告电路详细的分析D:英飞凌,飞思卡尔,瑞萨,德州仪器,意法微电子等公司的CPU内部工作原理,周围

车道保持方法、装置、设备、介质及系统.pdf
本发明实施例公开了一种车道保持方法、装置、设备、介质及系统。该方法包括:获取目标车辆的车辆行驶数据,将包括转向盘转角、车辆横向位置以及车辆横向加速度的车辆行驶数据输入至预先训练的驾驶风格辨识模型中,得到驾驶风格辨识模型输出的目标车辆对应的驾驶风格类别,确定出用户的驾驶风格,进而根据驾驶风格类别和目标车辆的车辆状态数据,确定目标车辆的目标转向盘转角,基于该目标转向盘转角调整目标车辆的转向盘转角,以控制车辆回归至车道中心线位置,实现了基于用户驾驶风格的车道保持控制,满足了不同驾驶习惯的驾驶人的差异化需求,极大

车道宽度与车道保持辅助系统之关系浅论.docx
车道宽度与车道保持辅助系统之关系浅论车道宽度与车道保持辅助系统之关系浅论摘要:车道宽度对于车辆行驶的安全和稳定性有重要影响,而车道保持辅助系统则是当代车辆智能化的代表之一,具有提高驾驶舒适性和安全性的功能。本文旨在探讨车道宽度与车道保持辅助系统之间的关系,并分析其对驾驶行为和道路交通安全的影响。1.引言车道宽度是指两条相邻车道之间的水平距离,不同地区和不同道路类型的车道宽度都有一定的规范要求。车道宽度的合理设置能够提高车辆行驶的安全性和流畅性,减少交通事故的发生率。而车道保持辅助系统是一种基于传感器、摄像