
唤醒智能交互机器人的方法及智能交互机器人.pdf

邻家****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

唤醒智能交互机器人的方法及智能交互机器人.pdf
发明实施例提供一种唤醒智能交互机器人的方法及智能交互机器人,所述智能交互机器人包括至少一个组件,所述方法包括:在休眠状态下,获取交互操作,并确定与所述交互操作的类型对应的交互参数;判断所述交互参数是否符合唤醒操作要求;当所述交互参数符合所述唤醒操作要求时,开启相应的处于关闭状态的组件。
调整智能交互机器人姿态的方法及智能交互机器人.pdf
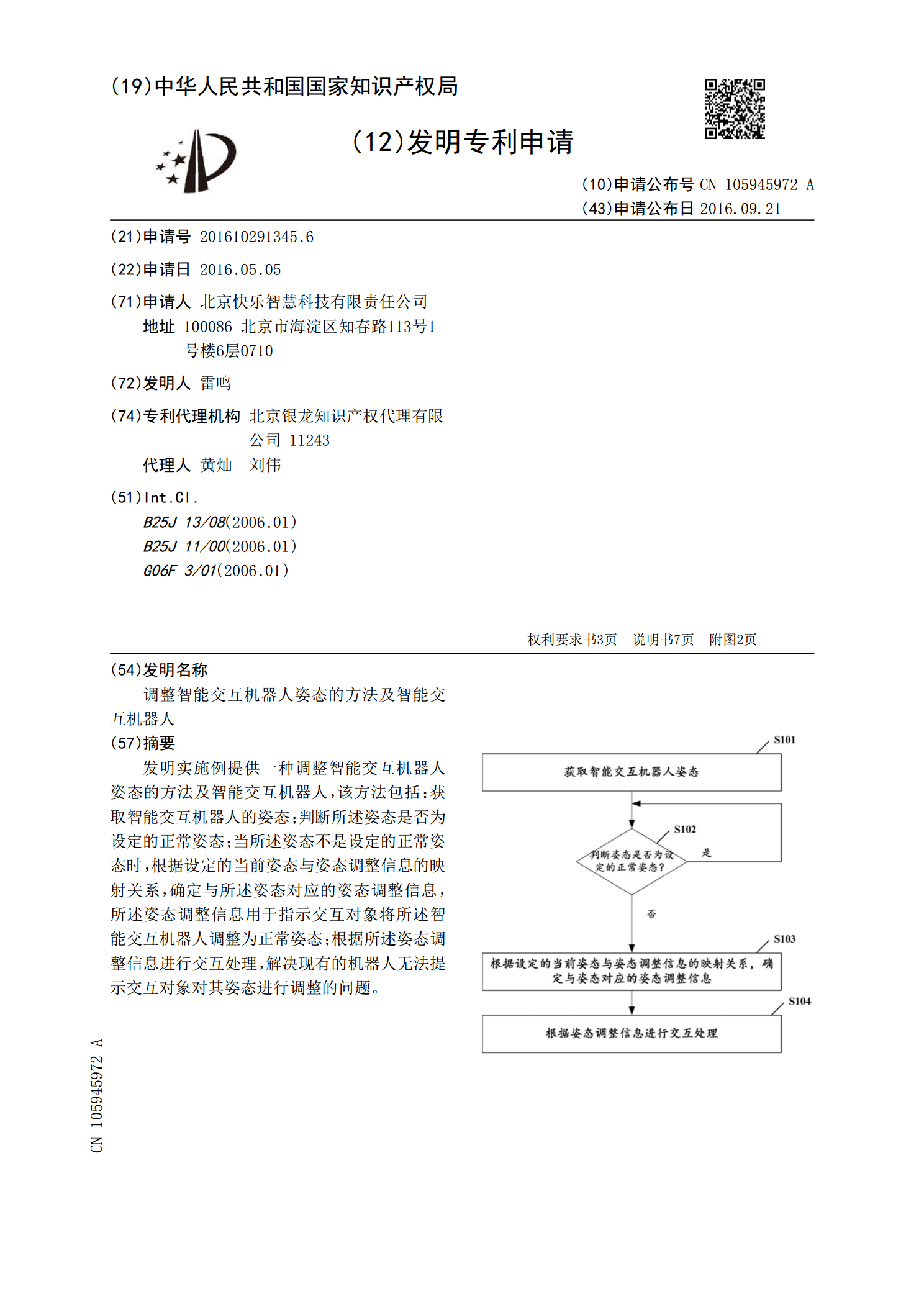
发明实施例提供一种调整智能交互机器人姿态的方法及智能交互机器人,该方法包括:获取智能交互机器人的姿态;判断所述姿态是否为设定的正常姿态;当所述姿态不是设定的正常姿态时,根据设定的当前姿态与姿态调整信息的映射关系,确定与所述姿态对应的姿态调整信息,所述姿态调整信息用于指示交互对象将所述智能交互机器人调整为正常姿态;根据所述姿态调整信息进行交互处理,解决现有的机器人无法提示交互对象对其姿态进行调整的问题。

智能交互机器人提醒显示屏距离的方法及智能交互机器人.pdf
发明实施例提供一种智能交互机器人提醒显示屏距离的方法及智能交互机器人,该方法包括:获取交互对象的对象信息;检测所述交互对象和智能交互机器人的显示屏之间的距离;将检测到的所述交互对象到所述智能交互机器人的显示屏的距离和预设的距离进行对比;当所述交互对象到所述智能交互机器人的显示屏的距离小于或等于所述预设的距离时,确定与所述对象信息对应的提醒信息;根据所述提醒信息提醒所述交互对象,解决现有的机器人无法提示提示显示屏距离的问题。

一种智能交互机器人提醒休息的方法及智能交互机器人.pdf
发明实施例提供一种智能交互机器人提醒休息的方法及智能交互机器人,该方法包括:针对智能交互机器人的每个应用预先设定对应的休息条件和休息模式;存储每个应用及其对应的休息条件和休息模式;交互对象使用智能交互机器人的应用;当应用对应的休息条件满足时,智能交互机器人启动对应的休息模式,采用了该实施例,解决现有的智能交互机器人无法提醒交互对象休息的问题。
一种智能机器人及智能交互方法.pdf
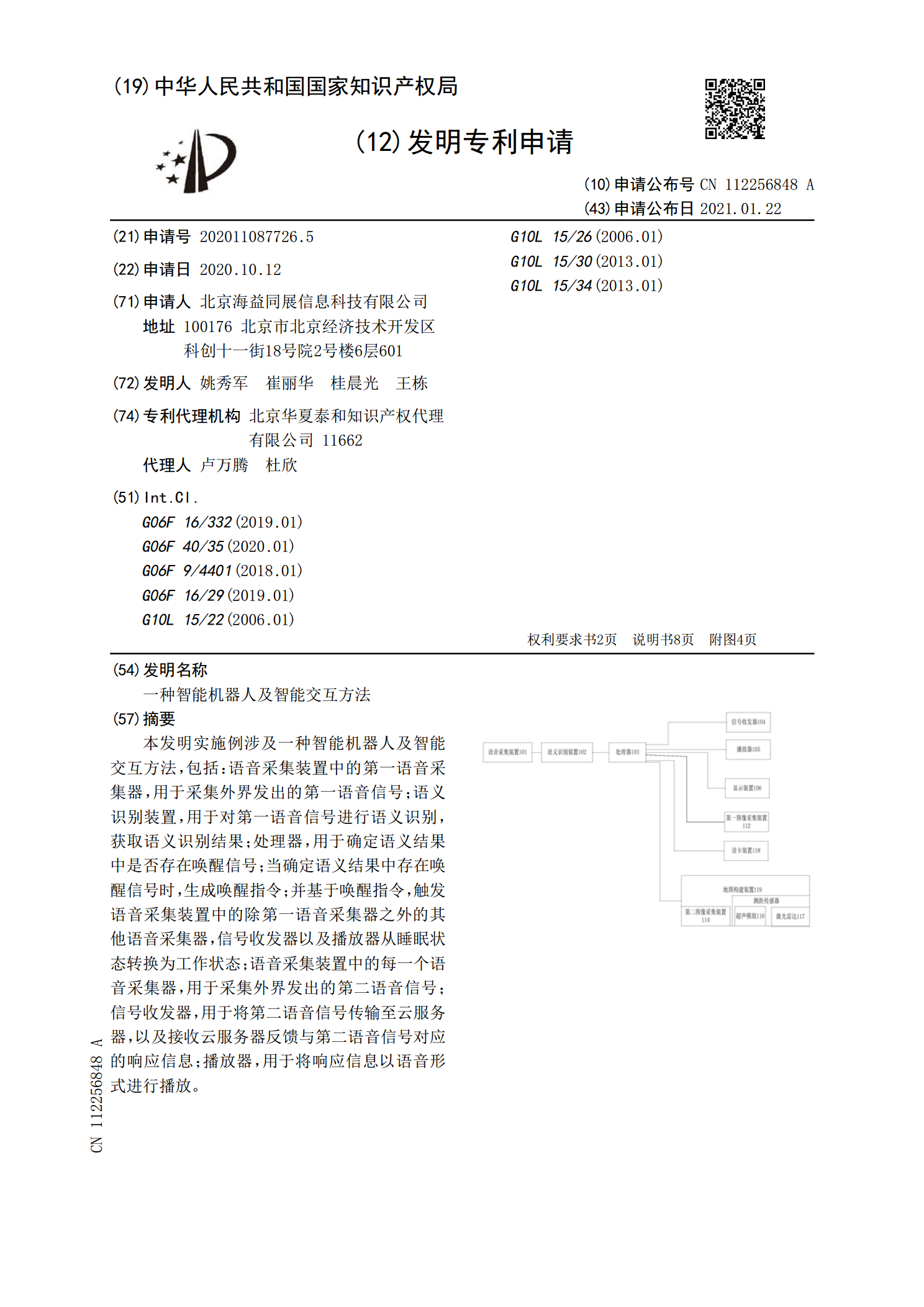
本发明实施例涉及一种智能机器人及智能交互方法,包括:语音采集装置中的第一语音采集器,用于采集外界发出的第一语音信号;语义识别装置,用于对第一语音信号进行语义识别,获取语义识别结果;处理器,用于确定语义结果中是否存在唤醒信号;当确定语义结果中存在唤醒信号时,生成唤醒指令;并基于唤醒指令,触发语音采集装置中的除第一语音采集器之外的其他语音采集器,信号收发器以及播放器从睡眠状态转换为工作状态;语音采集装置中的每一个语音采集器,用于采集外界发出的第二语音信号;信号收发器,用于将第二语音信号传输至云服务器,以及接收