
基于PLC的自动对靶变量喷雾系统及其控制方法.pdf

玄静****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于PLC的自动对靶变量喷雾系统及其控制方法.pdf
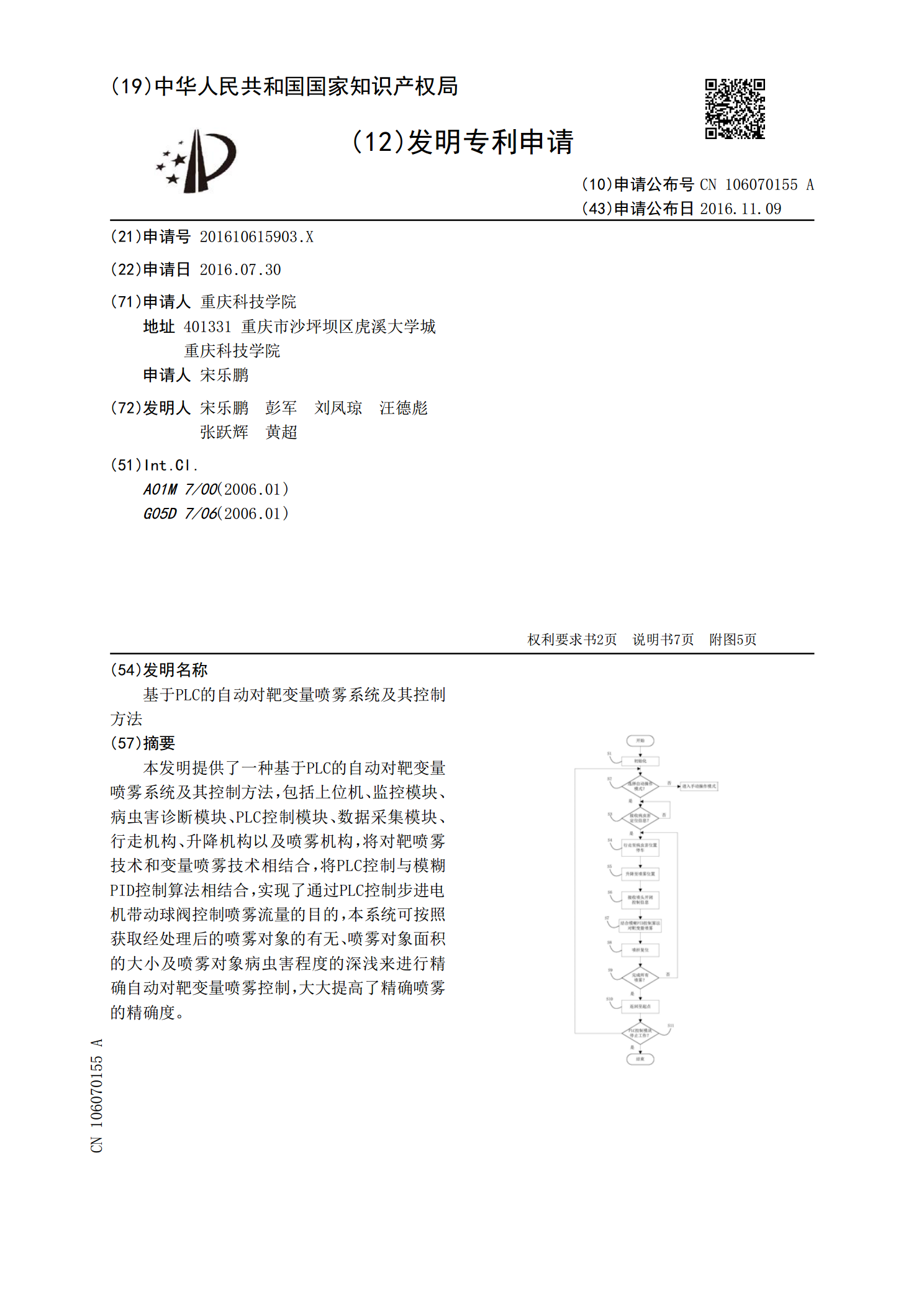
本发明提供了一种基于PLC的自动对靶变量喷雾系统及其控制方法,包括上位机、监控模块、病虫害诊断模块、PLC控制模块、数据采集模块、行走机构、升降机构以及喷雾机构,将对靶喷雾技术和变量喷雾技术相结合,将PLC控制与模糊PID控制算法相结合,实现了通过PLC控制步进电机带动球阀控制喷雾流量的目的,本系统可按照获取经处理后的喷雾对象的有无、喷雾对象面积的大小及喷雾对象病虫害程度的深浅来进行精确自动对靶变量喷雾控制,大大提高了精确喷雾的精确度。
基于PLC的变量喷雾系统及其控制方法.pdf
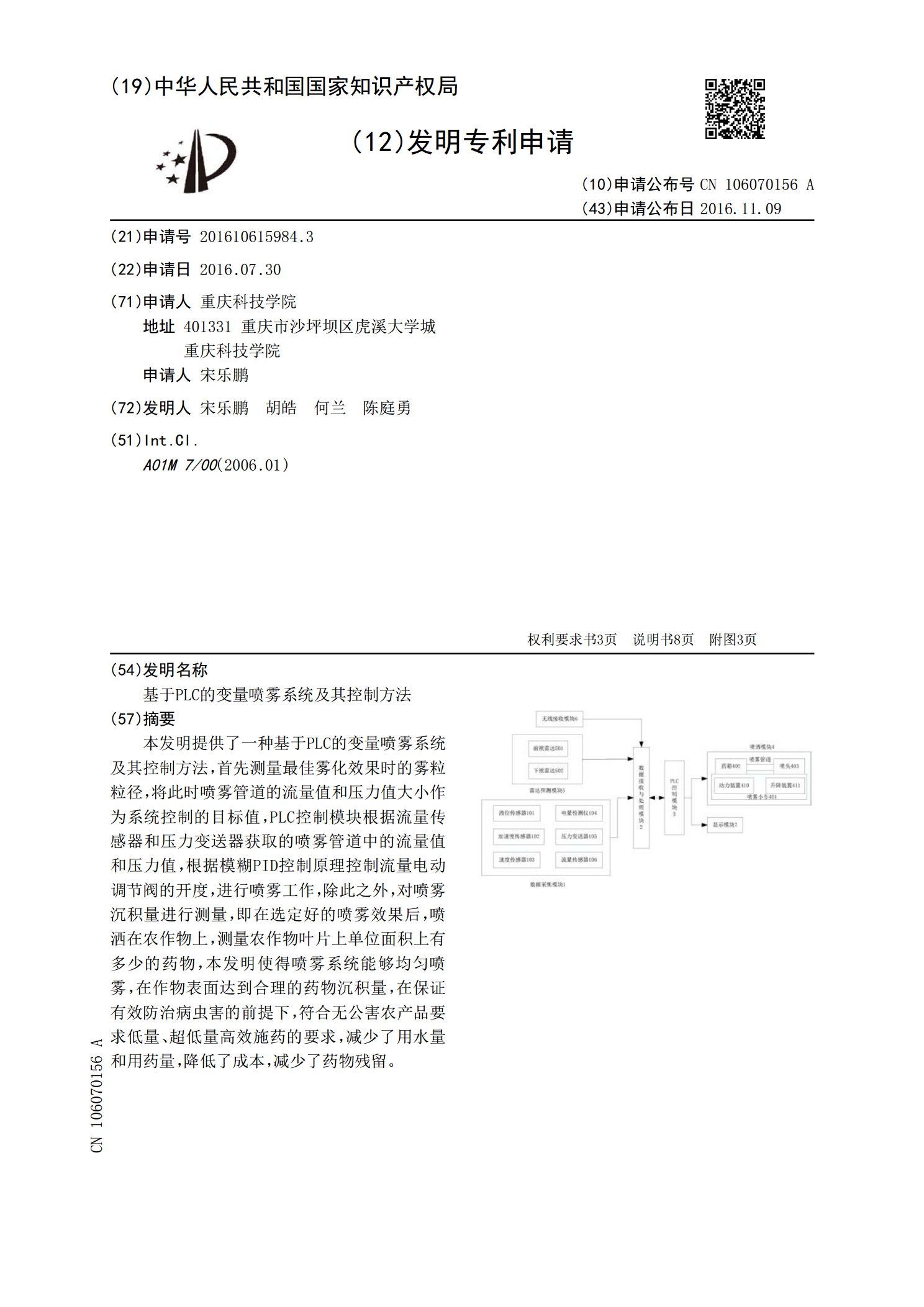
本发明提供了一种基于PLC的变量喷雾系统及其控制方法,首先测量最佳雾化效果时的雾粒粒径,将此时喷雾管道的流量值和压力值大小作为系统控制的目标值,PLC控制模块根据流量传感器和压力变送器获取的喷雾管道中的流量值和压力值,根据模糊PID控制原理控制流量电动调节阀的开度,进行喷雾工作,除此之外,对喷雾沉积量进行测量,即在选定好的喷雾效果后,喷洒在农作物上,测量农作物叶片上单位面积上有多少的药物,本发明使得喷雾系统能够均匀喷雾,在作物表面达到合理的药物沉积量,在保证有效防治病虫害的前提下,符合无公害农产品要求低量
基于PLC控制的自动物料搬送系统及其控制方法.pdf
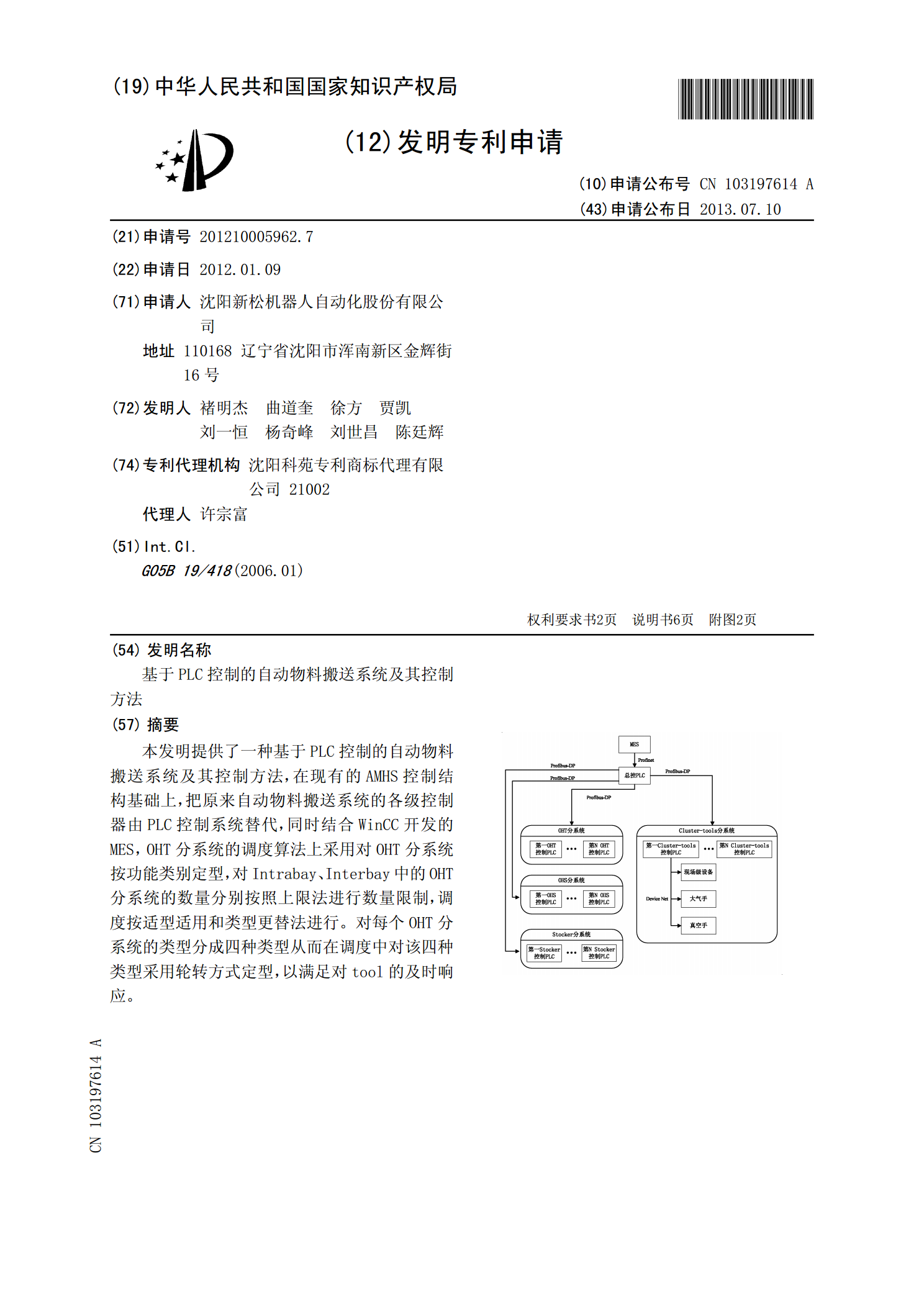
本发明提供了一种基于PLC控制的自动物料搬送系统及其控制方法,在现有的AMHS控制结构基础上,把原来自动物料搬送系统的各级控制器由PLC控制系统替代,同时结合WinCC开发的MES,OHT分系统的调度算法上采用对OHT分系统按功能类别定型,对Intrabay、Interbay中的OHT分系统的数量分别按照上限法进行数量限制,调度按适型适用和类型更替法进行。对每个OHT分系统的类型分成四种类型从而在调度中对该四种类型采用轮转方式定型,以满足对tool的及时响应。

基于PLC的自动计时系统及其计时方法.pdf
本发明涉及一种基于PLC的自动计时系统及其计时方法,用于金属制品厂工人每班工作量的自动计算。系统包括成品线一端的电机和交流接触器、PLC控制器和上位机,通过PLC控制器采集交流接触器的开关信号,计算电机运行时间,并通过工业以太网络将数据传送给上位机,上位机根据电机运行时间计算出每台拉丝机和制钉机的产量,并直接生成报表,用于工人的工作量结算,同时上位机向PLC主站发送清零命令,PLC主站清除当班所有数据后,系统开始新一轮的计时。本自动计时系统避免了工人每天下班前称重成品计算工作量所带来的工时浪费,不仅节省了
一种基于垂直施药结构的变量喷雾控制系统及其喷头流量独立控制方法.pdf
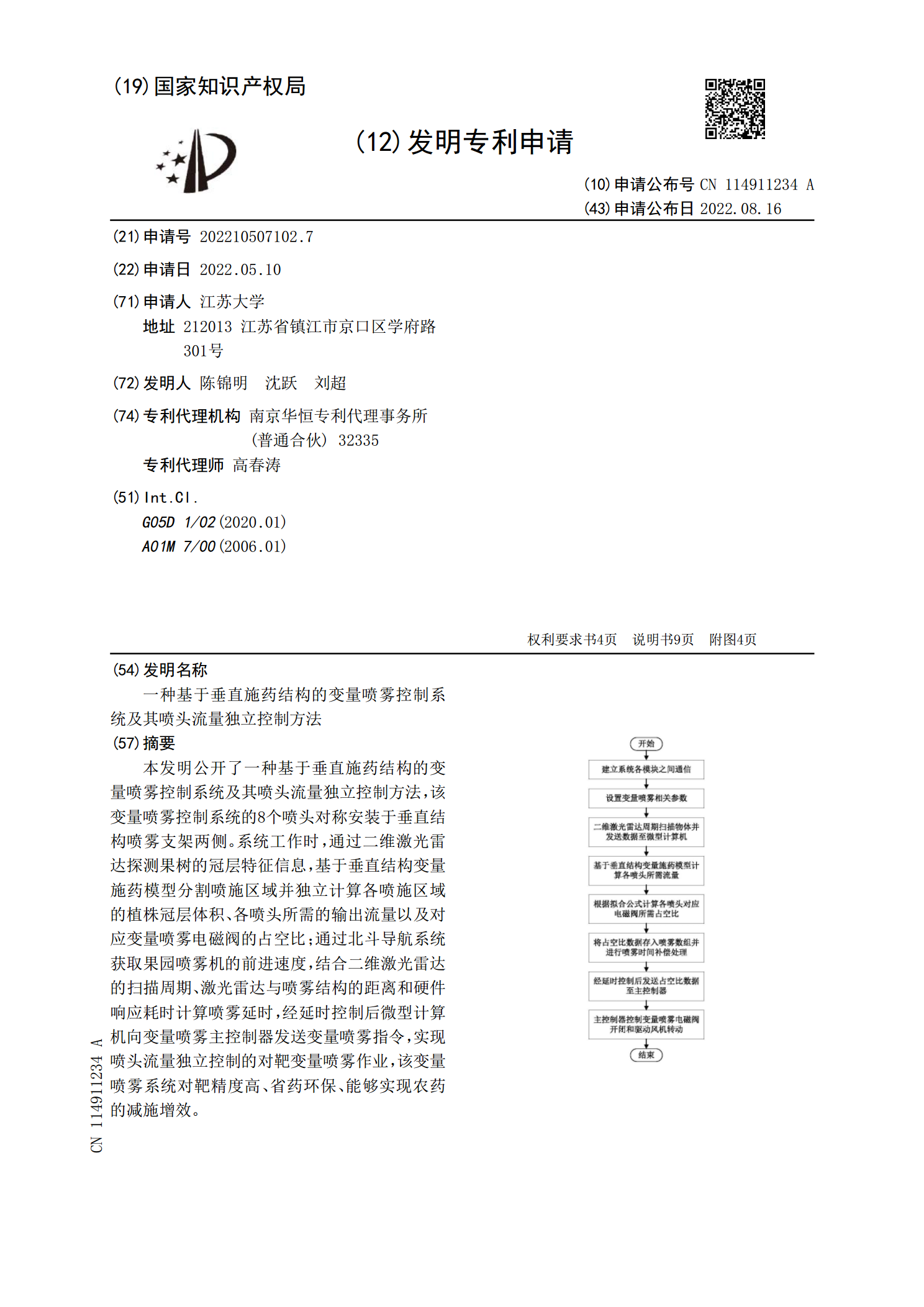
本发明公开了一种基于垂直施药结构的变量喷雾控制系统及其喷头流量独立控制方法,该变量喷雾控制系统的8个喷头对称安装于垂直结构喷雾支架两侧。系统工作时,通过二维激光雷达探测果树的冠层特征信息,基于垂直结构变量施药模型分割喷施区域并独立计算各喷施区域的植株冠层体积、各喷头所需的输出流量以及对应变量喷雾电磁阀的占空比;通过北斗导航系统获取果园喷雾机的前进速度,结合二维激光雷达的扫描周期、激光雷达与喷雾结构的距离和硬件响应耗时计算喷雾延时,经延时控制后微型计算机向变量喷雾主控制器发送变量喷雾指令,实现喷头流量独立控