
一种基于多智能体的智能控制系统及方法.pdf

是你****松呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多智能体的智能控制系统及方法.pdf
本发明公开了一种基于多智能体的智能控制系统及方法,该系统协调游乐场内碰碰车完成沿指定路线自动驾驶,包括定位系统、通讯系统、识别系统和服务端;通讯系统由配置在每辆车上的无线收发模块组成,无线收发模块包括置于车头的发送模块和置于车尾的接收模块;定位系统包括置于运动场地上方的摄像头。识别系统包括置于每辆车车头的双目摄像头服务端接收定位系统和无线收发模块发送的实时信号,接收车辆发出的自动驾驶请求或求救信号时做不同处理。本发明系统及方法让碰碰车加入了自动驾驶的新鲜体验以及碰撞之后自转所带来的刺激感,并且通过逃逸算法
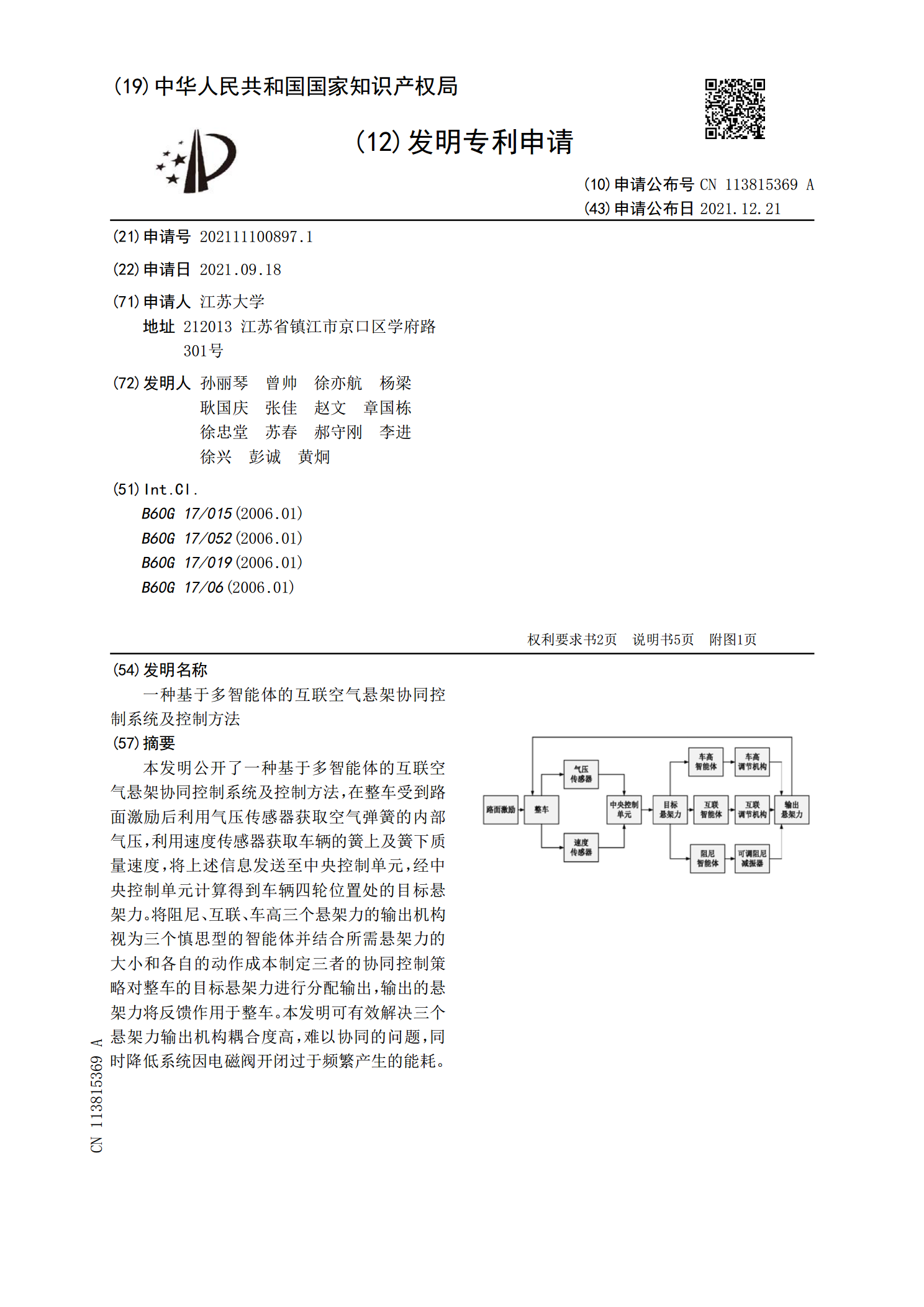
一种基于多智能体的互联空气悬架协同控制系统及控制方法.pdf
本发明公开了一种基于多智能体的互联空气悬架协同控制系统及控制方法,在整车受到路面激励后利用气压传感器获取空气弹簧的内部气压,利用速度传感器获取车辆的簧上及簧下质量速度,将上述信息发送至中央控制单元,经中央控制单元计算得到车辆四轮位置处的目标悬架力。将阻尼、互联、车高三个悬架力的输出机构视为三个慎思型的智能体并结合所需悬架力的大小和各自的动作成本制定三者的协同控制策略对整车的目标悬架力进行分配输出,输出的悬架力将反馈作用于整车。本发明可有效解决三个悬架力输出机构耦合度高,难以协同的问题,同时降低系统因电磁阀
基于多智能体的生产调度方法与应用.pdf
武汉理工大学硕士学位论文基于多智能体的生产调度方法与应用姓名:戴涛申请学位级别:硕士专业:系统工程指导教师:罗荣桂20061101摘要建立了一套基于多个智能体系统的车间调度系统模型系统的智能化通过招标一多智能体技术是目前人工智能领域的研究热点它对解决具有空间分布特点的复杂问题有着独特的优势是一种具有重要研究意义和应用价值的方法。生产调度是控制与管理一体化的接合部向上要给企业经营战略决策层

一种基于多智能体的微电网运行控制方法.pdf
本发明公开了一种基于多智能体的微电网运行控制方法,以电价作为微电网运行的主要参考指标,将微电网中的可再生能源发电装置、负载、汽轮机、电池、控制器等分别抽象成一个个智能体,从而构成一个分散的多智能体系统。在这个系统中,负载智能体扮演消费者(或买家)角色,可再生能源发电装置智能体和汽轮机智能体扮演生产者(或卖家)角色,电池智能体扮演产销者(或买卖者)角色,控制器多智能体扮演定价者角色,即由控制器决定峰谷电价以及是否向主干网购电或售电。基于电价、运行成本和负载需求,各个智能体之间通过协商进行调整,从而实现微电网
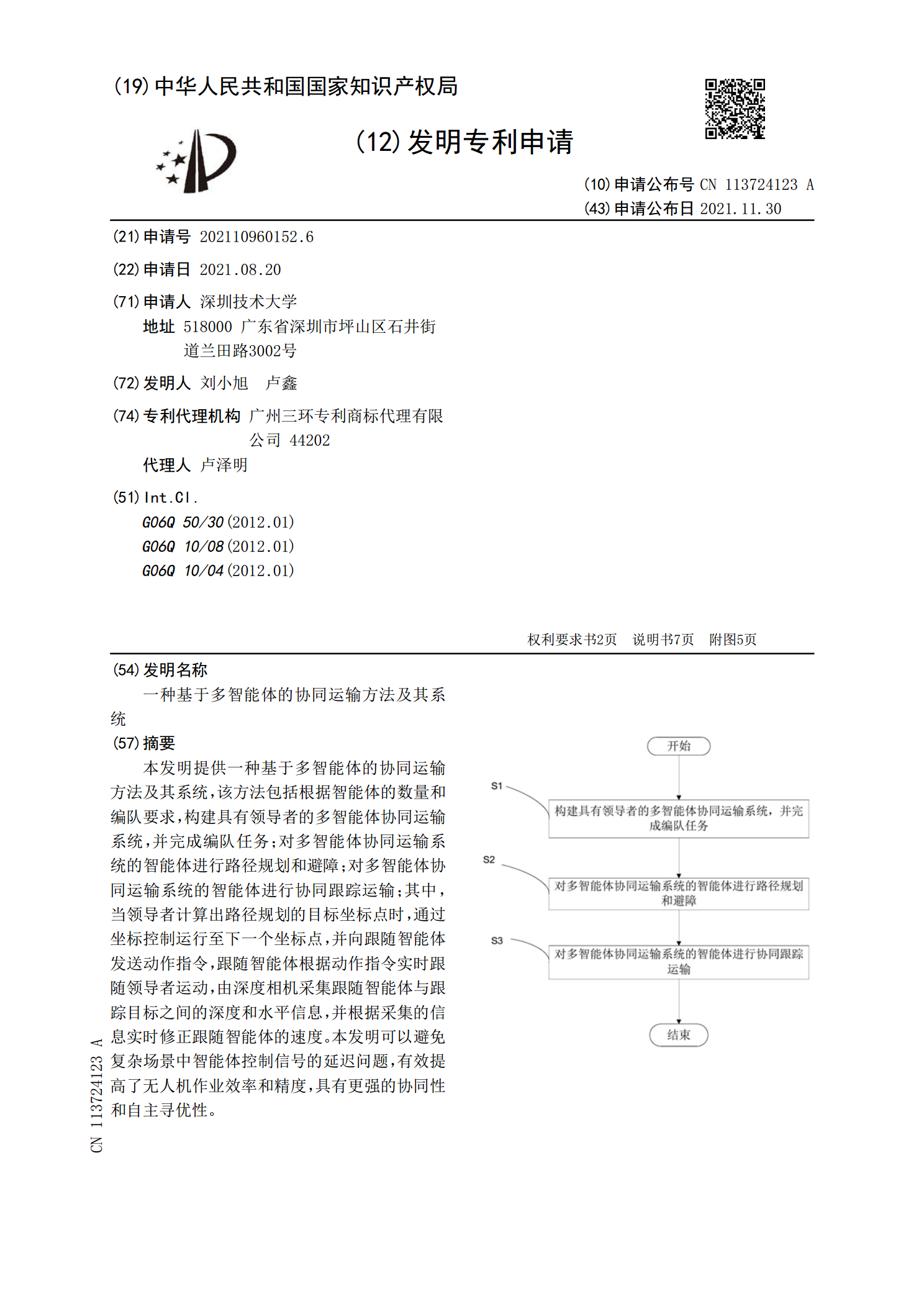
一种基于多智能体的协同运输方法及其系统.pdf
本发明提供一种基于多智能体的协同运输方法及其系统,该方法包括根据智能体的数量和编队要求,构建具有领导者的多智能体协同运输系统,并完成编队任务;对多智能体协同运输系统的智能体进行路径规划和避障;对多智能体协同运输系统的智能体进行协同跟踪运输;其中,当领导者计算出路径规划的目标坐标点时,通过坐标控制运行至下一个坐标点,并向跟随智能体发送动作指令,跟随智能体根据动作指令实时跟随领导者运动,由深度相机采集跟随智能体与跟踪目标之间的深度和水平信息,并根据采集的信息实时修正跟随智能体的速度。本发明可以避免复杂场景中智