
一种基于多智能体的互联空气悬架协同控制系统及控制方法.pdf

元枫****文章


1/9

2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于多智能体的互联空气悬架协同控制系统及控制方法.pdf
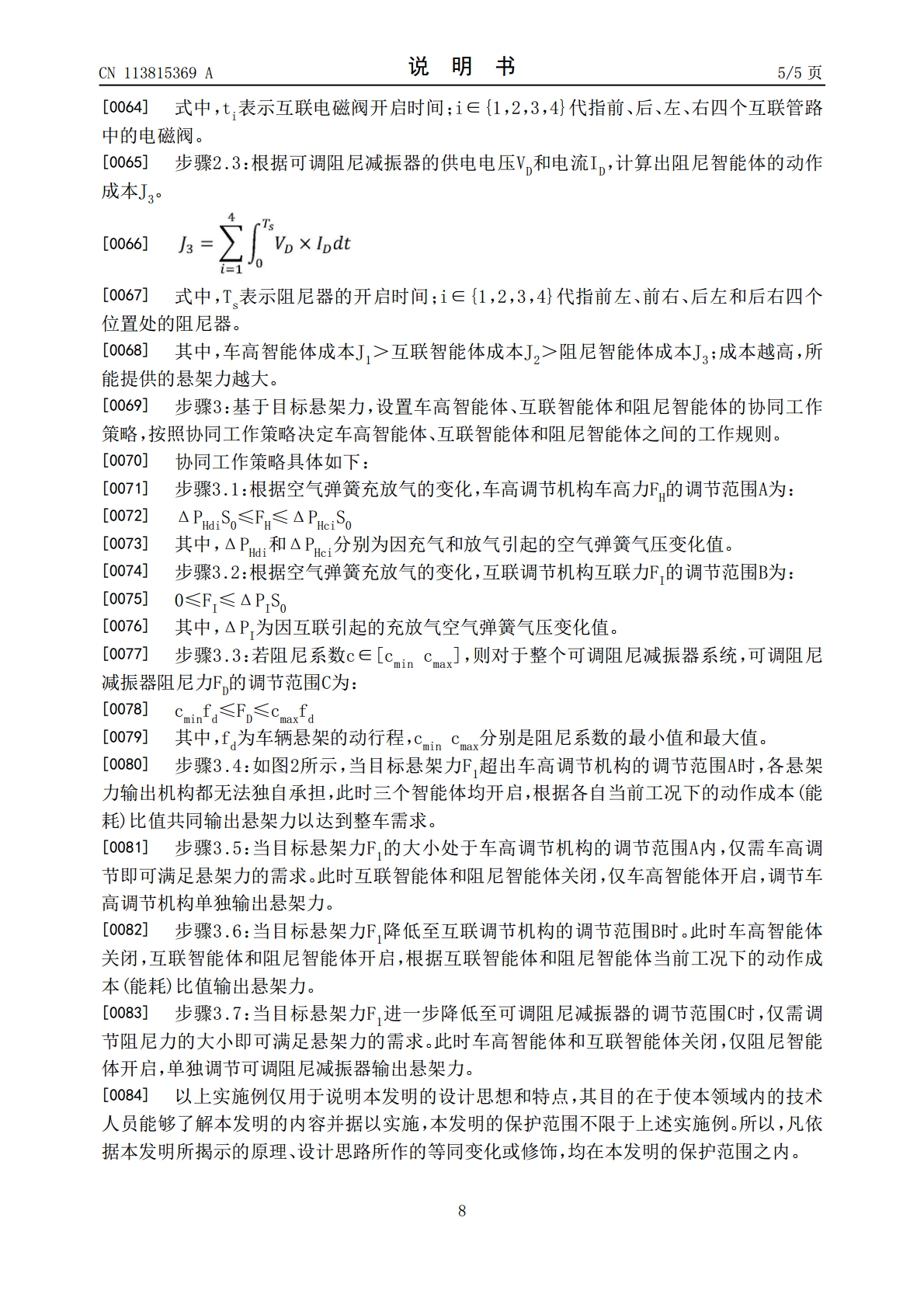
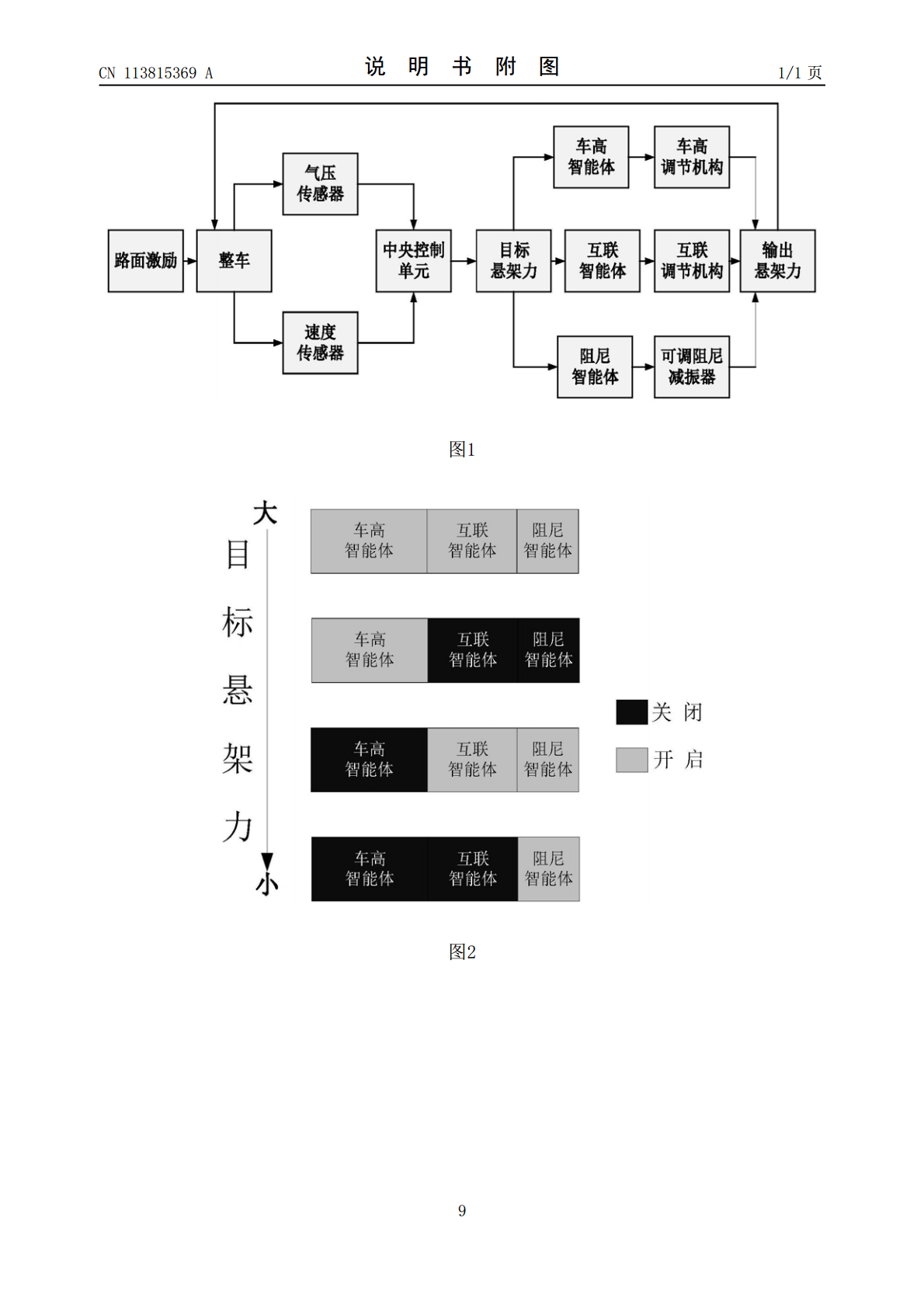
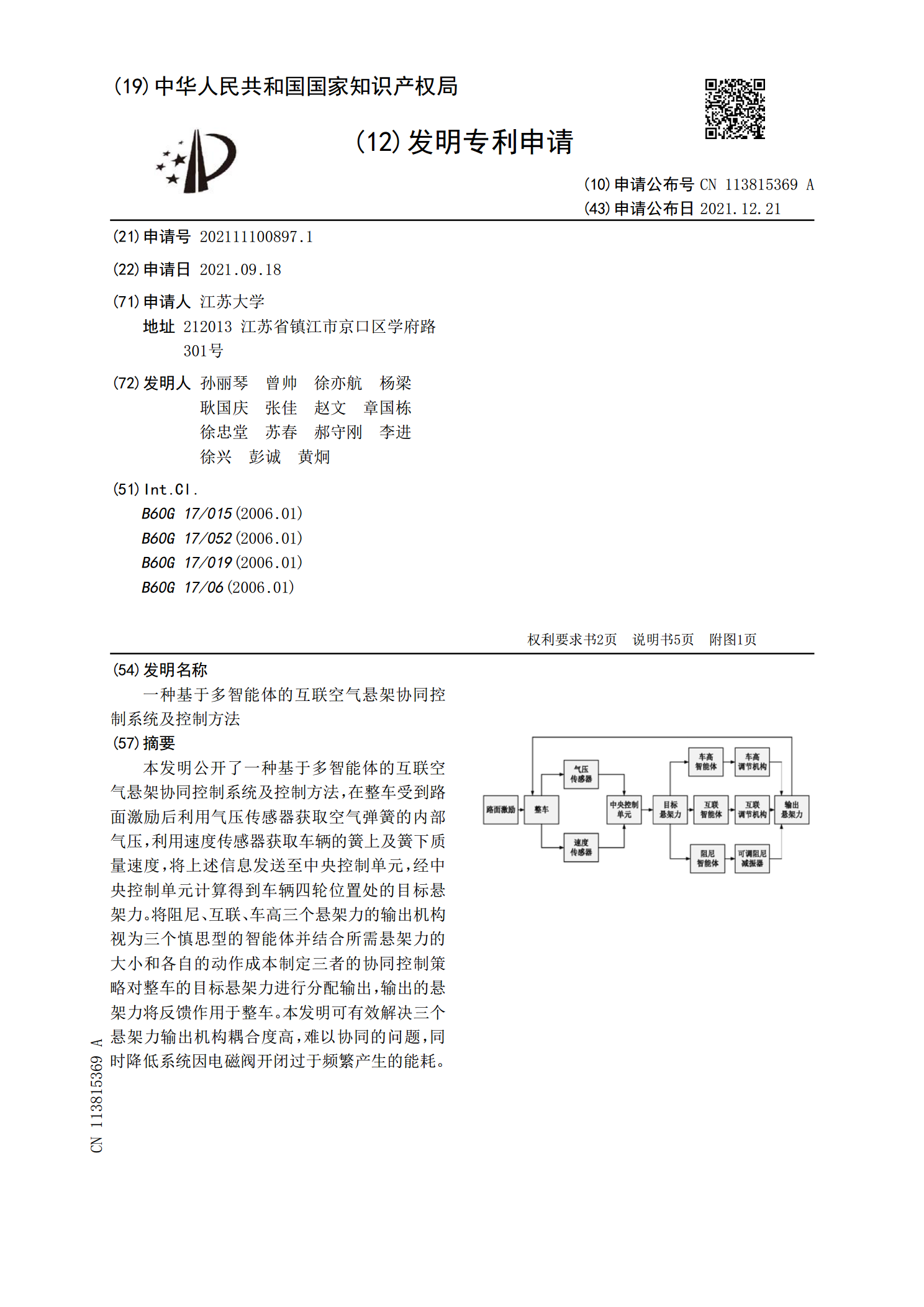
本发明公开了一种基于多智能体的互联空气悬架协同控制系统及控制方法,在整车受到路面激励后利用气压传感器获取空气弹簧的内部气压,利用速度传感器获取车辆的簧上及簧下质量速度,将上述信息发送至中央控制单元,经中央控制单元计算得到车辆四轮位置处的目标悬架力。将阻尼、互联、车高三个悬架力的输出机构视为三个慎思型的智能体并结合所需悬架力的大小和各自的动作成本制定三者的协同控制策略对整车的目标悬架力进行分配输出,输出的悬架力将反馈作用于整车。本发明可有效解决三个悬架力输出机构耦合度高,难以协同的问题,同时降低系统因电磁阀

一种基于多智能体的智能控制系统及方法.pdf
本发明公开了一种基于多智能体的智能控制系统及方法,该系统协调游乐场内碰碰车完成沿指定路线自动驾驶,包括定位系统、通讯系统、识别系统和服务端;通讯系统由配置在每辆车上的无线收发模块组成,无线收发模块包括置于车头的发送模块和置于车尾的接收模块;定位系统包括置于运动场地上方的摄像头。识别系统包括置于每辆车车头的双目摄像头服务端接收定位系统和无线收发模块发送的实时信号,接收车辆发出的自动驾驶请求或求救信号时做不同处理。本发明系统及方法让碰碰车加入了自动驾驶的新鲜体验以及碰撞之后自转所带来的刺激感,并且通过逃逸算法

基于多智能体的煤矿区域协同控制系统设计.docx
基于多智能体的煤矿区域协同控制系统设计Title:DesignofaMulti-Agent-basedCoalMineAreaCollaborativeControlSystemAbstract:Inrecentyears,theminingindustryhaswitnessedsignificantadvancementsintechnologytoimprovesafetyandefficiency.Onepromisingareaisthedevelopmentofcollaborativecon
一种基于多智能体的协同运输方法及其系统.pdf
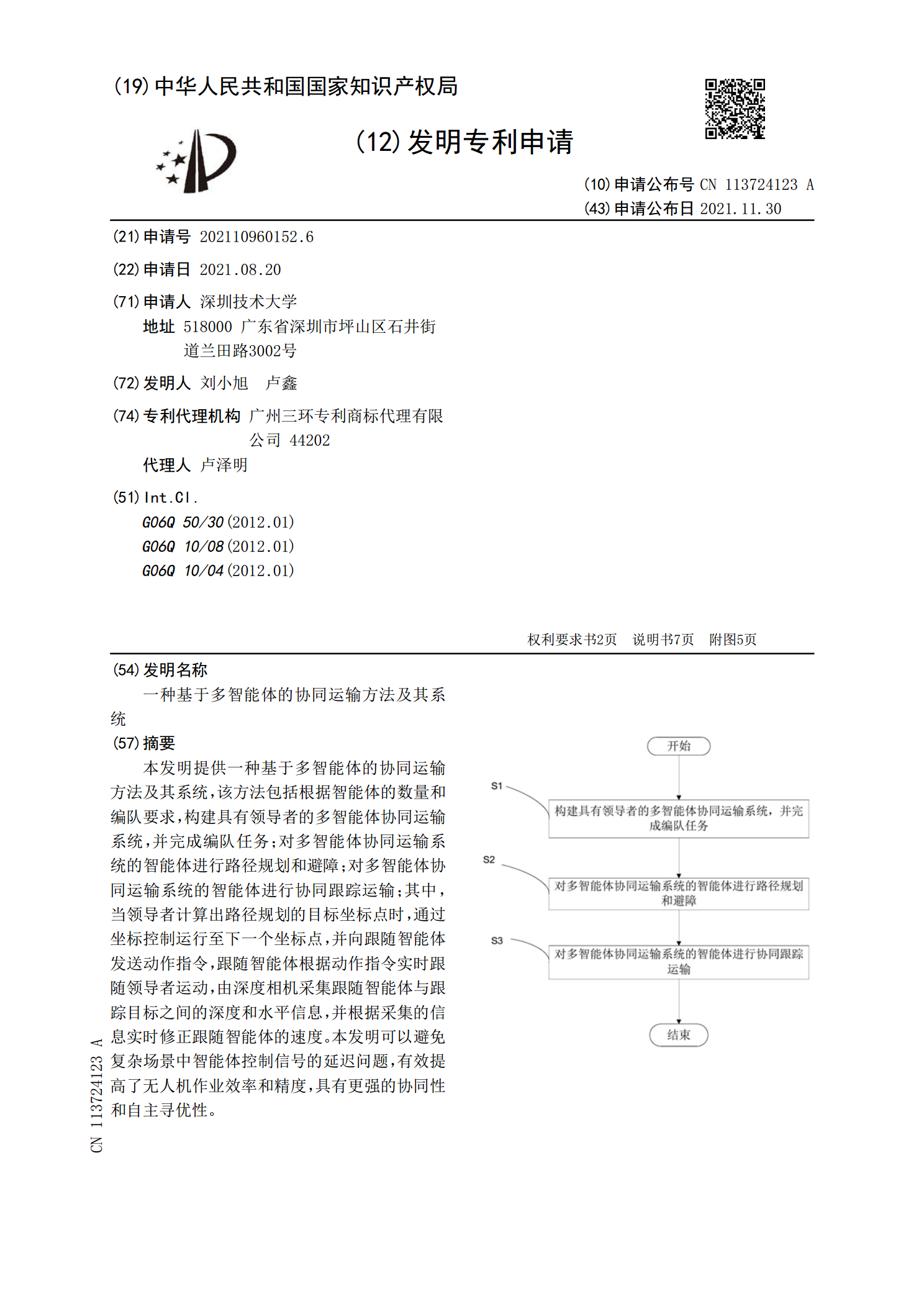
本发明提供一种基于多智能体的协同运输方法及其系统,该方法包括根据智能体的数量和编队要求,构建具有领导者的多智能体协同运输系统,并完成编队任务;对多智能体协同运输系统的智能体进行路径规划和避障;对多智能体协同运输系统的智能体进行协同跟踪运输;其中,当领导者计算出路径规划的目标坐标点时,通过坐标控制运行至下一个坐标点,并向跟随智能体发送动作指令,跟随智能体根据动作指令实时跟随领导者运动,由深度相机采集跟随智能体与跟踪目标之间的深度和水平信息,并根据采集的信息实时修正跟随智能体的速度。本发明可以避免复杂场景中智
一种汽车空气悬架的鲁棒控制系统及其控制方法.pdf
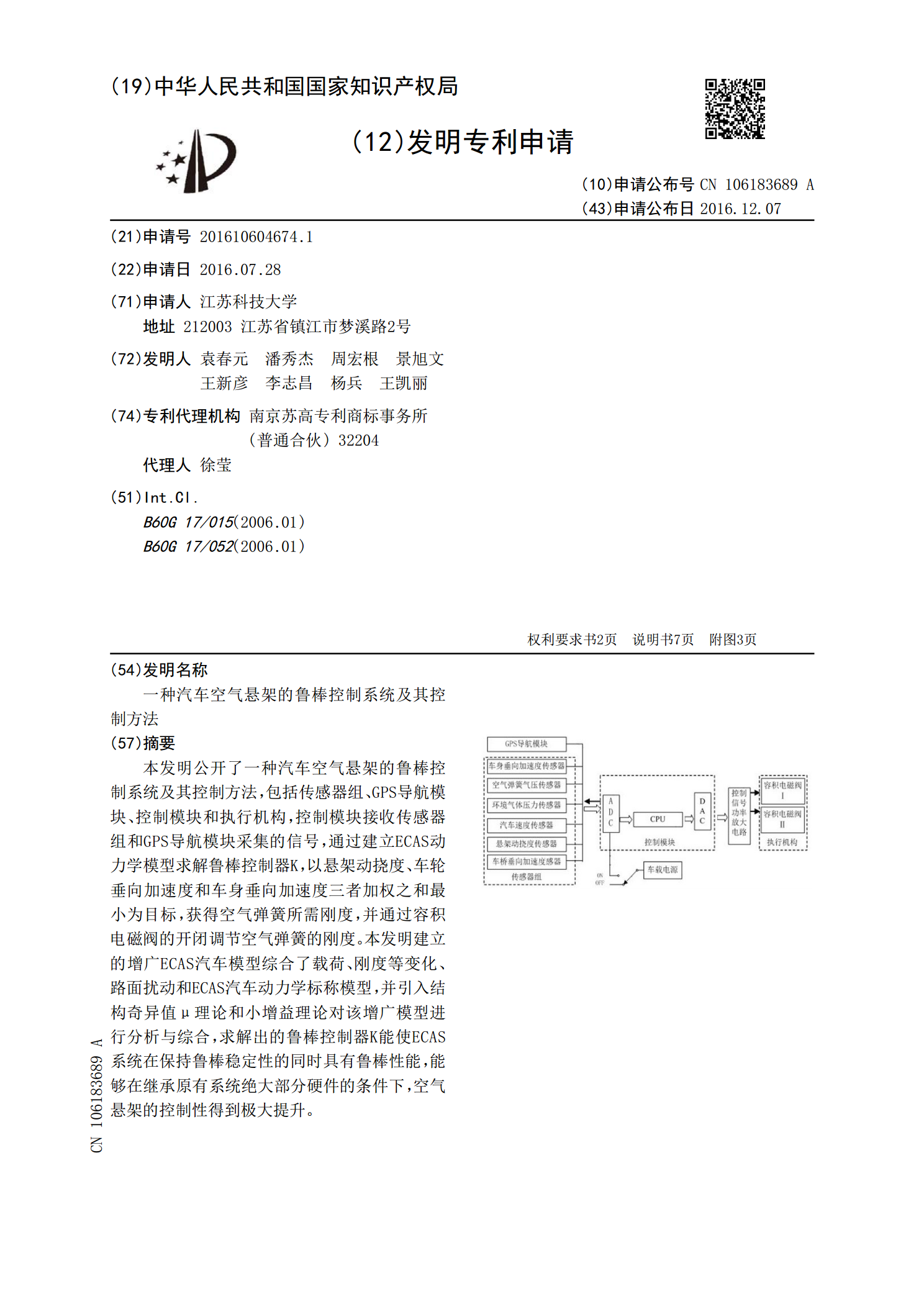
本发明公开了一种汽车空气悬架的鲁棒控制系统及其控制方法,包括传感器组、GPS导航模块、控制模块和执行机构,控制模块接收传感器组和GPS导航模块采集的信号,通过建立ECAS动力学模型求解鲁棒控制器K,以悬架动挠度、车轮垂向加速度和车身垂向加速度三者加权之和最小为目标,获得空气弹簧所需刚度,并通过容积电磁阀的开闭调节空气弹簧的刚度。本发明建立的增广ECAS汽车模型综合了载荷、刚度等变化、路面扰动和ECAS汽车动力学标称模型,并引入结构奇异值μ理论和小增益理论对该增广模型进行分析与综合,求解出的鲁棒控制器K能使