
定位方法及采集设备.pdf

子璇****君淑


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位方法及采集设备.pdf
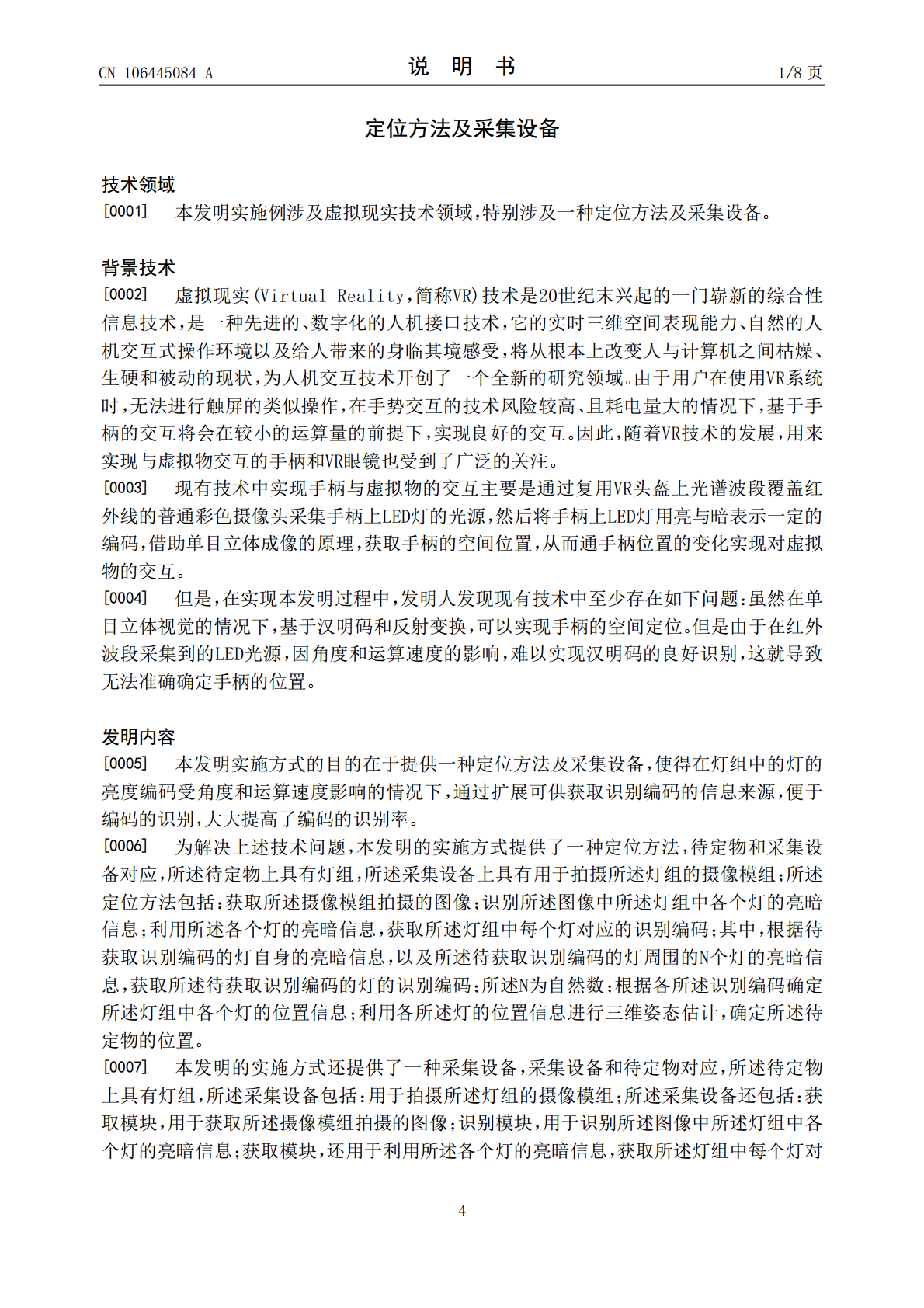
本发明实施例涉及虚拟现实技术领域,公开了一种定位方法及采集设备。本发明中,一种定位方法包括:获取所述摄像模组拍摄的图像;识别所述图像中所述灯组中各个灯的亮暗信息;利用所述各个灯的亮暗信息,获取所述灯组中每个灯对应的识别编码;其中,根据待获取识别编码的灯自身的亮暗信息,以及所述待获取识别编码的灯周围的N个灯的亮暗信息,获取所述待获取识别编码的灯的识别编码;所述N为自然数;根据各所述识别编码确定所述灯组中各个灯的位置信息;利用各所述灯的位置信息进行三维姿态估计,确定所述待定物的位置。通过本发明提供的定位方法及
模板匹配定位方法、装置、图像采集设备及存储介质.pdf
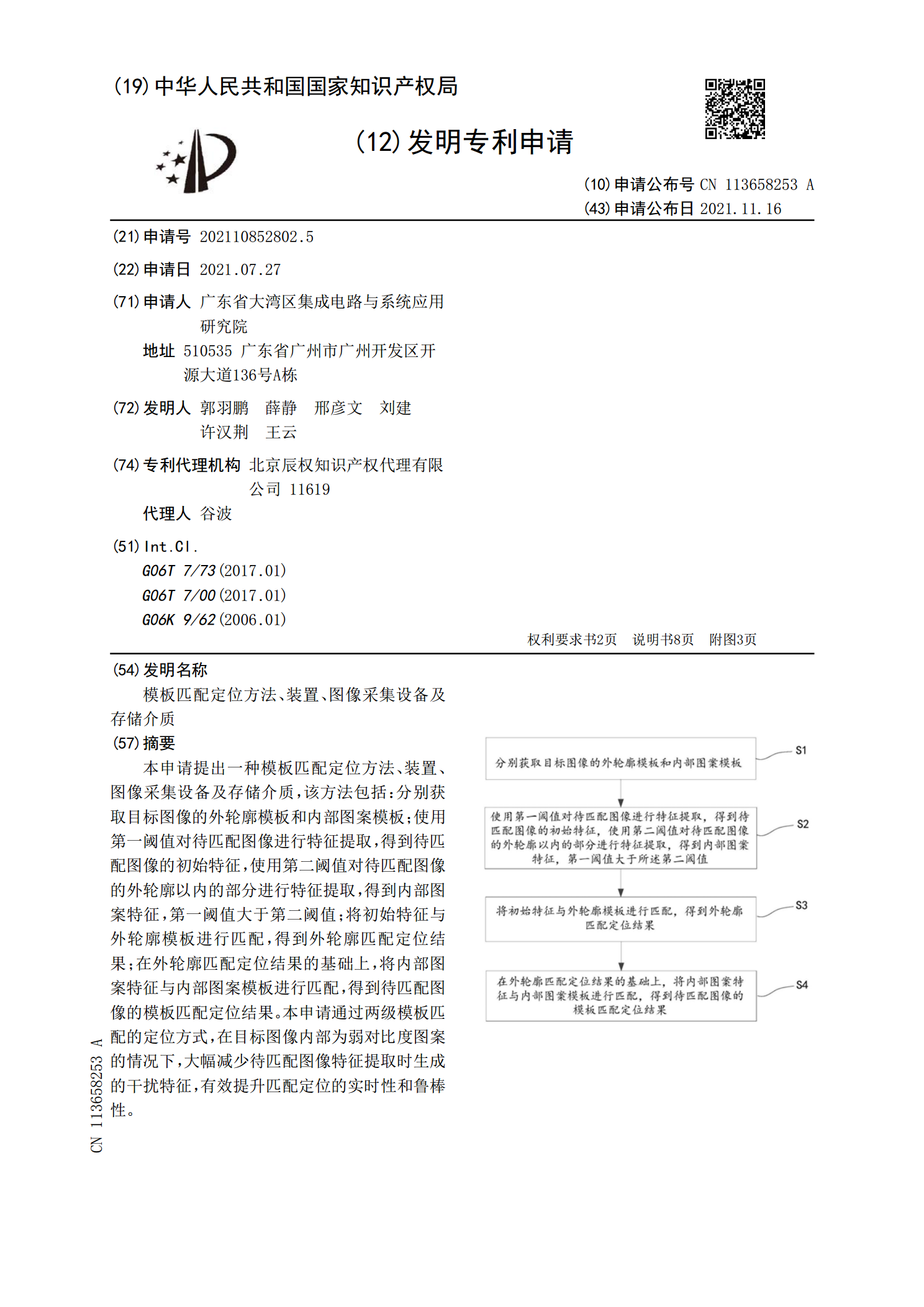
本申请提出一种模板匹配定位方法、装置、图像采集设备及存储介质,该方法包括:分别获取目标图像的外轮廓模板和内部图案模板;使用第一阈值对待匹配图像进行特征提取,得到待匹配图像的初始特征,使用第二阈值对待匹配图像的外轮廓以内的部分进行特征提取,得到内部图案特征,第一阈值大于第二阈值;将初始特征与外轮廓模板进行匹配,得到外轮廓匹配定位结果;在外轮廓匹配定位结果的基础上,将内部图案特征与内部图案模板进行匹配,得到待匹配图像的模板匹配定位结果。本申请通过两级模板匹配的定位方式,在目标图像内部为弱对比度图案的情况下,大
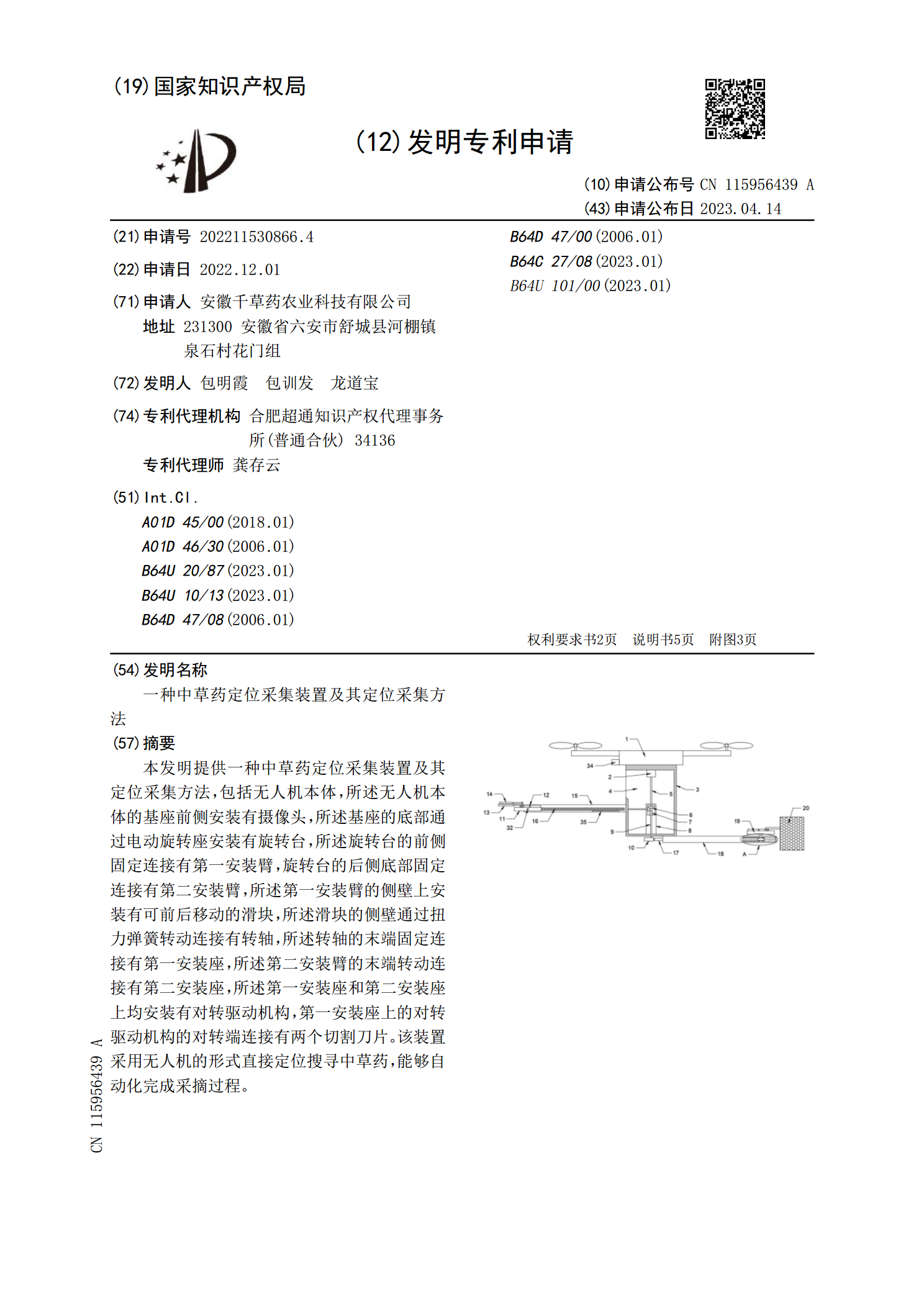
一种中草药定位采集装置及其定位采集方法.pdf
本发明提供一种中草药定位采集装置及其定位采集方法,包括无人机本体,所述无人机本体的基座前侧安装有摄像头,所述基座的底部通过电动旋转座安装有旋转台,所述旋转台的前侧固定连接有第一安装臂,旋转台的后侧底部固定连接有第二安装臂,所述第一安装臂的侧壁上安装有可前后移动的滑块,所述滑块的侧壁通过扭力弹簧转动连接有转轴,所述转轴的末端固定连接有第一安装座,所述第二安装臂的末端转动连接有第二安装座,所述第一安装座和第二安装座上均安装有对转驱动机构,第一安装座上的对转驱动机构的对转端连接有两个切割刀片。该装置采用无人机的
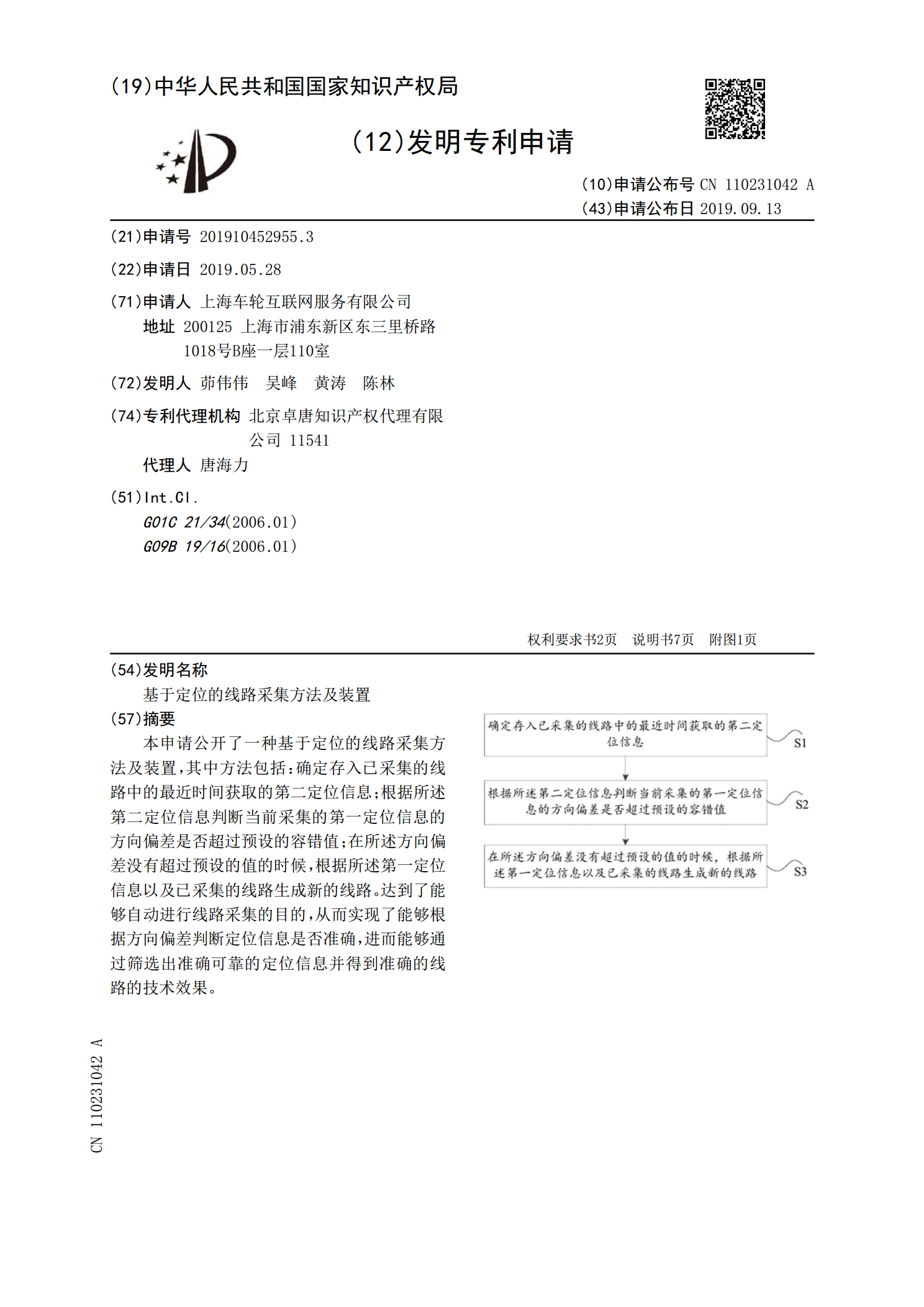
基于定位的线路采集方法及装置.pdf
本申请公开了一种基于定位的线路采集方法及装置,其中方法包括:确定存入已采集的线路中的最近时间获取的第二定位信息;根据所述第二定位信息判断当前采集的第一定位信息的方向偏差是否超过预设的容错值;在所述方向偏差没有超过预设的值的时候,根据所述第一定位信息以及已采集的线路生成新的线路。达到了能够自动进行线路采集的目的,从而实现了能够根据方向偏差判断定位信息是否准确,进而能够通过筛选出准确可靠的定位信息并得到准确的线路的技术效果。

室内定位方法、数据采集方法及系统.pdf
本发明提供室内定位方法、数据采集方法及系统。该室内定位方法包括:获取伪载波;将所述伪载波轮巡发送至预设范围内的远端单元,以由所述远端单元将所述伪载波辐射到室内;获取所述预设范围内的移动站反馈的响应消息,并根据所述响应消息中是否携带有伪载波信息,对所述移动站进行定位。本发明提供的室内定位方法、数据采集方法及系统,实现了有效的自动室内定位。