
一种多节式机械臂装置.pdf

英哲****公主

1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多节式机械臂装置.pdf
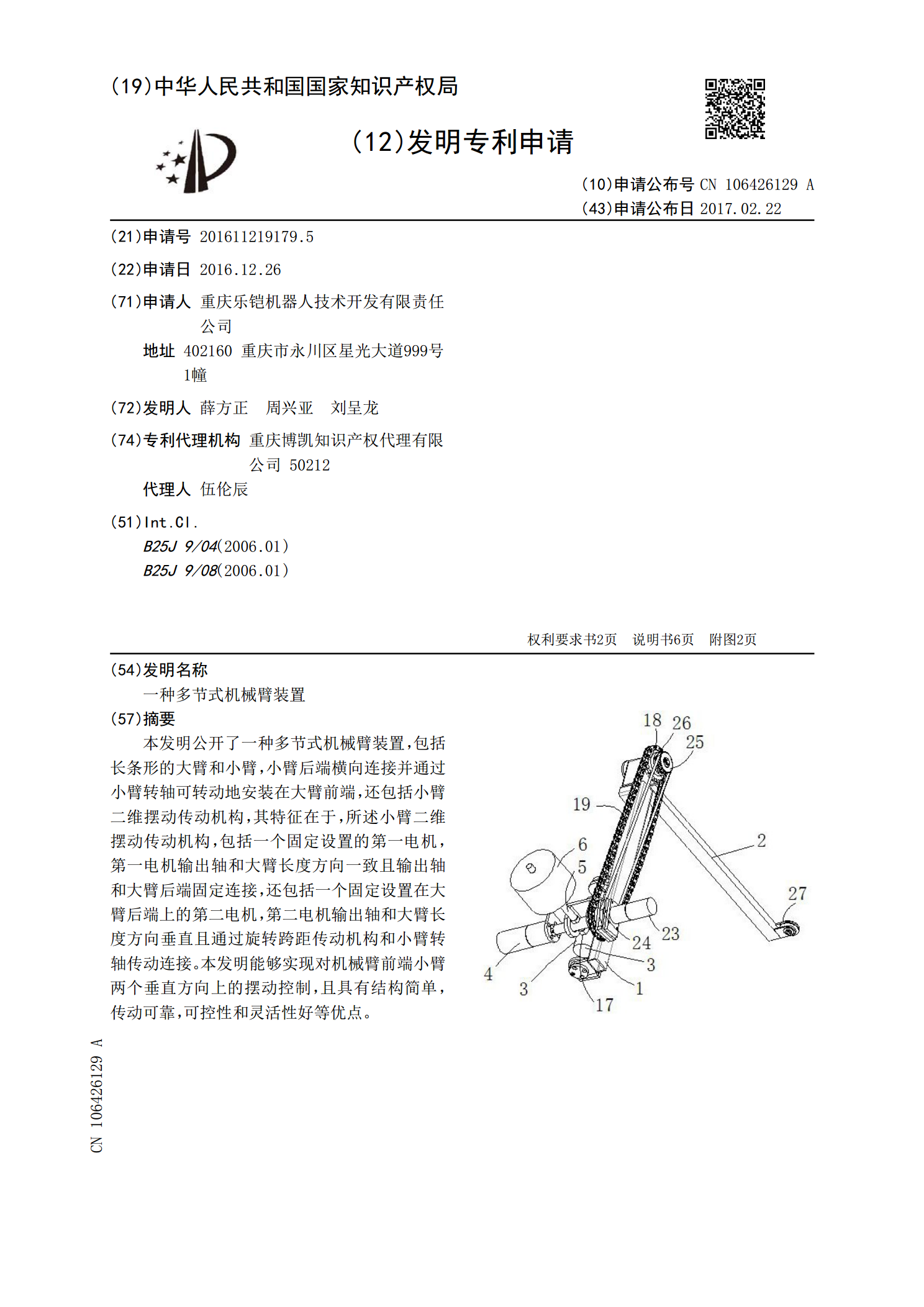
本发明公开了一种多节式机械臂装置,包括长条形的大臂和小臂,小臂后端横向连接并通过小臂转轴可转动地安装在大臂前端,还包括小臂二维摆动传动机构,其特征在于,所述小臂二维摆动传动机构,包括一个固定设置的第一电机,第一电机输出轴和大臂长度方向一致且输出轴和大臂后端固定连接,还包括一个固定设置在大臂后端上的第二电机,第二电机输出轴和大臂长度方向垂直且通过旋转跨距传动机构和小臂转轴传动连接。本发明能够实现对机械臂前端小臂两个垂直方向上的摆动控制,且具有结构简单,传动可靠,可控性和灵活性好等优点。
一种机械臂装置.pdf
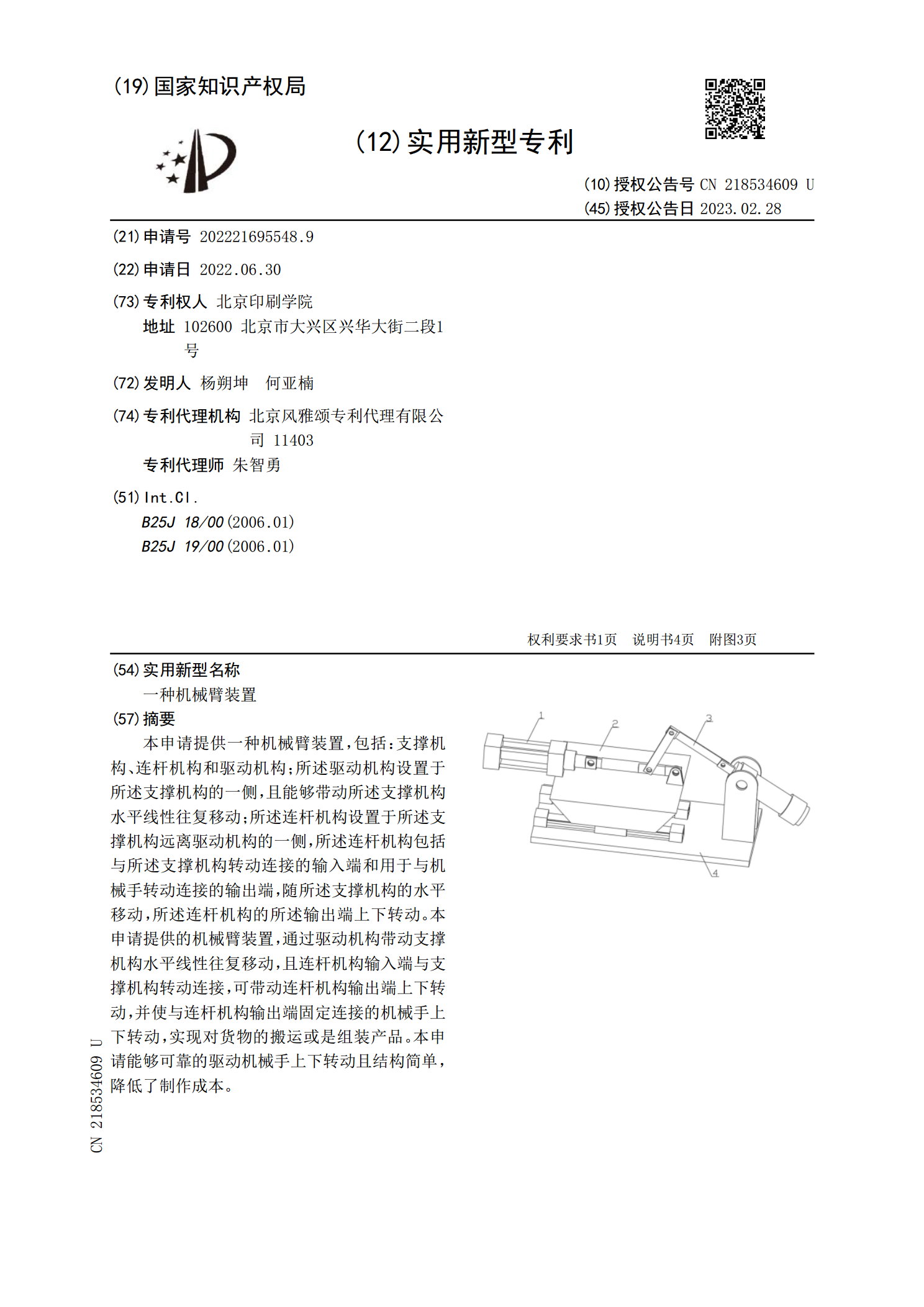
本申请提供一种机械臂装置,包括:支撑机构、连杆机构和驱动机构;所述驱动机构设置于所述支撑机构的一侧,且能够带动所述支撑机构水平线性往复移动;所述连杆机构设置于所述支撑机构远离驱动机构的一侧,所述连杆机构包括与所述支撑机构转动连接的输入端和用于与机械手转动连接的输出端,随所述支撑机构的水平移动,所述连杆机构的所述输出端上下转动。本申请提供的机械臂装置,通过驱动机构带动支撑机构水平线性往复移动,且连杆机构输入端与支撑机构转动连接,可带动连杆机构输出端上下转动,并使与连杆机构输出端固定连接的机械手上下转动,实现

一种多节式对重装置.pdf
本发明公开了一种多节式对重装置,所述的多节式对重装置包括若干段相同的分段部件,两两分段部件之间可转动的连接,每一分段部件呈长方体,其两端的每一端面上左右两侧以中心线为对称轴对称设置有两个滚轮,该对称设置的两个滚轮之间具有间隙以使对重导轨夹设于该间隙中。本发明的多节式对重装置,它能配套用于同时拥有倾斜段和直线段的井道的电梯,保证电梯对重运行时,能顺利通过导轨直线段和倾斜段交汇处的拐点位置。
一种多节式对重装置.pdf
一种控制机械臂装置.pdf
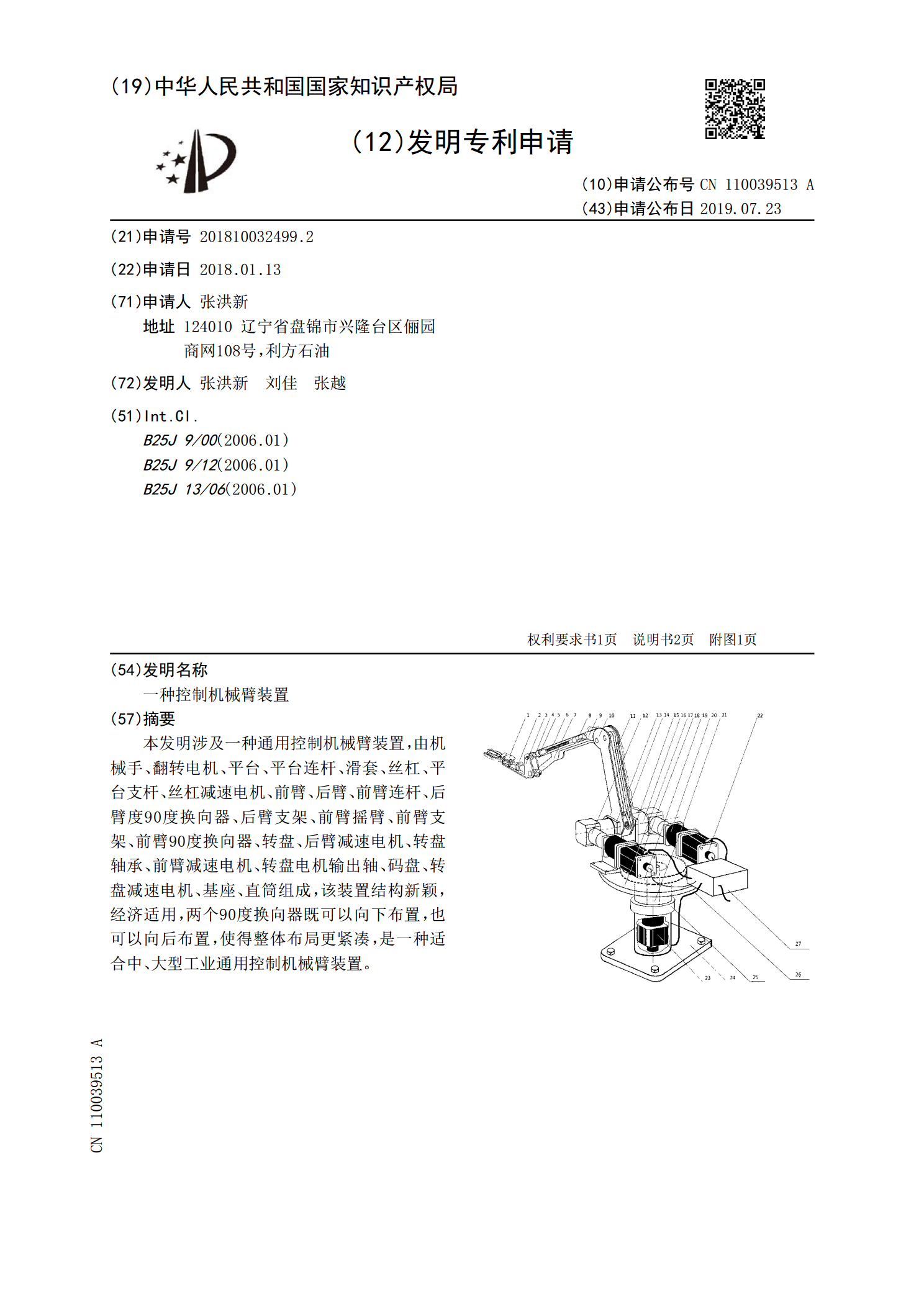
本发明涉及一种通用控制机械臂装置,由机械手、翻转电机、平台、平台连杆、滑套、丝杠、平台支杆、丝杠减速电机、前臂、后臂、前臂连杆、后臂度90度换向器、后臂支架、前臂摇臂、前臂支架、前臂90度换向器、转盘、后臂减速电机、转盘轴承、前臂减速电机、转盘电机输出轴、码盘、转盘减速电机、基座、直筒组成,该装置结构新颖,经济适用,两个90度换向器既可以向下布置,也可以向后布置,使得整体布局更紧凑,是一种适合中、大型工业通用控制机械臂装置。