
一种控制机械臂装置.pdf

fa****楠吖


1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种控制机械臂装置.pdf
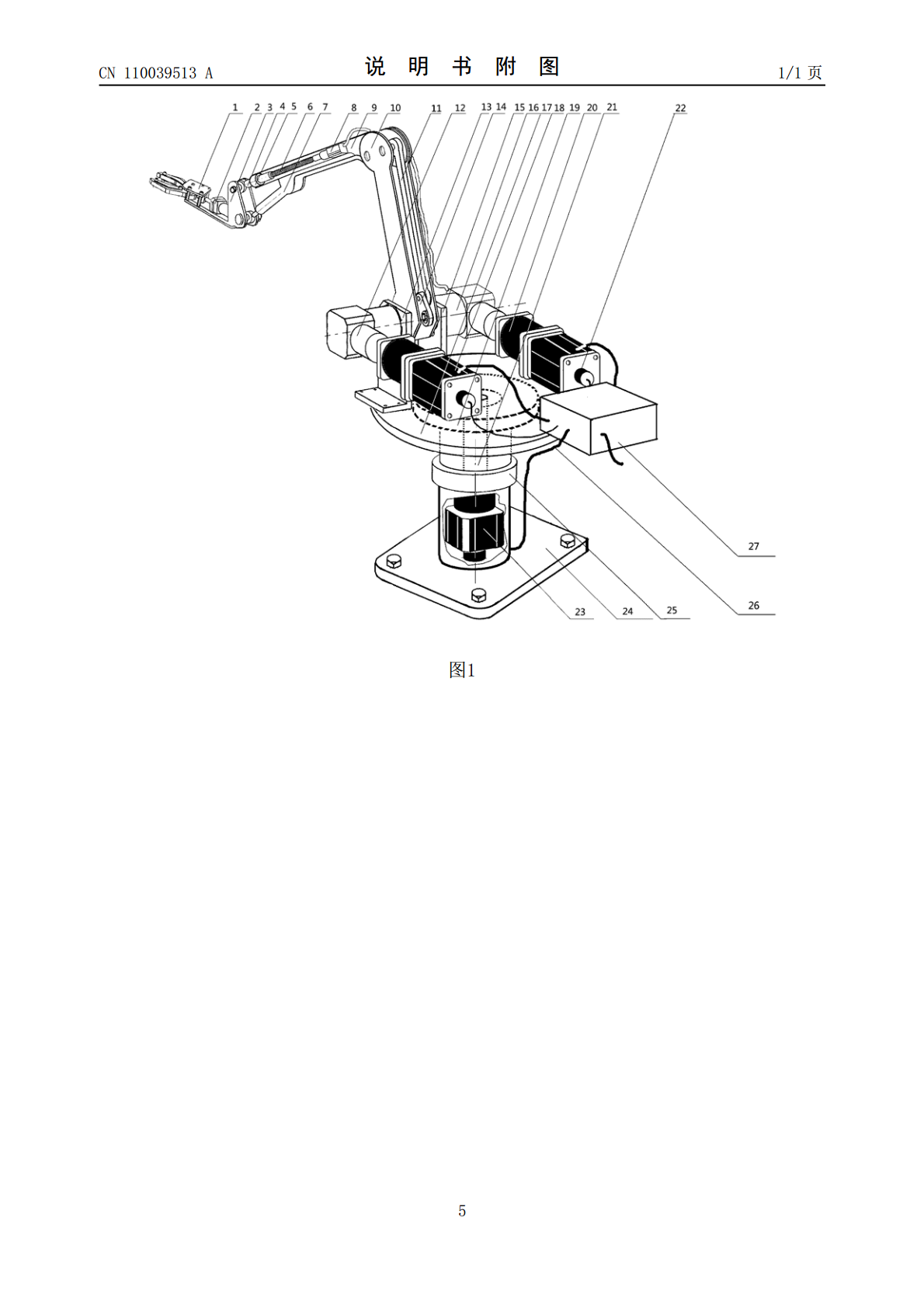
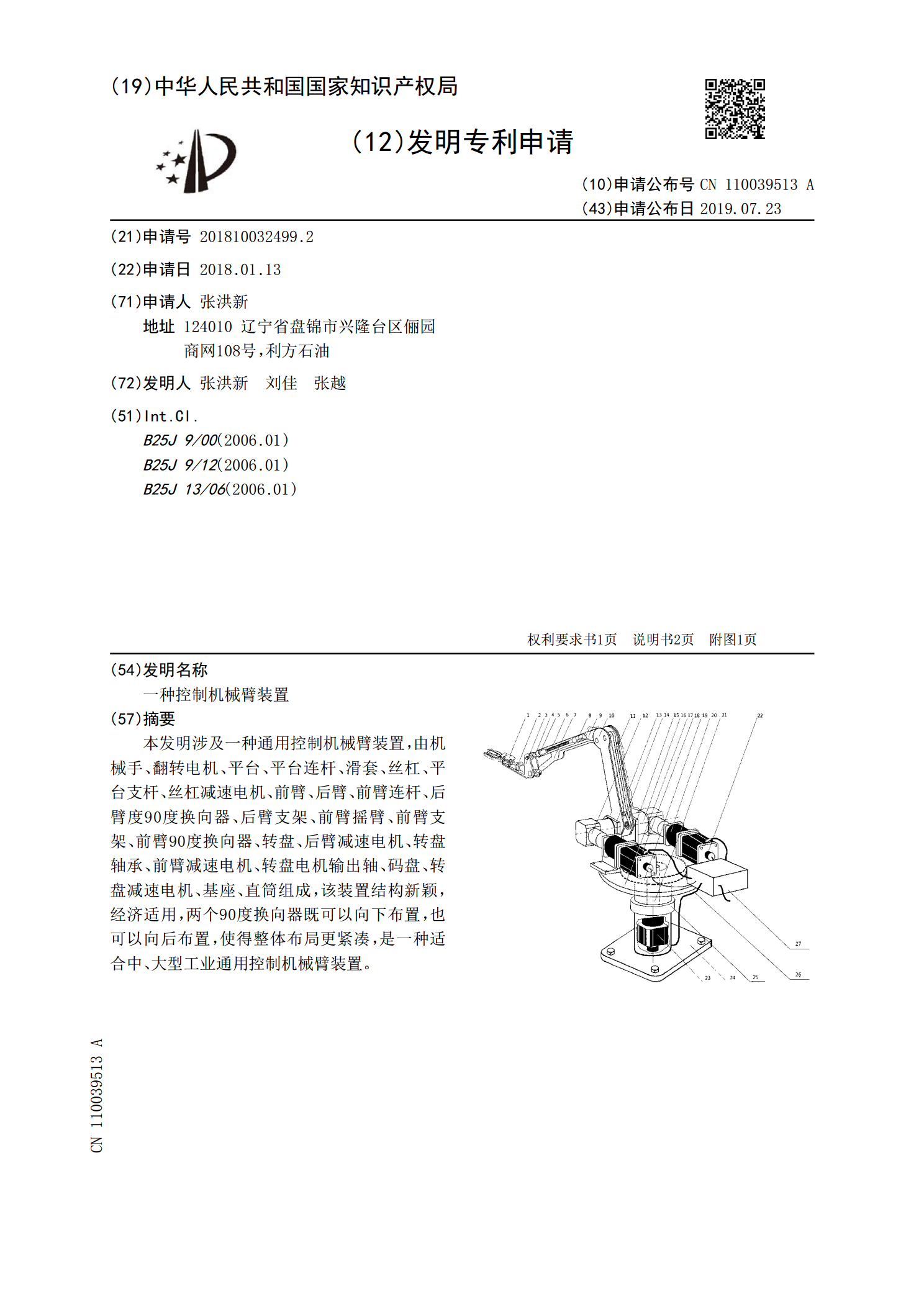
本发明涉及一种通用控制机械臂装置,由机械手、翻转电机、平台、平台连杆、滑套、丝杠、平台支杆、丝杠减速电机、前臂、后臂、前臂连杆、后臂度90度换向器、后臂支架、前臂摇臂、前臂支架、前臂90度换向器、转盘、后臂减速电机、转盘轴承、前臂减速电机、转盘电机输出轴、码盘、转盘减速电机、基座、直筒组成,该装置结构新颖,经济适用,两个90度换向器既可以向下布置,也可以向后布置,使得整体布局更紧凑,是一种适合中、大型工业通用控制机械臂装置。
一种机械臂控制装置.pdf
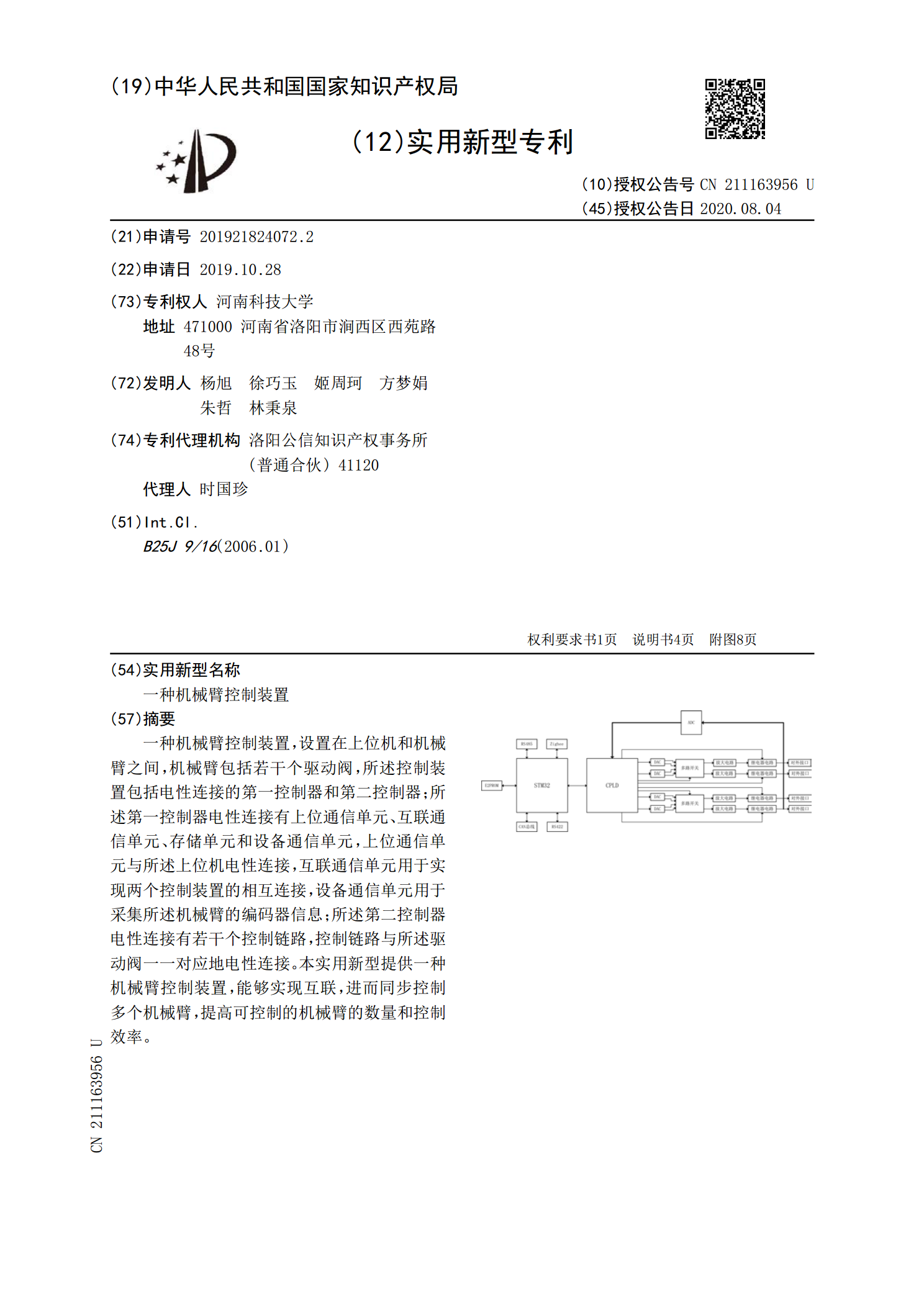
一种机械臂控制装置,设置在上位机和机械臂之间,机械臂包括若干个驱动阀,所述控制装置包括电性连接的第一控制器和第二控制器;所述第一控制器电性连接有上位通信单元、互联通信单元、存储单元和设备通信单元,上位通信单元与所述上位机电性连接,互联通信单元用于实现两个控制装置的相互连接,设备通信单元用于采集所述机械臂的编码器信息;所述第二控制器电性连接有若干个控制链路,控制链路与所述驱动阀一一对应地电性连接。本实用新型提供一种机械臂控制装置,能够实现互联,进而同步控制多个机械臂,提高可控制的机械臂的数量和控制效率。
一种机械臂控制方法、机械臂控制装置及终端设备.pdf
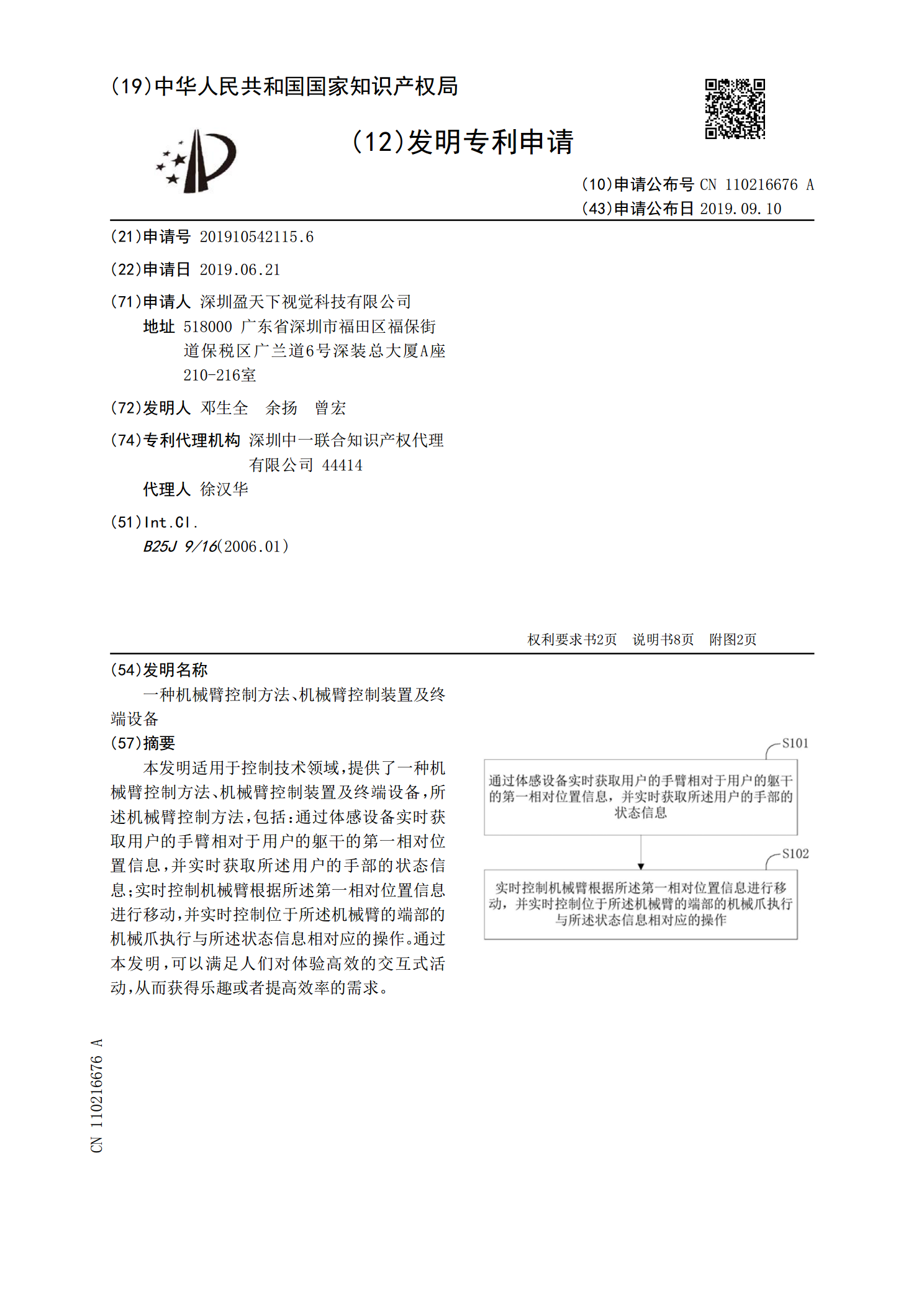
本发明适用于控制技术领域,提供了一种机械臂控制方法、机械臂控制装置及终端设备,所述机械臂控制方法,包括:通过体感设备实时获取用户的手臂相对于用户的躯干的第一相对位置信息,并实时获取所述用户的手部的状态信息;实时控制机械臂根据所述第一相对位置信息进行移动,并实时控制位于所述机械臂的端部的机械爪执行与所述状态信息相对应的操作。通过本发明,可以满足人们对体验高效的交互式活动,从而获得乐趣或者提高效率的需求。

一种机械臂的控制方法及装置.pdf
本申请提供一种机械臂的控制方法及装置,其中,所述方法包括:获取动作原子的目标动作;根据所述动作原子的目标动作,调用所述目标动作对应的执行函数;获取所述动作原子参数的参数值;根据所述执行函数以及所述动作原子参数的参数值,生成至少一个控制参数;根据所述控制参数控制所述机械臂完成所述目标动作,从而允许用户根据动作原子实现对机械臂的控制,操作灵活,易于普通用户使用。
一种机械臂以及利用手势控制该机械臂的装置.pdf
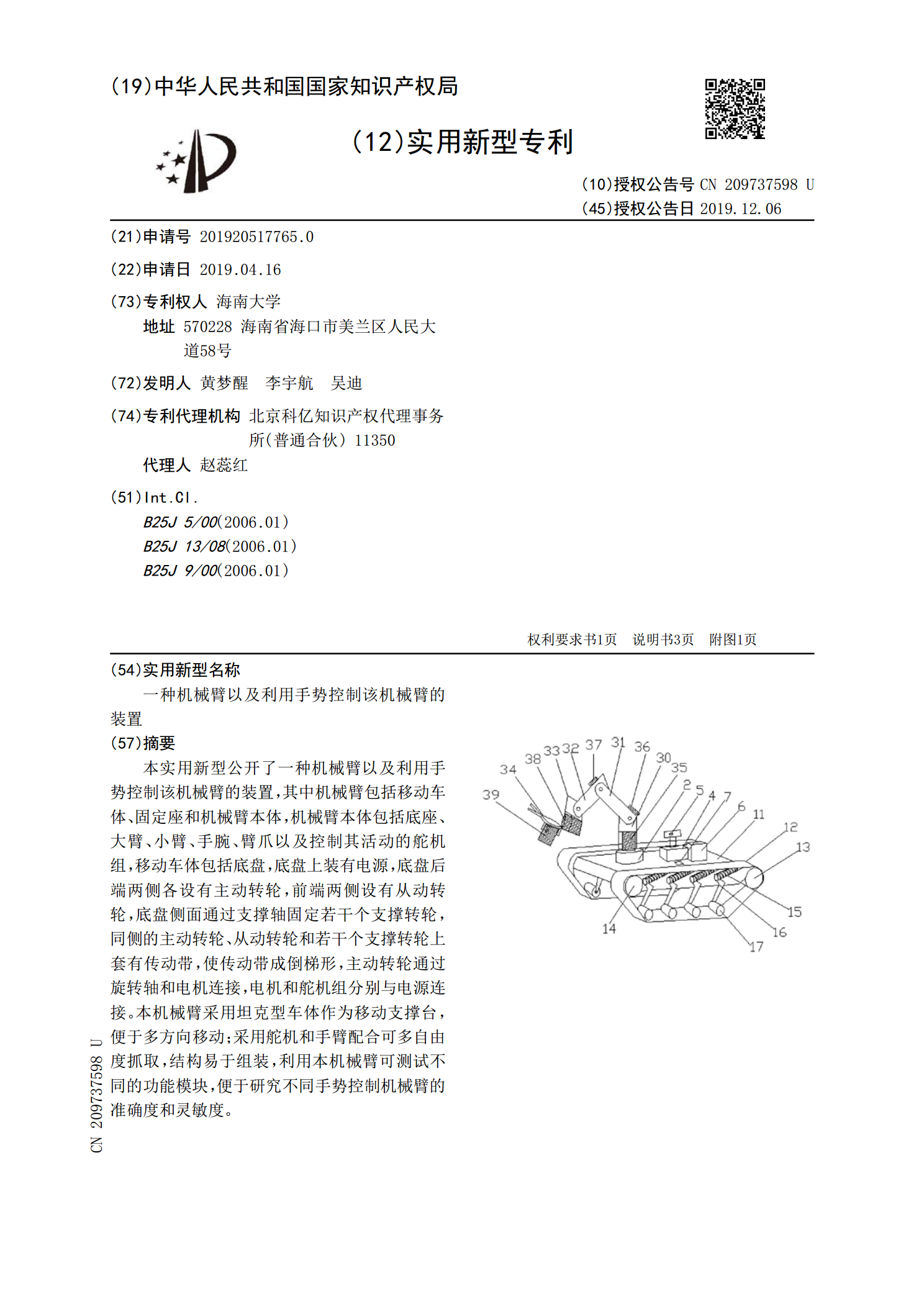
本实用新型公开了一种机械臂以及利用手势控制该机械臂的装置,其中机械臂包括移动车体、固定座和机械臂本体,机械臂本体包括底座、大臂、小臂、手腕、臂爪以及控制其活动的舵机组,移动车体包括底盘,底盘上装有电源,底盘后端两侧各设有主动转轮,前端两侧设有从动转轮,底盘侧面通过支撑轴固定若干个支撑转轮,同侧的主动转轮、从动转轮和若干个支撑转轮上套有传动带,使传动带成倒梯形,主动转轮通过旋转轴和电机连接,电机和舵机组分别与电源连接。本机械臂采用坦克型车体作为移动支撑台,便于多方向移动;采用舵机和手臂配合可多自由度抓取,结