
移动机器人的地图创建方法及基于该地图的路径规划方法.pdf

海昌****姐淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

移动机器人的地图创建方法及基于该地图的路径规划方法.pdf
本发明提供一种移动机器人的地图创建方法,包括:S1:在移动机器人的工作区域内建立直角坐标系;S2:移动机器人在工作区域内按弓字形行走;S3:获取移动机器人在点Pi的关键帧图片并保存该图片及点Pi的坐标;S4:获取移动机器人在点P'i的图片,其中,点P'i的横坐标或纵坐标与点Pi相同;S5:根据ORB算法对点Pi和点P'i获取的图片进行特征提取和匹配;S6:根据匹配结果校正移动机器人在点P'i的坐标、里程计和/或陀螺仪的数据并保存;S7:重复步骤S3至步骤S6直到完成工作区域内的地图创建。本发明通过ORB算
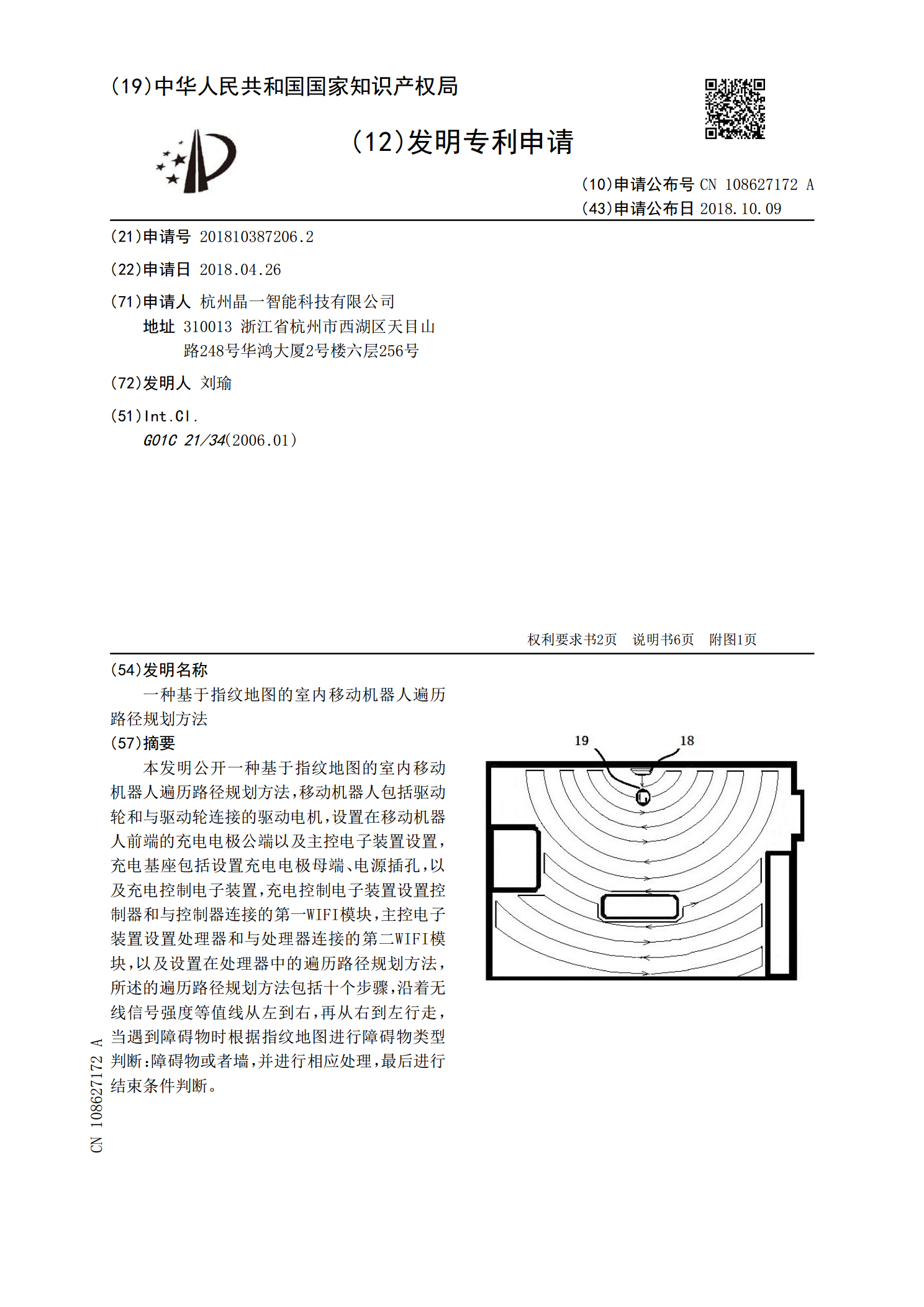
一种基于指纹地图的室内移动机器人遍历路径规划方法.pdf
本发明公开一种基于指纹地图的室内移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的遍历路径规划方法,所述的遍历路径规划方法包括十个步骤,沿着无线信号强度等值线从左到右,再从右到左行走,当遇到障碍物时根据指纹地图进行障碍物类型判断:障

移动机器人定位、地图创建及路径规划研究的综述报告.docx
移动机器人定位、地图创建及路径规划研究的综述报告移动机器人伴随着现代工业自动化的兴起得到了广泛的应用,其中定位、地图创建和路径规划技术是移动机器人领域中的重要研究方向。在这个过程中,移动机器人需要建立环境模型,识别障碍物,规划路径并进行精确定位,以便更好的完成各种任务。本文将对移动机器人定位、地图创建和路径规划技术的研究进行综述分析。一、定位技术的研究定位技术是移动机器人导航的基础,它是通过移动机器人与地图、定位设备及传感器之间的交互来确定机器人的位置和方向。目前常见的定位技术主要包括全球定位系统(GPS

地图制作和/或加工方法、地图存储装置及路径规划方法.pdf
提出一种用于车辆的地图的制作和/或加工方法,包括:提供并存储静态道路元素;选取规划辅助元素,并存储规划辅助元素或用于指向规划辅助元素的信息,规划辅助元素表示从静态道路元素或其子元素中选取的与车辆的通行安全性相关联的元素;提供数据接口,经由其能够直接读取规划辅助元素。提出一种地图存储装置,包括:静态道路元素存储单元(1)、存储规划辅助元素或用于指向规划辅助元素的信息的规划辅助元素存储单元(2)及用于经由数据接口读取数据的接口单元(3)。还提出一种地图的使用方法及一种为自动驾驶车辆进行路径规划的路径规划方法。
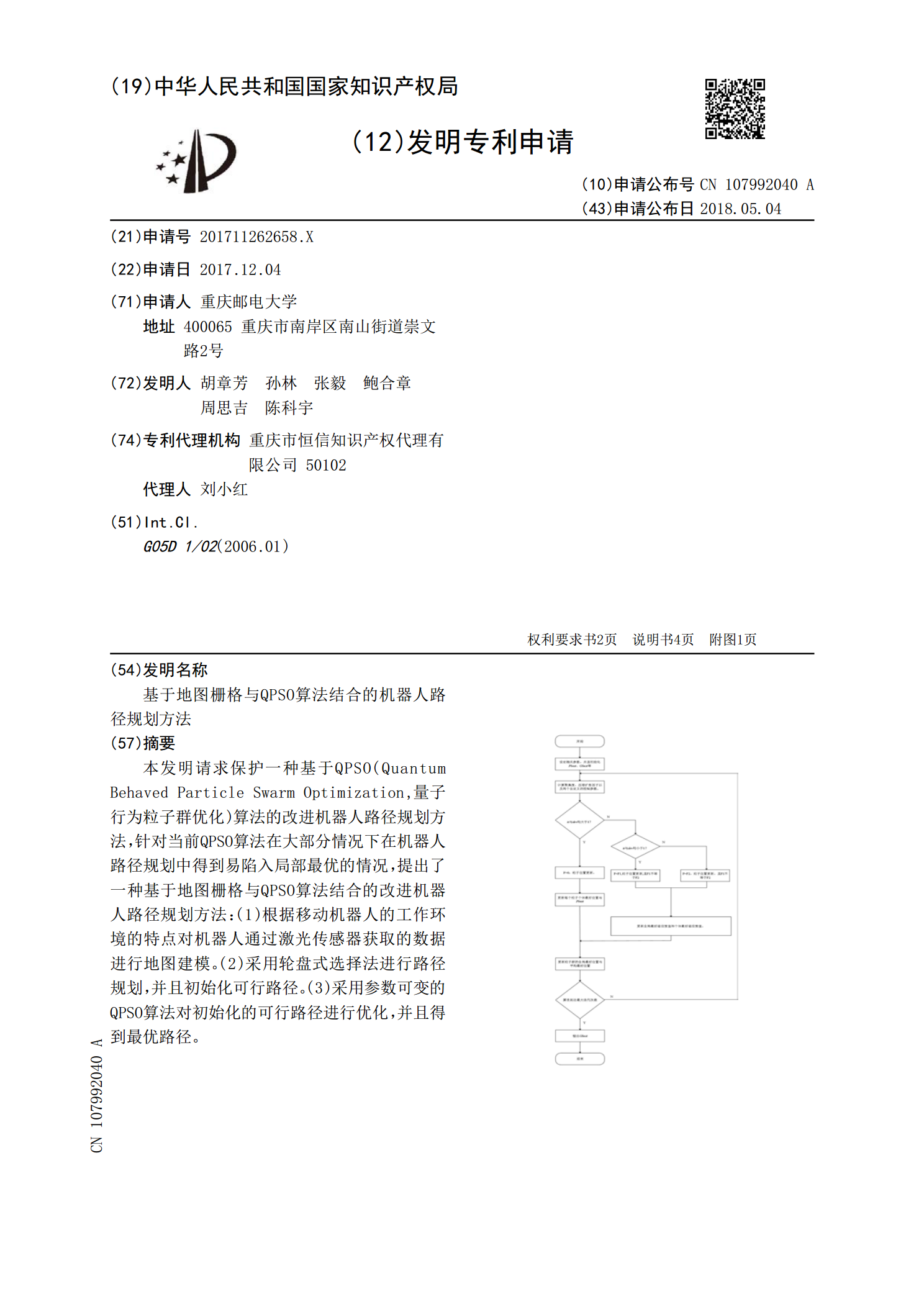
基于地图栅格与QPSO算法结合的机器人路径规划方法.pdf
本发明请求保护一种基于QPSO(QuantumBehavedParticleSwarmOptimization,量子行为粒子群优化)算法的改进机器人路径规划方法,针对当前QPSO算法在大部分情况下在机器人路径规划中得到易陷入局部最优的情况,提出了一种基于地图栅格与QPSO算法结合的改进机器人路径规划方法:(1)根据移动机器人的工作环境的特点对机器人通过激光传感器获取的数据进行地图建模。(2)采用轮盘式选择法进行路径规划,并且初始化可行路径。(3)采用参数可变的QPSO算法对初始化的可行路径进行优化