
一种基于指纹地图的室内移动机器人遍历路径规划方法.pdf

海昌****姐淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于指纹地图的室内移动机器人遍历路径规划方法.pdf
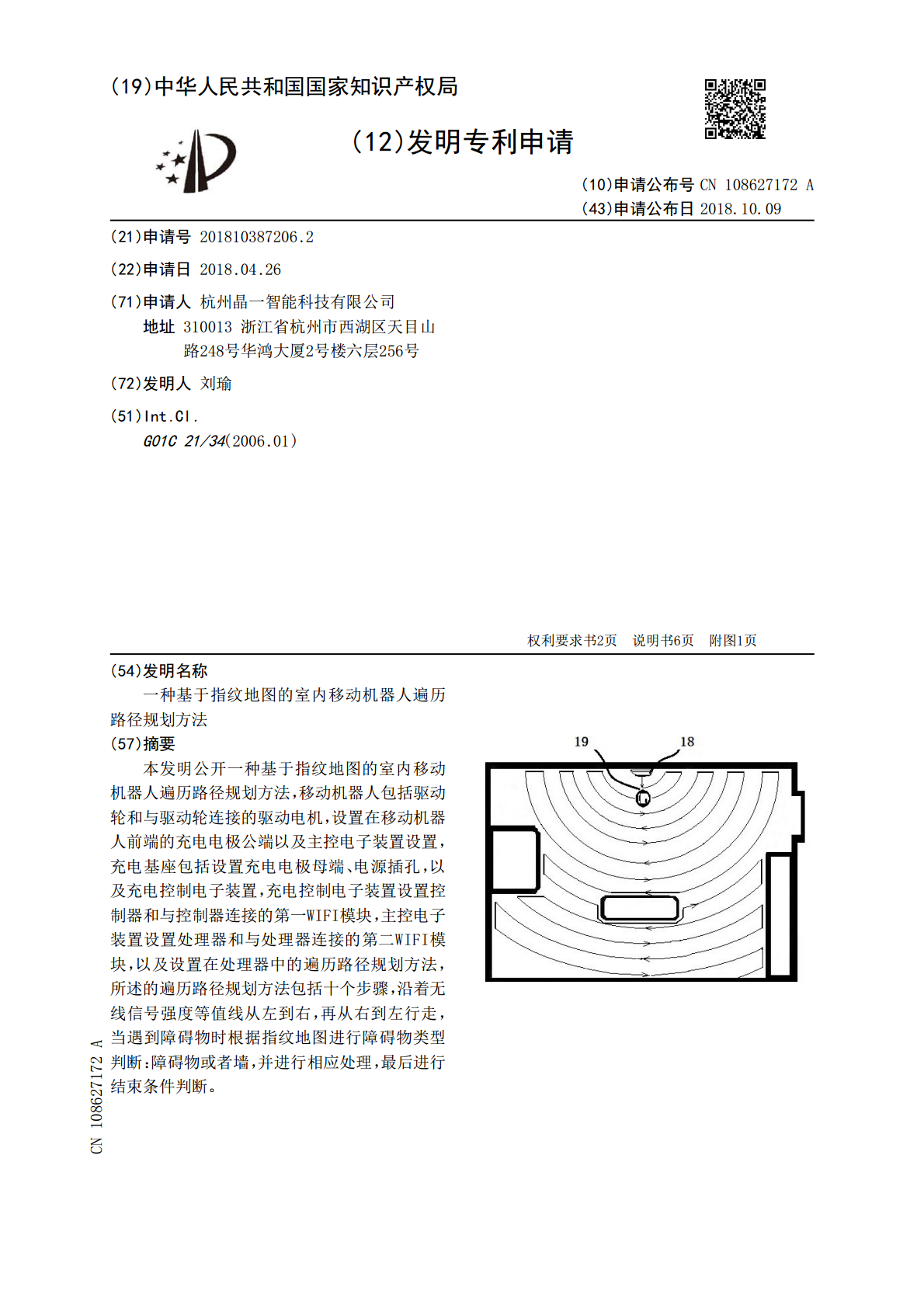
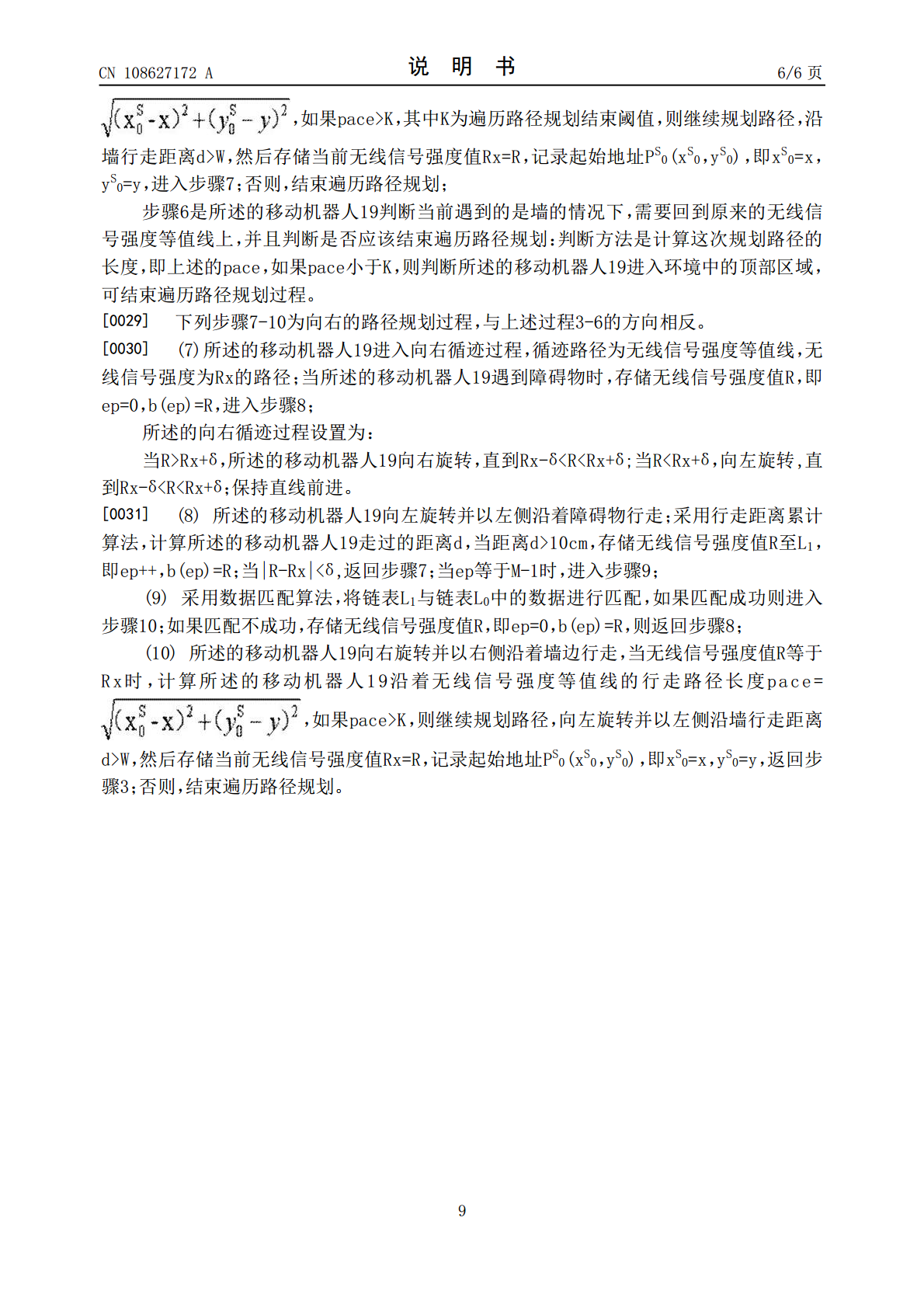
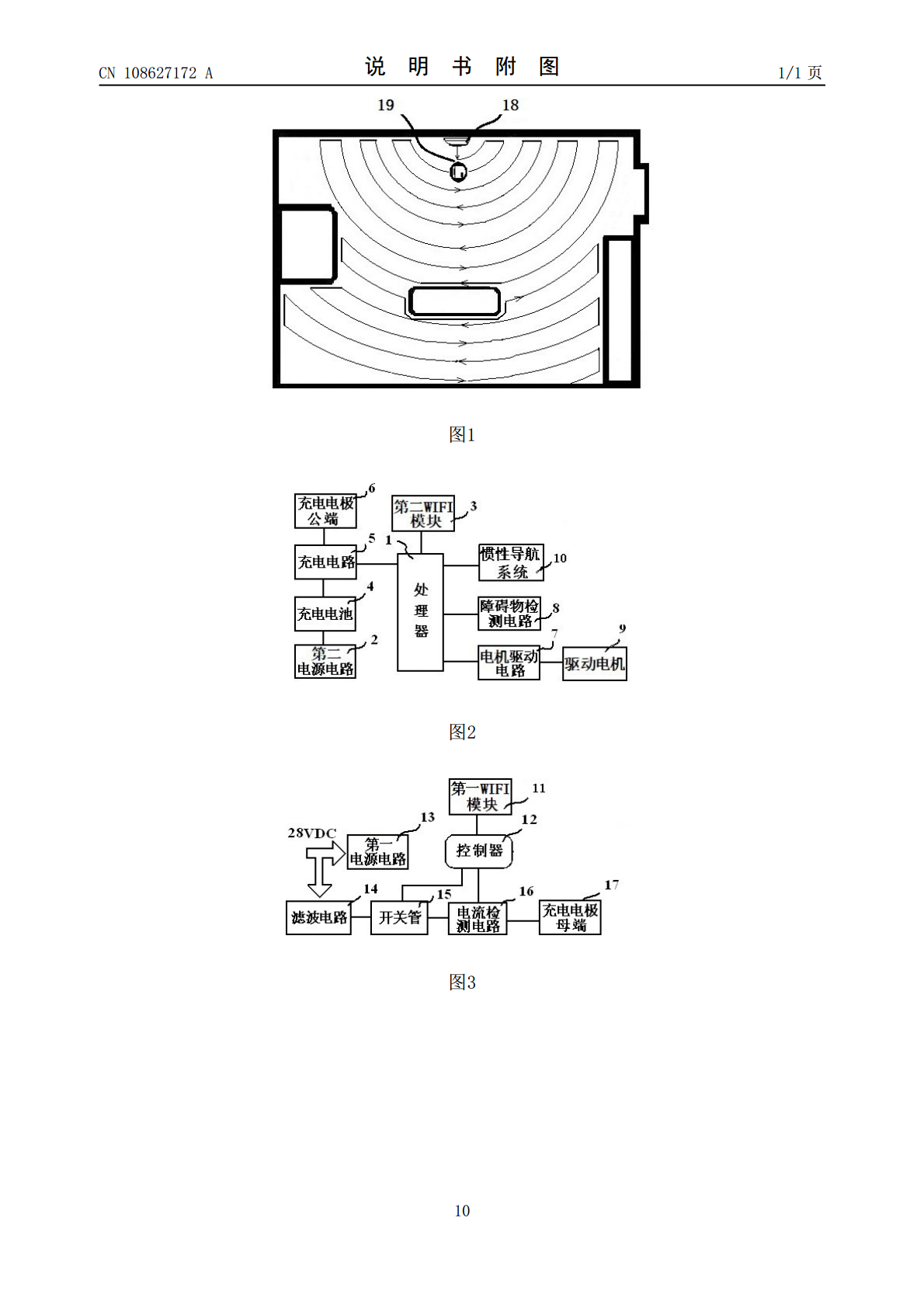
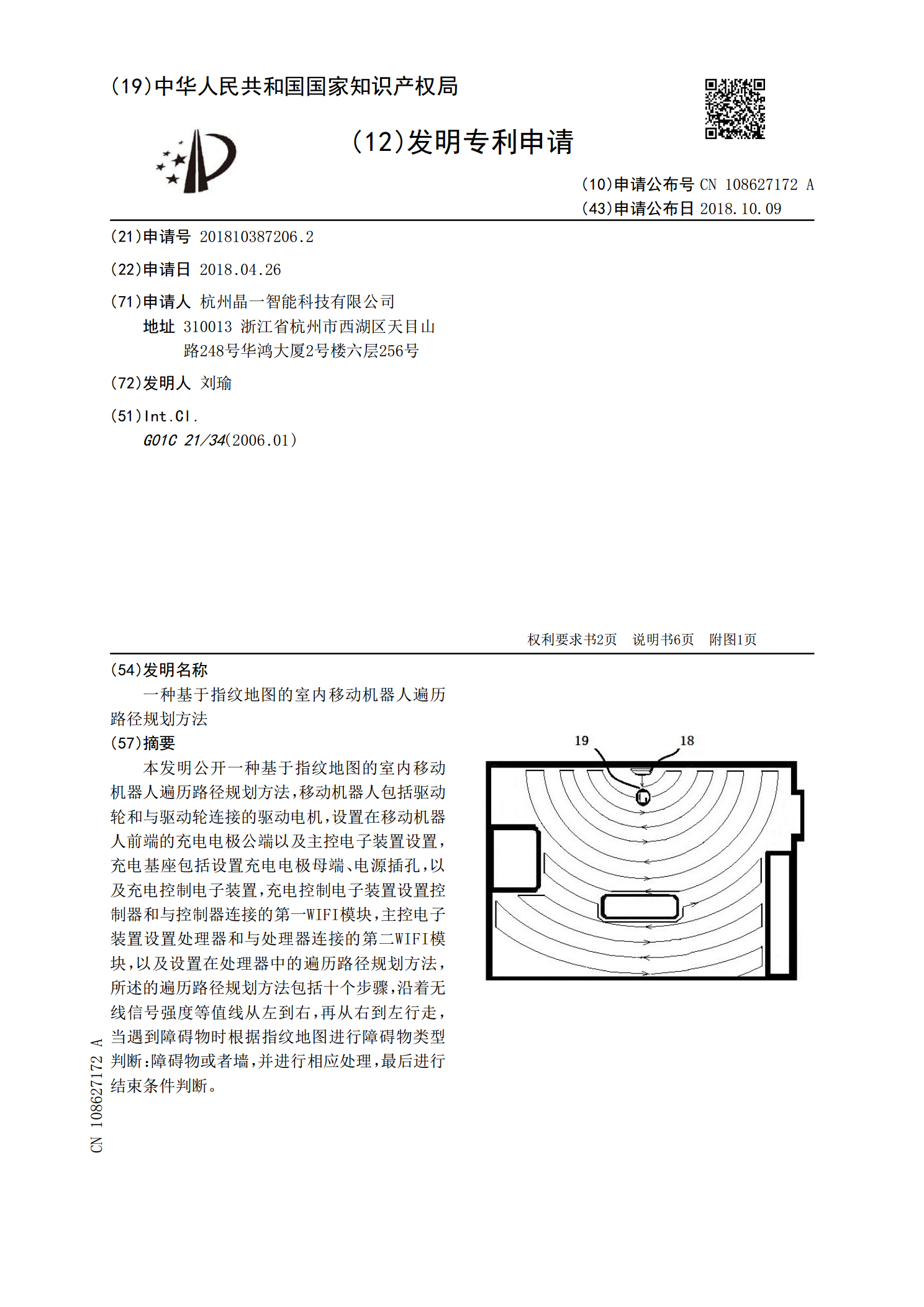
本发明公开一种基于指纹地图的室内移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的遍历路径规划方法,所述的遍历路径规划方法包括十个步骤,沿着无线信号强度等值线从左到右,再从右到左行走,当遇到障碍物时根据指纹地图进行障碍物类型判断:障
一种室内移动机器人的指纹地图构建方法.pdf
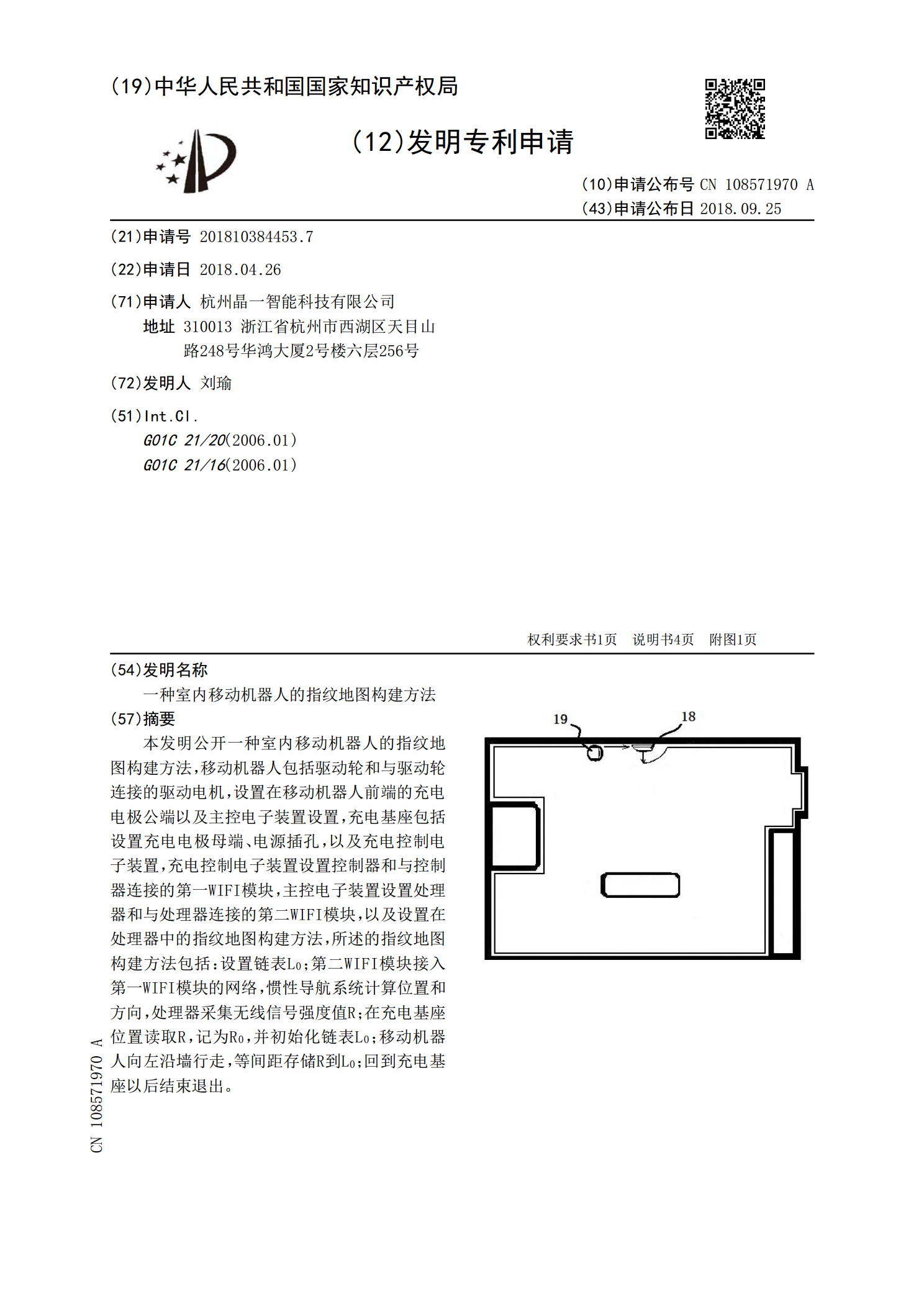
本发明公开一种室内移动机器人的指纹地图构建方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的指纹地图构建方法,所述的指纹地图构建方法包括:设置链表L
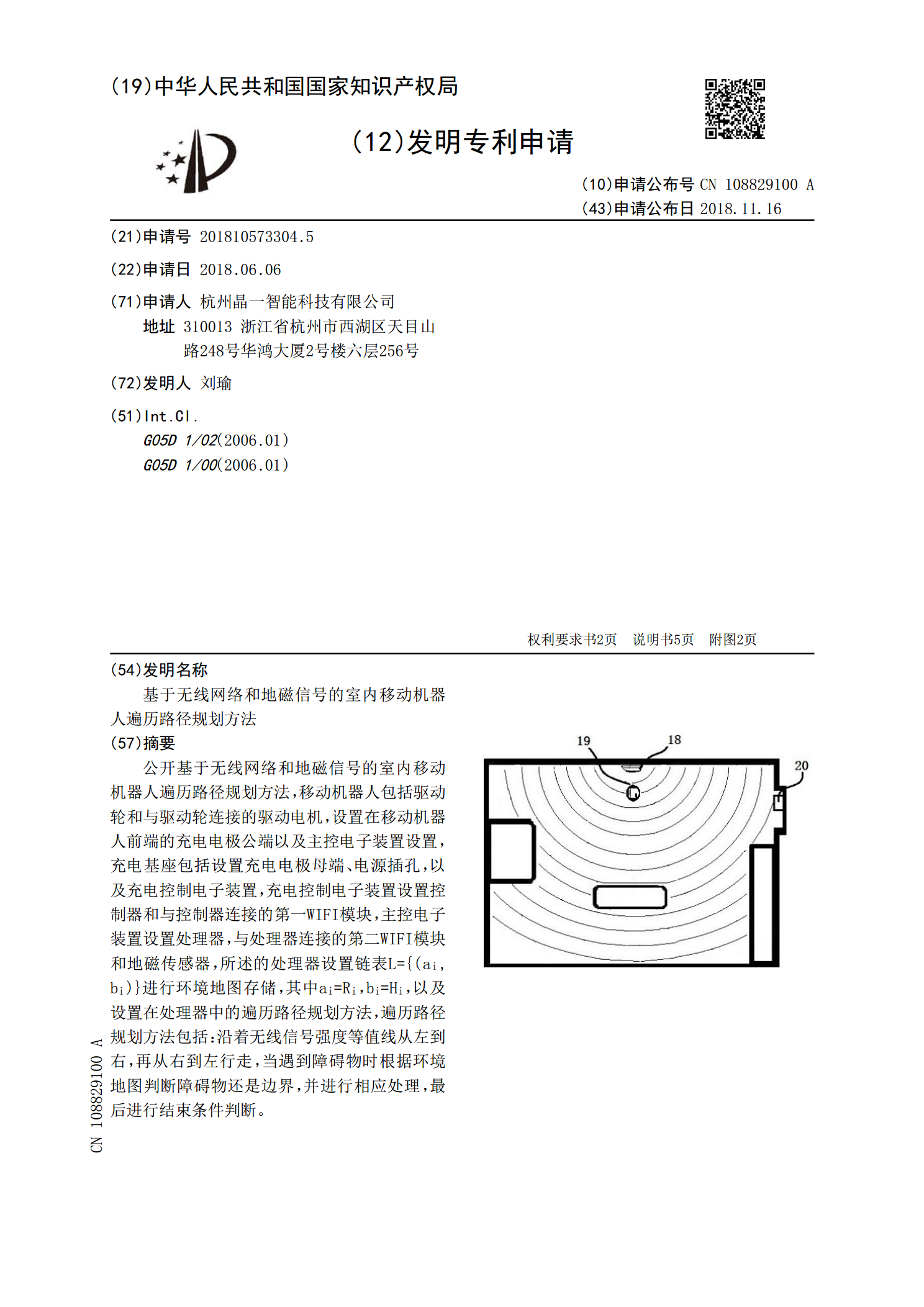
基于无线网络和地磁信号的室内移动机器人遍历路径规划方法.pdf
公开基于无线网络和地磁信号的室内移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器,与处理器连接的第二WIFI模块和地磁传感器,所述的处理器设置链表L={(a

移动机器人的地图创建方法及基于该地图的路径规划方法.pdf
本发明提供一种移动机器人的地图创建方法,包括:S1:在移动机器人的工作区域内建立直角坐标系;S2:移动机器人在工作区域内按弓字形行走;S3:获取移动机器人在点Pi的关键帧图片并保存该图片及点Pi的坐标;S4:获取移动机器人在点P'i的图片,其中,点P'i的横坐标或纵坐标与点Pi相同;S5:根据ORB算法对点Pi和点P'i获取的图片进行特征提取和匹配;S6:根据匹配结果校正移动机器人在点P'i的坐标、里程计和/或陀螺仪的数据并保存;S7:重复步骤S3至步骤S6直到完成工作区域内的地图创建。本发明通过ORB算
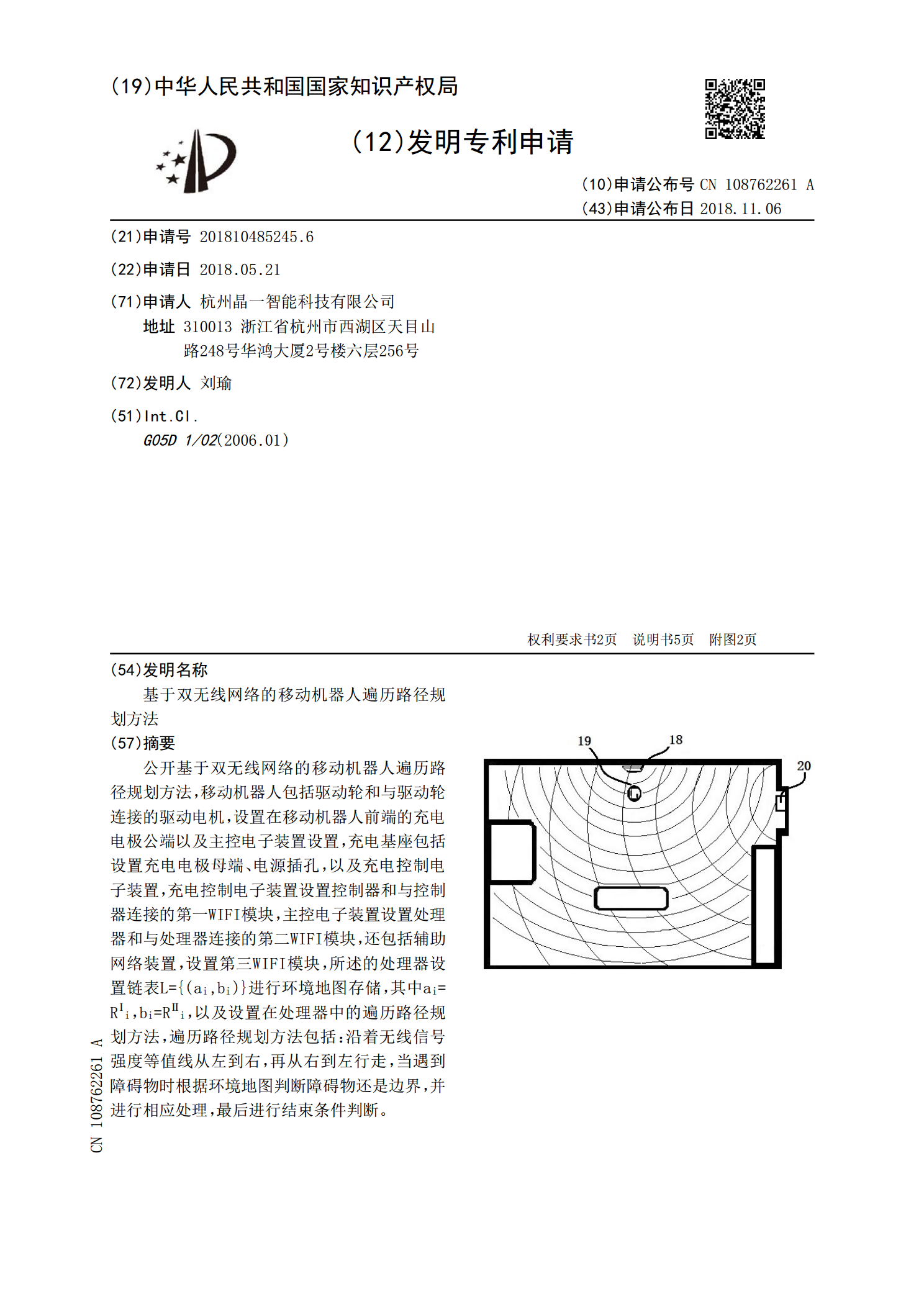
基于双无线网络的移动机器人遍历路径规划方法.pdf
公开基于双无线网络的移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,还包括辅助网络装置,设置第三WIFI模块,所述的处理器设置链表L={(a