
可重构多足机器人.pdf

睿德****找我


1/8

2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

可重构多足机器人.pdf
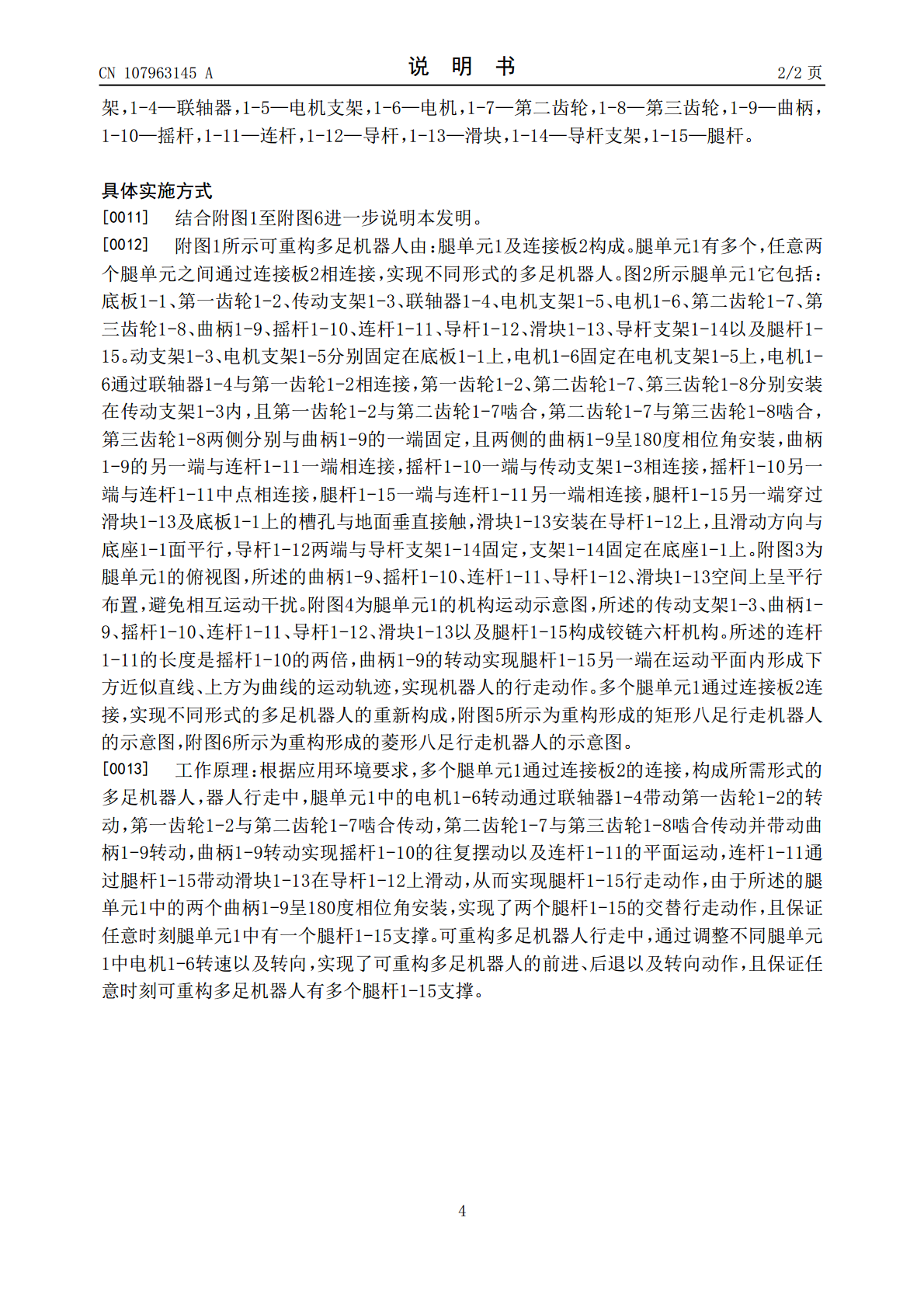
本发明涉及一种可重构多足机器人,它由腿单元及连接板构成,腿单元有多个,任意两个腿单元之间通过连接板相连接,实现不同形式的多足机器人。可重构多足机器人的腿单元由单个电机驱动两侧腿杆实现交替行走动作。可重构多足机器人行走时,任意时刻均有多个腿杆支撑地面,保证了机器人稳定性。通过控制不同腿单元电机的转速和转向,实现机器人的前进、后退以及转向。本发明结构及控制简单,具有较强的运动稳定性及不同环境的适应性,在军事、勘探、娱乐等领域,具有很强的实用价值。

可重构多足机器人.pdf
本发明涉及一种可重构多足机器人,它由腿单元及连接板构成,腿单元有多个,任意两个腿单元之间通过连接板相连接,实现不同形式的多足机器人。可重构多足机器人的腿单元由单个电机驱动两侧腿杆实现交替行走动作。可重构多足机器人行走时,任意时刻均有多个腿杆支撑地面,保证了机器人稳定性。通过控制不同腿单元电机的转速和转向,实现机器人的前进、后退以及转向。本发明结构及控制简单,具有较强的运动稳定性及不同环境的适应性,在军事、勘探、娱乐等领域,具有很强的实用价值。
一种具有多种运动模式的可重构双足机器人.pdf
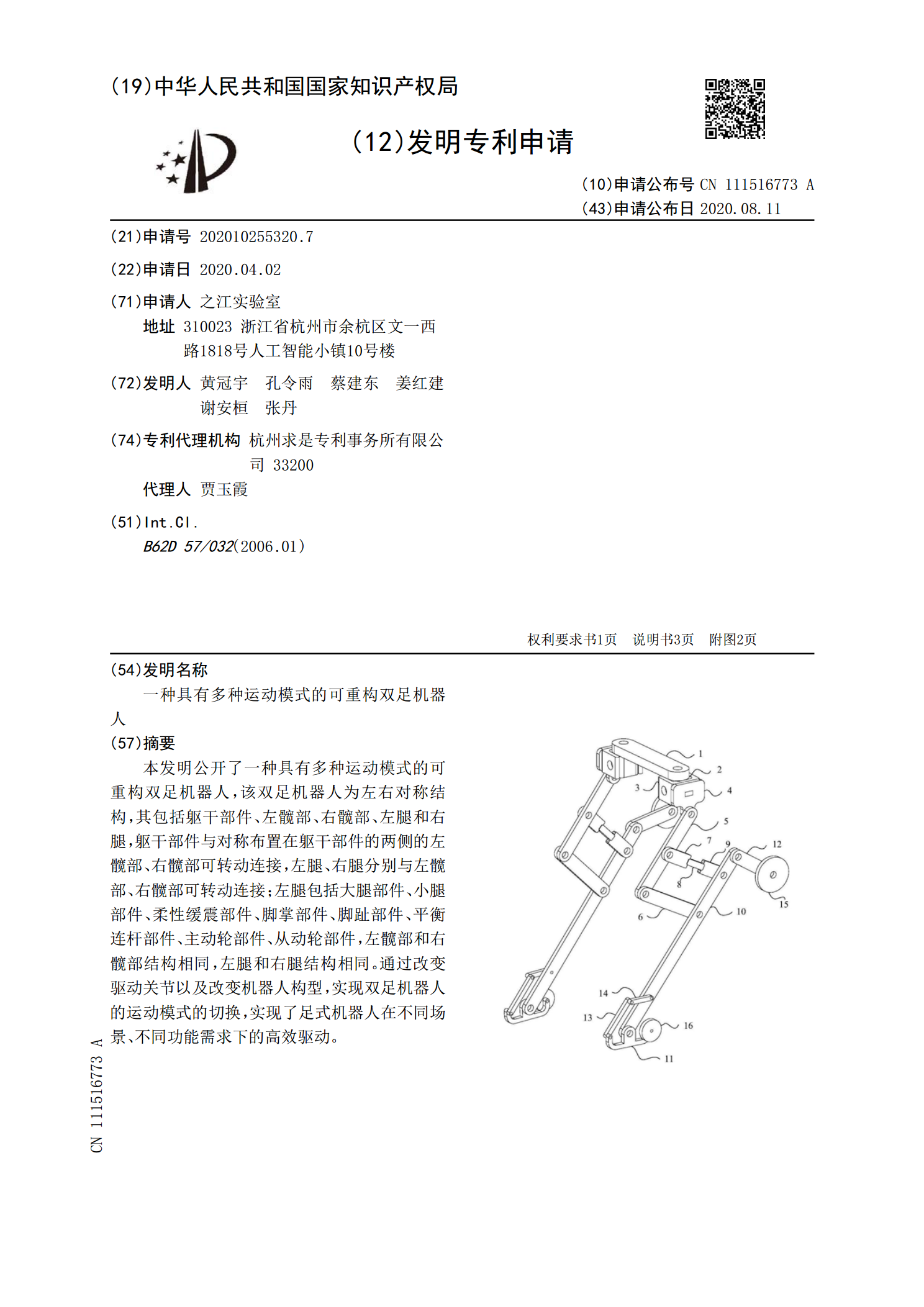
本发明公开了一种具有多种运动模式的可重构双足机器人,该双足机器人为左右对称结构,其包括躯干部件、左髋部、右髋部、左腿和右腿,躯干部件与对称布置在躯干部件的两侧的左髋部、右髋部可转动连接,左腿、右腿分别与左髋部、右髋部可转动连接;左腿包括大腿部件、小腿部件、柔性缓震部件、脚掌部件、脚趾部件、平衡连杆部件、主动轮部件、从动轮部件,左髋部和右髋部结构相同,左腿和右腿结构相同。通过改变驱动关节以及改变机器人构型,实现双足机器人的运动模式的切换,实现了足式机器人在不同场景、不同功能需求下的高效驱动。
多足机械转向结构多足机器人.pdf
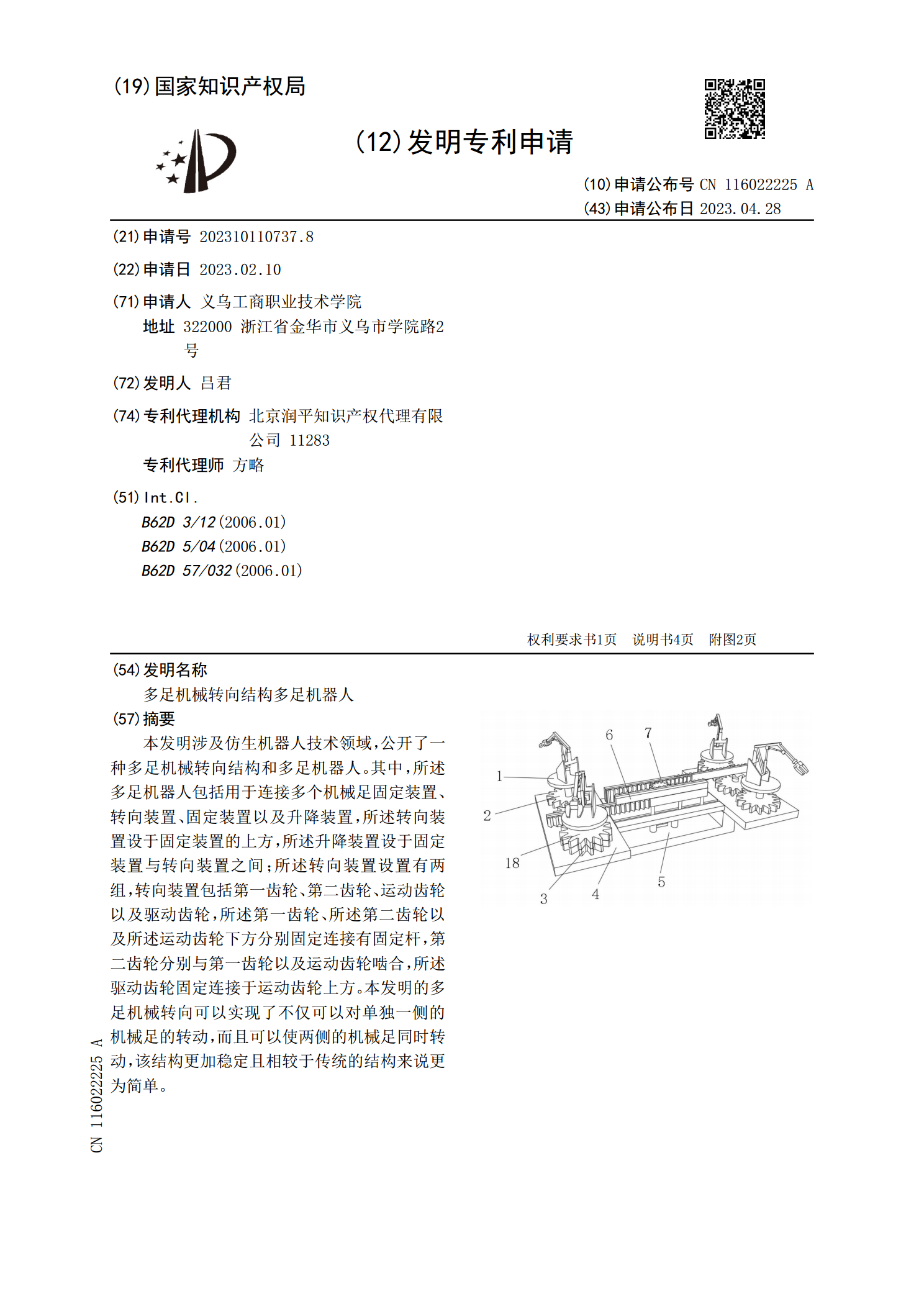
本发明涉及仿生机器人技术领域,公开了一种多足机械转向结构和多足机器人。其中,所述多足机器人包括用于连接多个机械足固定装置、转向装置、固定装置以及升降装置,所述转向装置设于固定装置的上方,所述升降装置设于固定装置与转向装置之间;所述转向装置设置有两组,转向装置包括第一齿轮、第二齿轮、运动齿轮以及驱动齿轮,所述第一齿轮、所述第二齿轮以及所述运动齿轮下方分别固定连接有固定杆,第二齿轮分别与第一齿轮以及运动齿轮啮合,所述驱动齿轮固定连接于运动齿轮上方。本发明的多足机械转向可以实现了不仅可以对单独一侧的机械足的转动
多足机器人.pdf
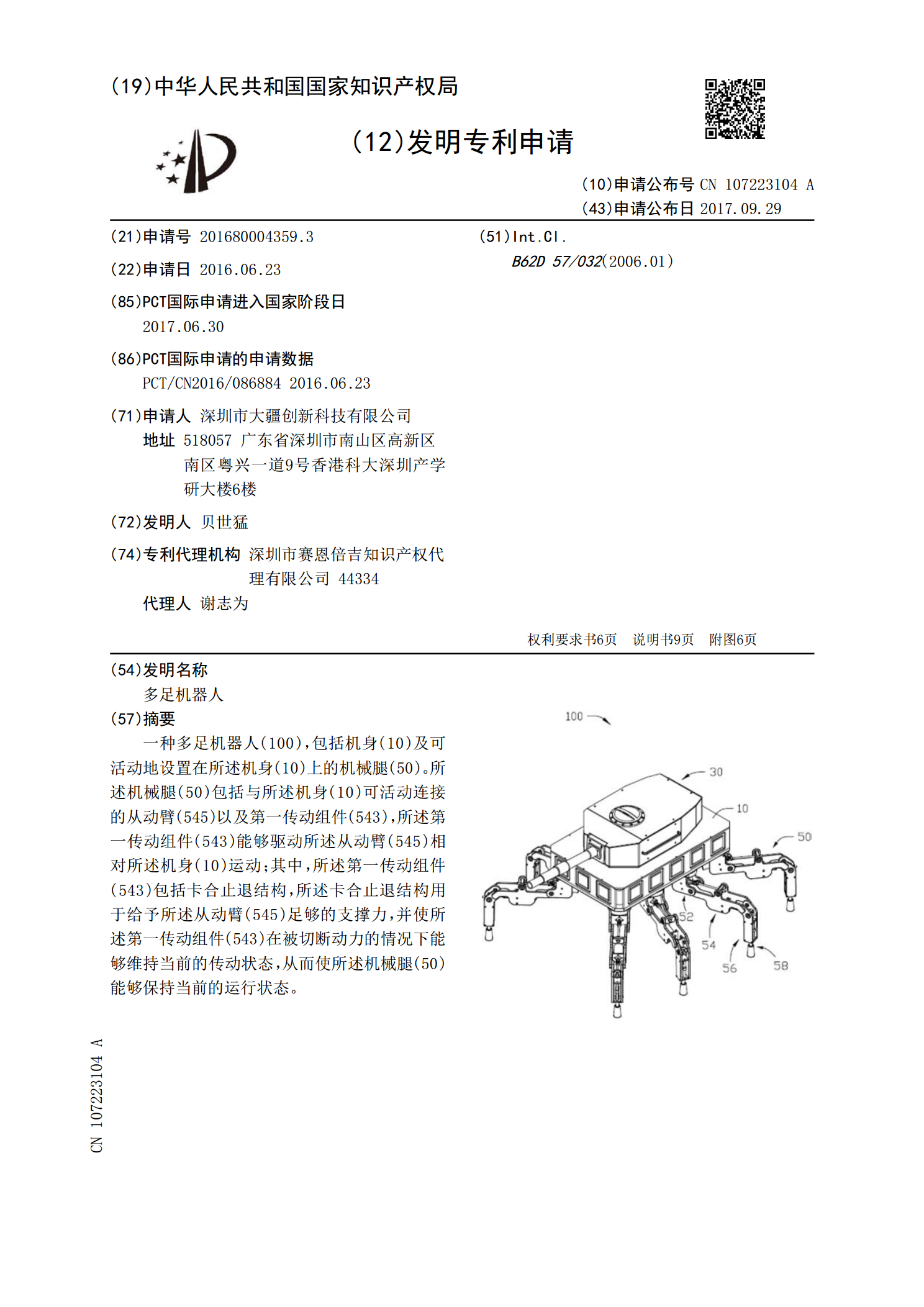
一种多足机器人(100),包括机身(10)及可活动地设置在所述机身(10)上的机械腿(50)。所述机械腿(50)包括与所述机身(10)可活动连接的从动臂(545)以及第一传动组件(543),所述第一传动组件(543)能够驱动所述从动臂(545)相对所述机身(10)运动;其中,所述第一传动组件(543)包括卡合止退结构,所述卡合止退结构用于给予所述从动臂(545)足够的支撑力,并使所述第一传动组件(543)在被切断动力的情况下能够维持当前的传动状态,从而使所述机械腿(50)能够保持当前的运行状态。