
一种擦窗机器人的行走控制方法和行走控制装置.pdf

增梅****主啊


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种擦窗机器人的行走控制方法和行走控制装置.pdf
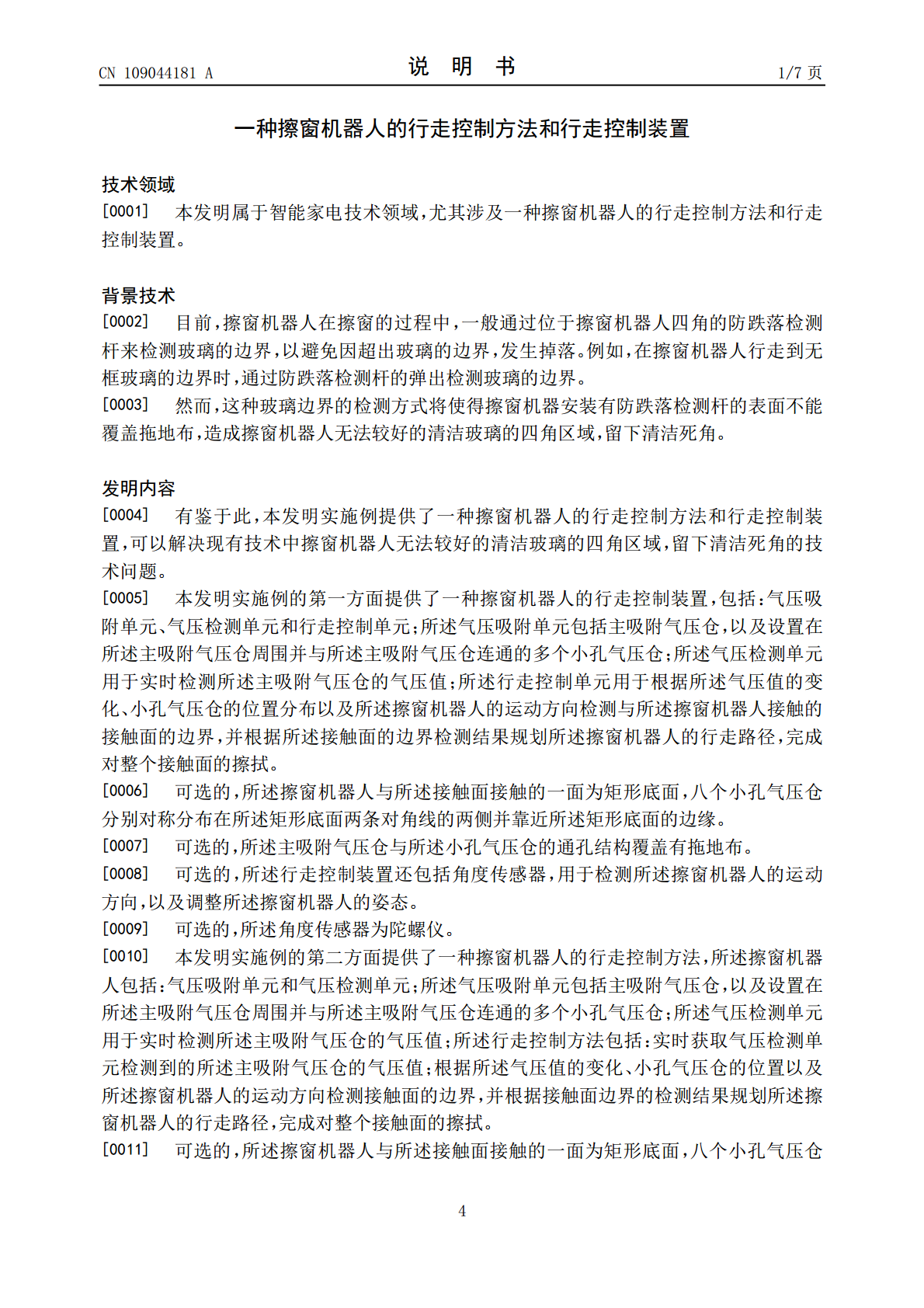
本发明适用于智能家电技术领域,提供了一种擦窗机器人的行走控制方法和行走控制装置,所述行走控制装置包括:气压吸附单元、气压检测单元和行走控制单元;所述气压吸附单元包括主吸附气压仓,以及设置在所述主吸附气压仓周围并与所述主吸附气压仓连通的多个小孔气压仓;所述行走控制单元用于根据所述主吸附气压仓的气压值的变化、小孔气压仓的位置分布以及所述擦窗机器人的运动方向检测与所述擦窗机器人接触的接触面的边界,并根据所述接触面的边界检测结果规划所述擦窗机器人的行走路径,完成对整个接触面的擦拭;不需要额外设置防跌落检测杆检测接

一种自行走装置的行走控制方法及自行走装置.pdf
一种自行走装置的行走控制方法及自行走装置。本发明在现有的自行走装置中增加简单的判断机制,通过统计所述自行走装置沿同一方向运行的时间t和距离I,在所述时间t达到时长阈值和/或所述距离I达到距离阈值时,控制所述自行走装置转向,避免自行走装置无效的朝同一方向运转,盲目的切割同一位置或同一方向的草坪。本发明能够在不增加传感设备,不增加硬件成本,不改变电路架构的同时,通过简单的控制,以最小的运算开销将现有自行走装置从错误的行走路径中纠正至正确的行走方向。
行走装置及带有该行走装置的擦玻璃机器人.pdf
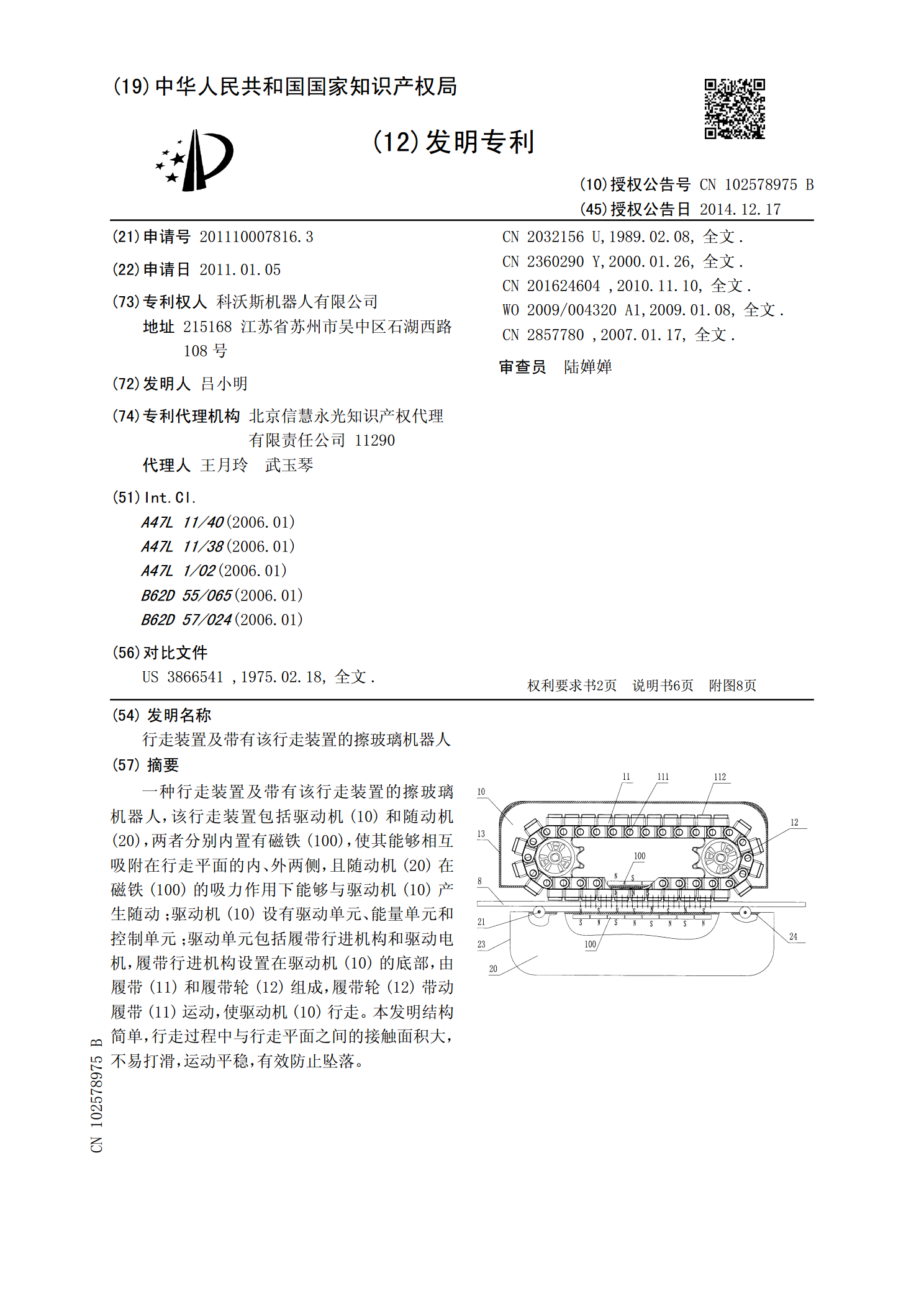
一种行走装置及带有该行走装置的擦玻璃机器人,该行走装置包括驱动机(10)和随动机(20),两者分别内置有磁铁(100),使其能够相互吸附在行走平面的内、外两侧,且随动机(20)在磁铁(100)的吸力作用下能够与驱动机(10)产生随动;驱动机(10)设有驱动单元、能量单元和控制单元;驱动单元包括履带行进机构和驱动电机,履带行进机构设置在驱动机(10)的底部,由履带(11)和履带轮(12)组成,履带轮(12)带动履带(11)运动,使驱动机(10)行走。本发明结构简单,行走过程中与行走平面之间的接触面积大,不易

一种机器人沿墙行走的控制方法及装置.pdf
本发明适用于机器控制的技术领域,提供了一种机器人沿墙行走的控制方法及装置,包括:获取所述机器人在机身竖直高度范围内距离障碍物的线阵距离数据或面阵距离数据;根据所述线阵距离数据或所述面阵距离数据,确定所述机器人的沿墙参数;根据所述机器人的沿墙参数控制所述机器人沿墙行走。本发明通过线阵距离数据或面阵距离数据控制所述机器人沿边沿墙,与传统的单点测距相比具有更高的测距准确性,对复杂环境适应性更强。

一种智能控制行走机器人装置.pdf
本发明公开了一种智能控制行走机器人装置,包括壳体,控制台、支撑驱动器、蓄电池、红外感应器,所述壳体下方设置有伺服驱动电机,所述伺服驱动电机下方设置有减震器,所述减震器下方设置有移动滑轮,所述壳体底部设置有所述蓄电池,所述蓄电池上方设置有所述控制台,所述壳体一侧设置有电子显示屏,所述电子显示屏下方设置有所述红外感应器,所述蓄电池两侧均设置有所述支撑驱动器,所述支撑驱动器下方设置有防撞块,所述壳体上方设置有旋转轴,所述无线传输器一侧设置有中央处理器,所述中央处理器一侧设置有语音控制器。本发明增加设备移动效率,