
一种自行走装置的行走控制方法及自行走装置.pdf

小寄****淑k


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自行走装置的行走控制方法及自行走装置.pdf
一种自行走装置的行走控制方法及自行走装置。本发明在现有的自行走装置中增加简单的判断机制,通过统计所述自行走装置沿同一方向运行的时间t和距离I,在所述时间t达到时长阈值和/或所述距离I达到距离阈值时,控制所述自行走装置转向,避免自行走装置无效的朝同一方向运转,盲目的切割同一位置或同一方向的草坪。本发明能够在不增加传感设备,不增加硬件成本,不改变电路架构的同时,通过简单的控制,以最小的运算开销将现有自行走装置从错误的行走路径中纠正至正确的行走方向。
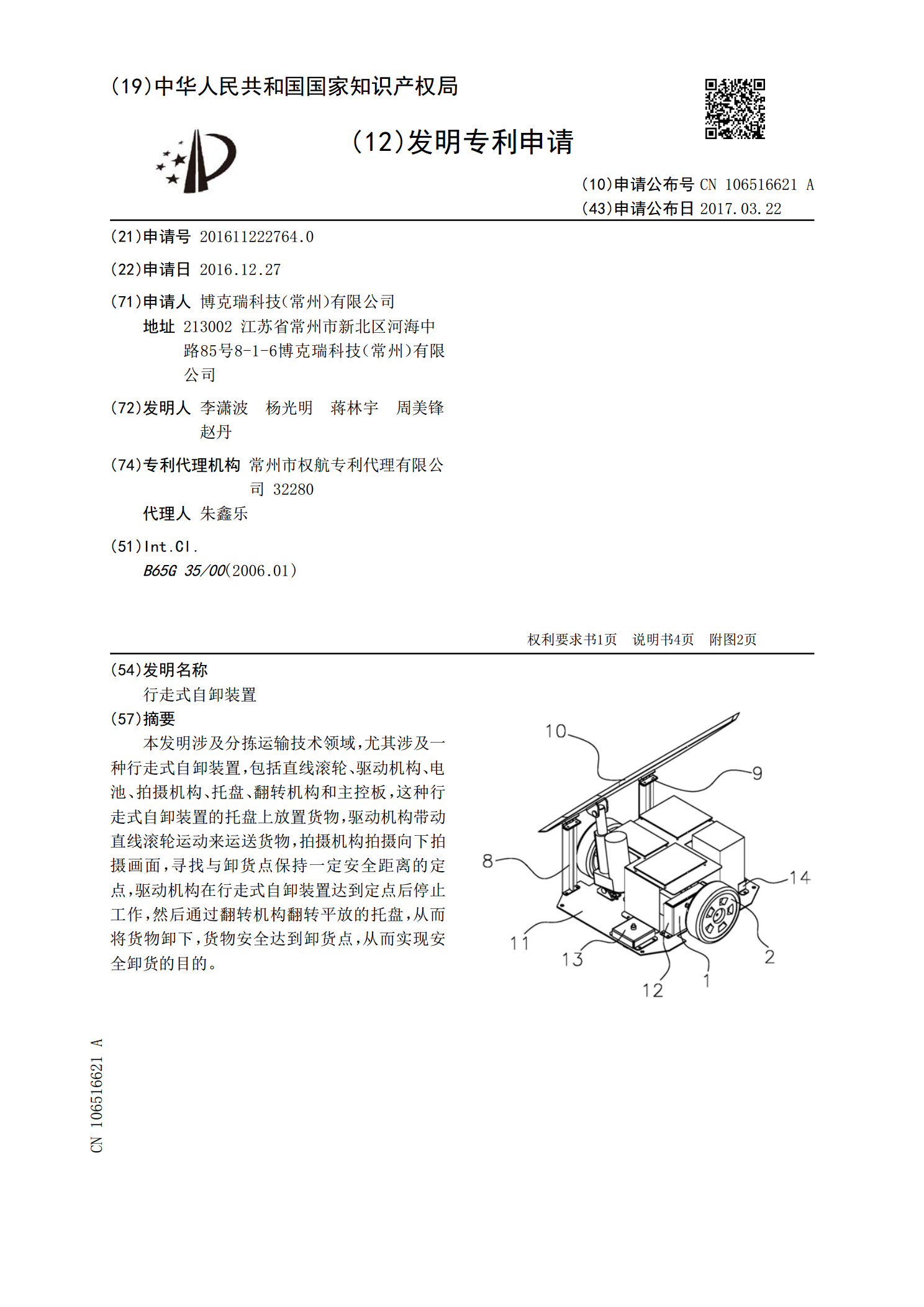
行走式自卸装置.pdf
本发明涉及分拣运输技术领域,尤其涉及一种行走式自卸装置,包括直线滚轮、驱动机构、电池、拍摄机构、托盘、翻转机构和主控板,这种行走式自卸装置的托盘上放置货物,驱动机构带动直线滚轮运动来运送货物,拍摄机构拍摄向下拍摄画面,寻找与卸货点保持一定安全距离的定点,驱动机构在行走式自卸装置达到定点后停止工作,然后通过翻转机构翻转平放的托盘,从而将货物卸下,货物安全达到卸货点,从而实现安全卸货的目的。
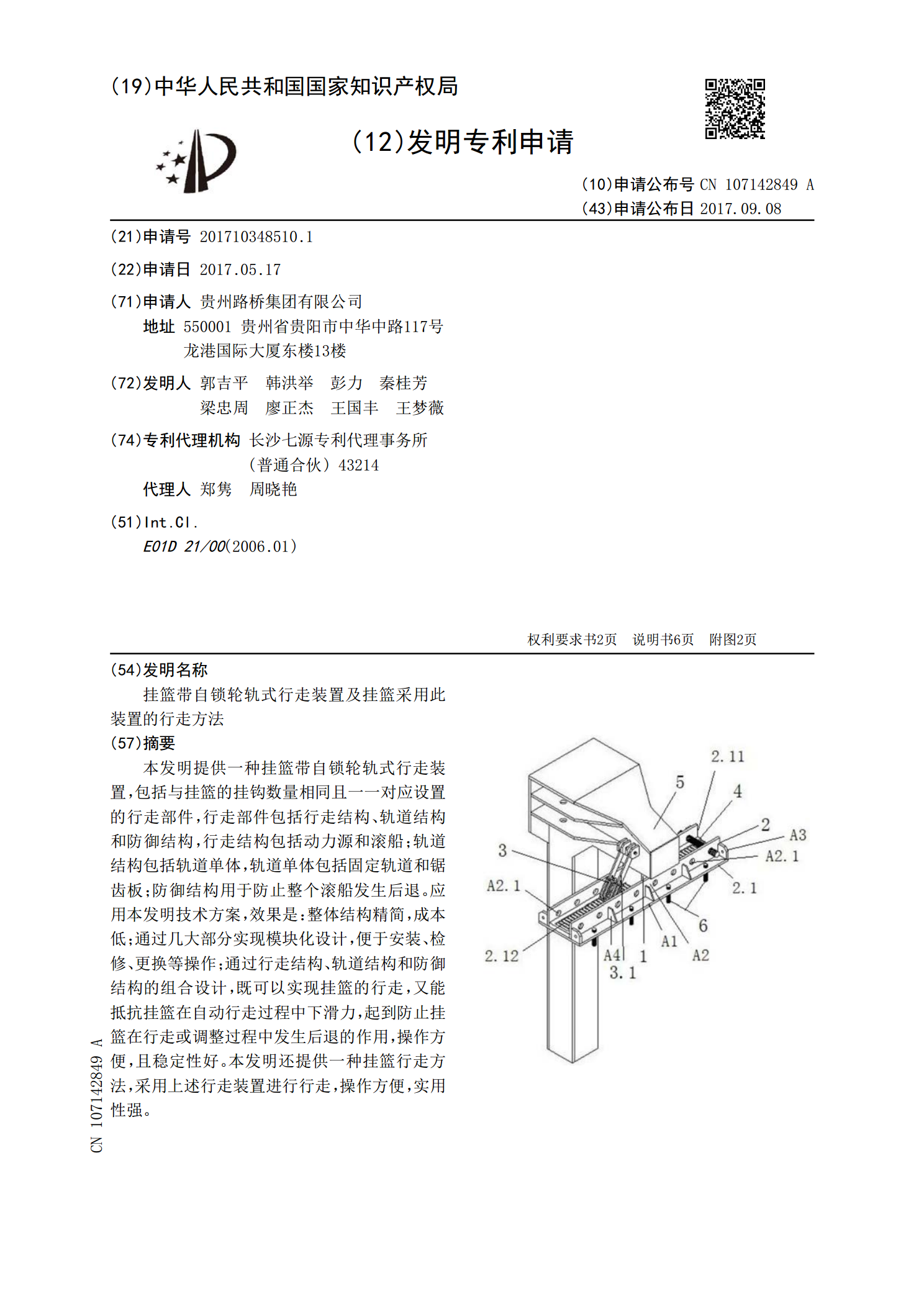
挂篮带自锁轮轨式行走装置及挂篮采用此装置的行走方法.pdf
本发明提供一种挂篮带自锁轮轨式行走装置,包括与挂篮的挂钩数量相同且一一对应设置的行走部件,行走部件包括行走结构、轨道结构和防御结构,行走结构包括动力源和滚船;轨道结构包括轨道单体,轨道单体包括固定轨道和锯齿板;防御结构用于防止整个滚船发生后退。应用本发明技术方案,效果是:整体结构精简,成本低;通过几大部分实现模块化设计,便于安装、检修、更换等操作;通过行走结构、轨道结构和防御结构的组合设计,既可以实现挂篮的行走,又能抵抗挂篮在自动行走过程中下滑力,起到防止挂篮在行走或调整过程中发生后退的作用,操作方便,且

行走装置、用于行走装置的行走系统及方法.pdf
本发明公开了一种行走装置、用于行走装置的行走系统及方法,属于运动装置技术领域,所示行走系统包括支腿,所述支腿包括连杆机构、用于驱动所述连杆机构伸缩的驱转装置;所述连杆机构上设置有轮架;还包括气缸;所述连接件上设置有转轴,气缸可绕所述转轴转动;所述连接件上的转轴与连杆机构上的转轴轴线平行;所述连接件上还设置有锁定件。所示行走装置基于所述行走系统,所述行走方法为所述行走装置的行走方法。采用本方案提供的技术方案,不仅能够对行走装置的承载能力和响应速度上进行优化,同时结构简单,能够良好的适应颠簸路况。

一种自平衡行走装置及平衡车.pdf
本发明涉及带电水冲洗设备技术领域,具体而言,涉及一种自平衡行走装置及平衡车。本发明提供的自平衡行走装置,包括行走机构以及平衡机构。在使用过程中,设置于行走支架两侧的行走件可实现带动支撑架行走,同时可通过改变两侧行走件的行走速度,使之产生差异,进而实现转弯、掉头等动作,可灵活运转。设置平衡推杆,可根据用户的需求,调整平衡推杆的伸出长度,进而调整支撑架使之水平,进而避免倾斜,保证冲洗设备在冲洗过程中的稳定性。本发明提供的平衡车,包括上述的自平衡行走装置,因此也具有上述的有益效果。