
一种机器人清扫地面的方法、装置及机器人.pdf

一条****ee

1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人清扫地面的方法、装置及机器人.pdf
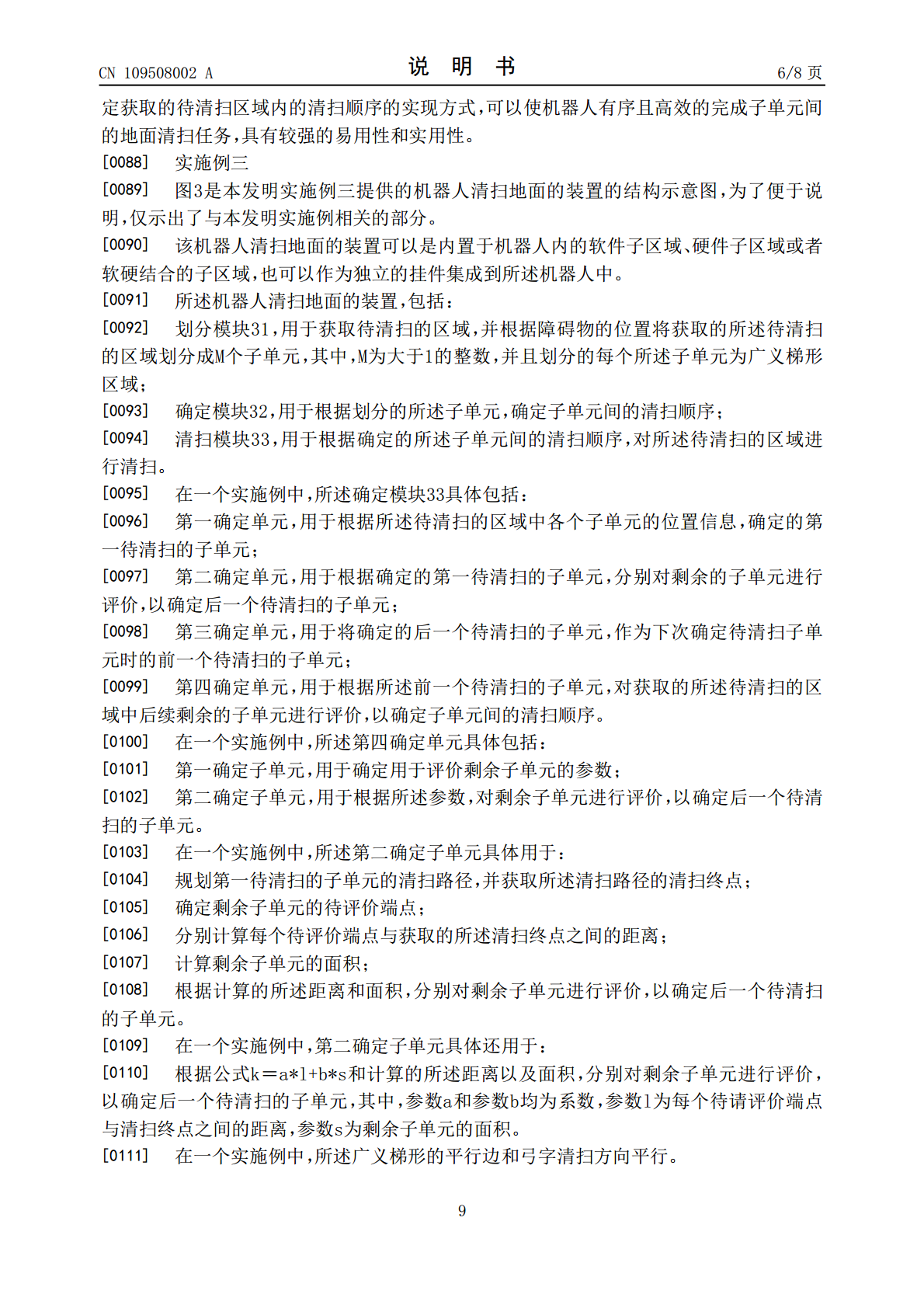
本发明适用于机器人技术领域,提供了一种机器人清扫地面的方法、装置及机器人,其中,该机器人清扫地面的方法包括获取待清扫的区域,并根据障碍物位置将获取的所述待清扫的区域划分成M个子单元,根据划分的所述子单元,确定子单元间的清扫顺序,根据确定的所述子单元间的清扫顺序,对所述待清扫的区域进行清扫。本发明可以根据子单元间的清扫顺序,对待清扫的区域进行清扫,从而使机器人有序且高效的完成清扫地面的任务。

一种清洁地面的方法、扫地机器人及拖地机器人.pdf
本发明适用于智能家居技术领域,提供了一种清洁地面的方法、扫地机器人及拖地机器人,其中,该清洁地面的方法包括扫地机器人将构建的环境地图和当前已清扫的区域信息发送至服务器,所述服务器将环境地图和当前已清扫的区域信息发送至拖地机器人,所述拖地机器人获取自身的位姿信息,所述拖地机器人根据所述自身的位姿信息、环境地图和当前已清扫的区域信息,对所述已清扫的区域进行拖地清洁。本发明通过服务器可以将扫地机器人构建的环境地图和当前已清扫的区域信息共享至拖地机器人,从而使整个清洁地面的任务能够按照先扫后拖的模式有序地进行着,

一种清扫机器人的扫地装置.pdf
本发明公开了一种清扫机器人的扫地装置,包括机身,机身前面两侧分别安装有主动前轮,机身后面两侧分别安装有从动后轮,两个主动前轮之间通过旋转轴连接,旋转轴外面套接有滚刷,从动后轮内侧均设置有第一齿轮,第一齿轮与从动后轮之间均通过固定杆固定连接,且第一齿轮通过啮合连接有第二齿轮,第二齿轮均位于从动后轮和主动前轮之间且水平放置,第二齿轮底面中心均连接有毛刷杆,毛刷杆底端连接有毛刷,机身的上半部分设置有集尘箱,集尘箱底部设置有第一吸尘口和第二吸尘口,第一吸尘口位于滚刷的正上方,第二吸尘口位于从动后轮后方的机身底面上
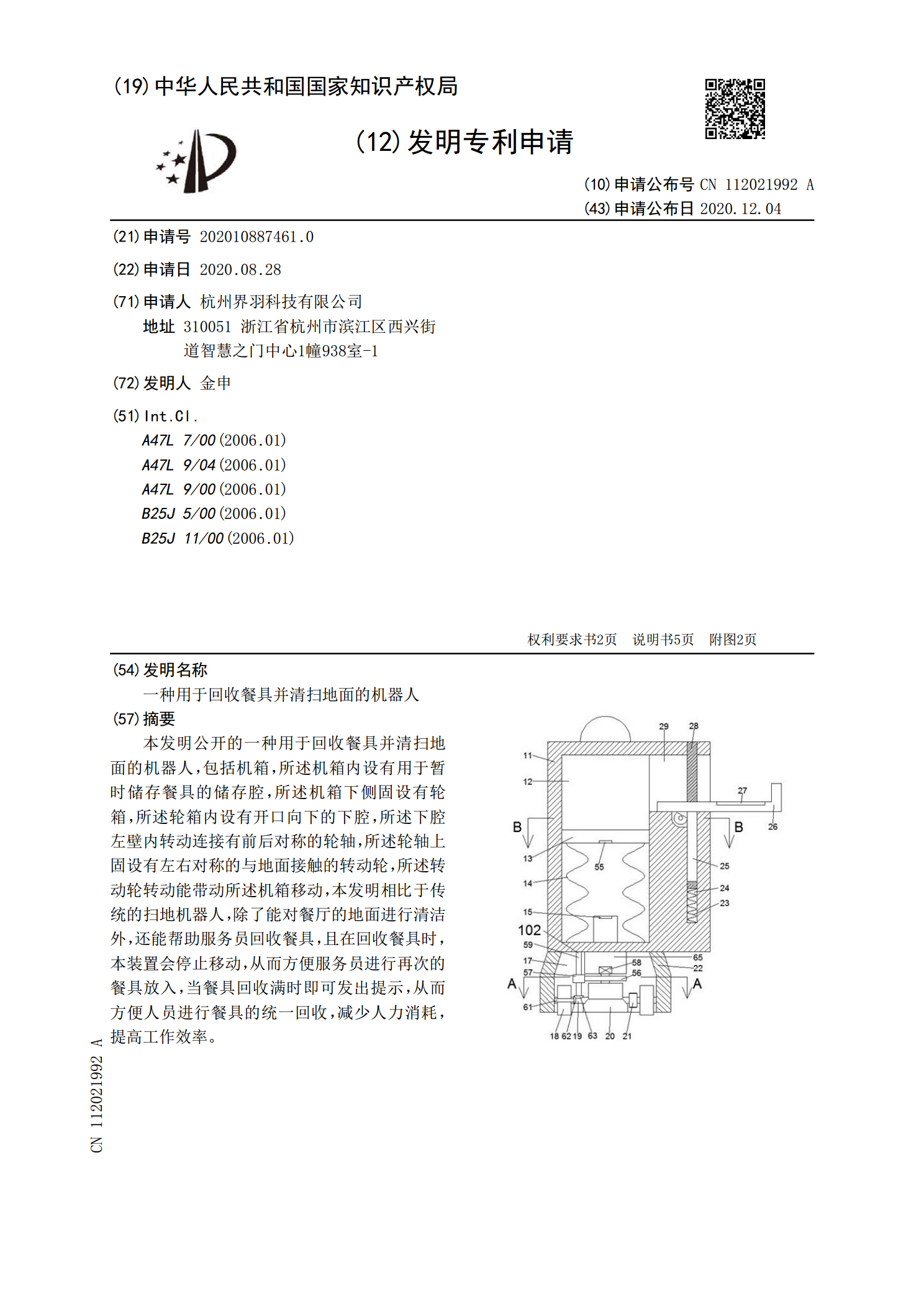
一种用于回收餐具并清扫地面的机器人.pdf
本发明公开的一种用于回收餐具并清扫地面的机器人,包括机箱,所述机箱内设有用于暂时储存餐具的储存腔,所述机箱下侧固设有轮箱,所述轮箱内设有开口向下的下腔,所述下腔左壁内转动连接有前后对称的轮轴,所述轮轴上固设有左右对称的与地面接触的转动轮,所述转动轮转动能带动所述机箱移动,本发明相比于传统的扫地机器人,除了能对餐厅的地面进行清洁外,还能帮助服务员回收餐具,且在回收餐具时,本装置会停止移动,从而方便服务员进行再次的餐具放入,当餐具回收满时即可发出提示,从而方便人员进行餐具的统一回收,减少人力消耗,提高工作效率

一种扫地机器人的清扫装置.pdf
本实用新型公开了一种扫地机器人及其清扫装置,清扫装置包括:壳体,滚刷件,和吸尘机构;所述壳体包括:一体成型的安装壳体部和集尘壳体部,所述安装壳体部的内部具有安装腔,所述集尘壳体部的内部具有集尘腔,所述安装腔与集尘腔相互连通,所述滚刷件可转动的安装在所述安装腔中,所述安装壳体部的底部还开设有用于供所述滚刷件的刷体外露的外露口,所述集尘壳体部的壳壁上还开设有连通于所述集尘腔的出尘口,所述出尘口与所述吸尘机构连通。通过一体成型的安装壳体部和集尘壳体部,使得相互连通的安装腔与集尘腔集成在壳体中的方式,有效简化壳体