
一种车辆开门碰撞预警装置和方法.pdf

一吃****春晓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆开门碰撞预警装置和方法.pdf
本发明的实施例提供一种车辆开门碰撞预警装置和方法,涉及车载设备技术领域,用于增加车辆开门碰撞的预警装置的检测距离,从而减小或避免停车开门时造成的碰撞事故。该装置包括:摄像头,用于拍摄车辆的后方获取第一图像以及在第一预设时间长度后拍摄车辆的后方获取第二图像;处理器,用于获取同一物体在第一图像中的第一像素坐标和在第二图像中的第二像素坐标,根据预设公式分别将第一像素坐标和第二像素坐标转换为第一实际坐标和第二实际坐标,根据第一实际坐标和第二实际坐标计算各物体的移动速度和移动方向,以及在确定任一物体将在第二预设时间
车辆碰撞预警方法、装置和车辆.pdf
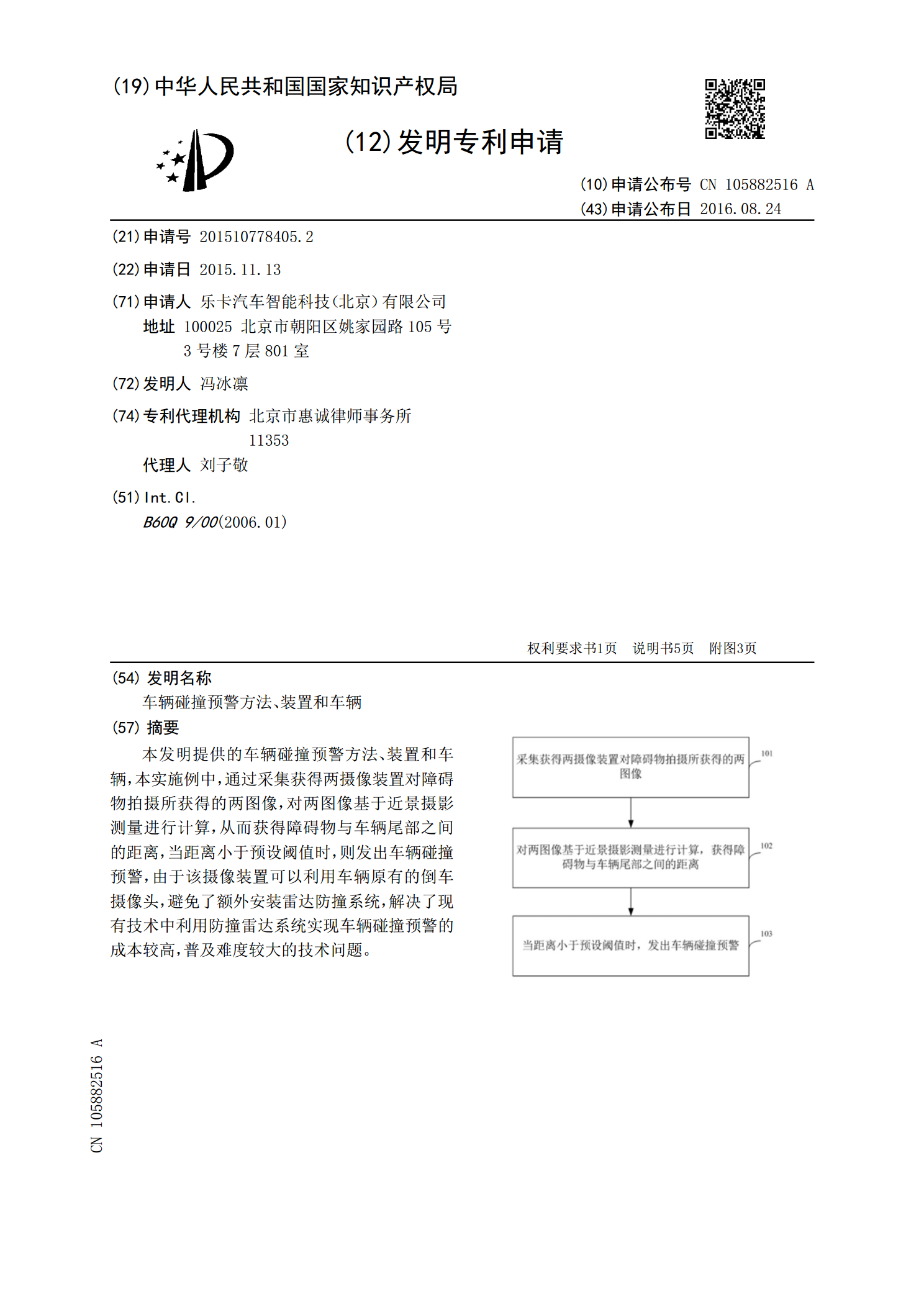
本发明提供的车辆碰撞预警方法、装置和车辆,本实施例中,通过采集获得两摄像装置对障碍物拍摄所获得的两图像,对两图像基于近景摄影测量进行计算,从而获得障碍物与车辆尾部之间的距离,当距离小于预设阈值时,则发出车辆碰撞预警,由于该摄像装置可以利用车辆原有的倒车摄像头,避免了额外安装雷达防撞系统,解决了现有技术中利用防撞雷达系统实现车辆碰撞预警的成本较高,普及难度较大的技术问题。
一种车辆碰撞预警方法、装置、设备和存储介质.pdf
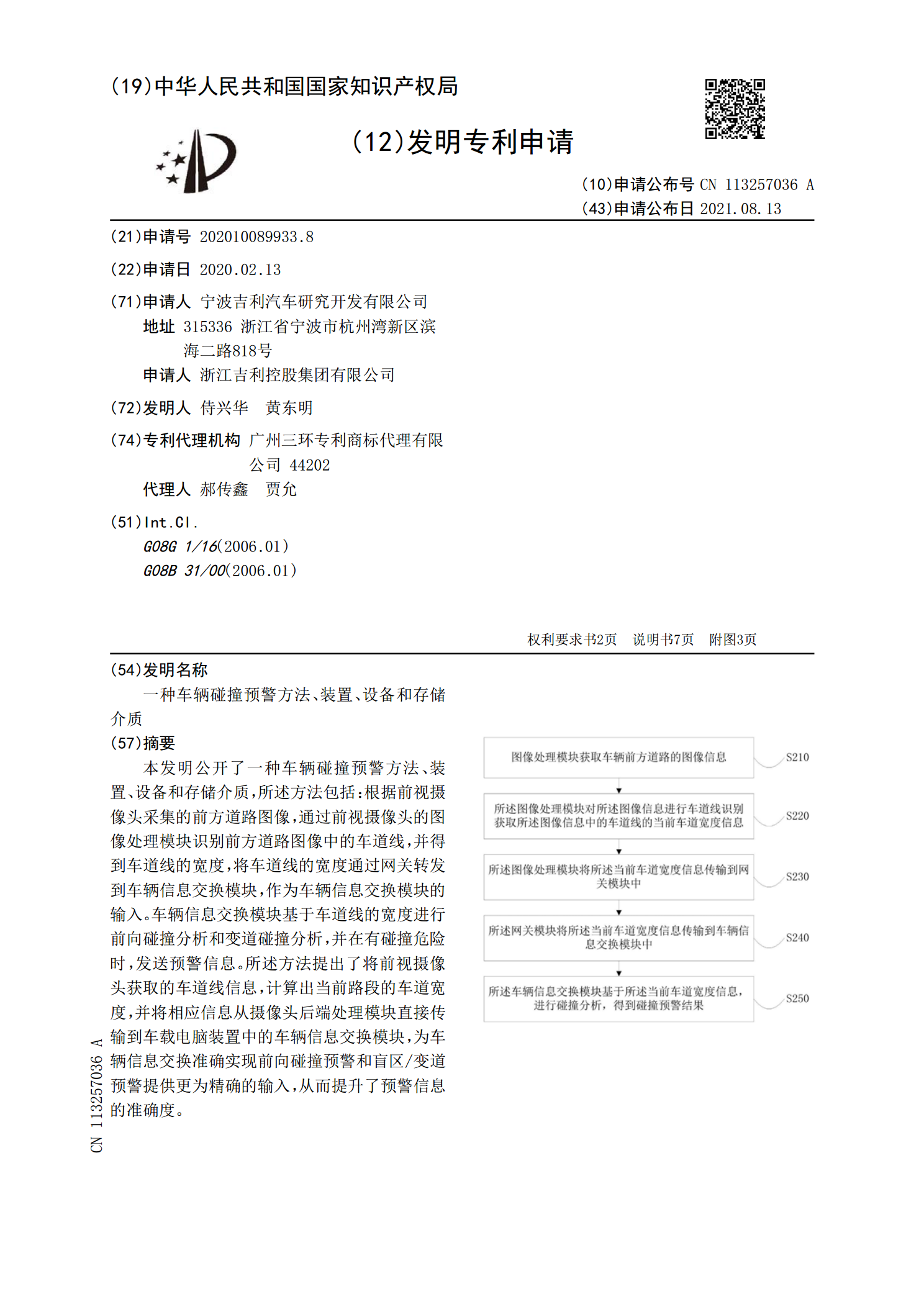
本发明公开了一种车辆碰撞预警方法、装置、设备和存储介质,所述方法包括:根据前视摄像头采集的前方道路图像,通过前视摄像头的图像处理模块识别前方道路图像中的车道线,并得到车道线的宽度,将车道线的宽度通过网关转发到车辆信息交换模块,作为车辆信息交换模块的输入。车辆信息交换模块基于车道线的宽度进行前向碰撞分析和变道碰撞分析,并在有碰撞危险时,发送预警信息。所述方法提出了将前视摄像头获取的车道线信息,计算出当前路段的车道宽度,并将相应信息从摄像头后端处理模块直接传输到车载电脑装置中的车辆信息交换模块,为车辆信息交换

一种基于环视图像的车辆开门碰撞预警方法.docx
一种基于环视图像的车辆开门碰撞预警方法摘要:车辆开门碰撞是一种常见的道路交通事故,尤其在道路较为繁忙的城市里容易发生。本文针对这一问题,提出了一种基于环视图像的车辆开门碰撞预警方法,通过对车辆周围环境的监测,来及时发现可能发生碰撞的情况,从而避免车辆开门碰撞事故的发生。关键词:车辆开门碰撞;环视图像;预警方法;交通安全一、引言车辆开门碰撞是一种常见的交通事故。尤其在城市里,道路较为繁忙的地方,由于道路宽度较窄,车辆经常需要停车等候,有时司机会迫不及待地开门下车,这时候如果没有及时掌握周围环境,车门很容易撞

一种车辆前向碰撞预警方法及装置.pdf
本发明提供一种车辆前向碰撞预警方法,用于主车在道路行驶过程中通过C‑V2X技术对同车道和/或相邻车道的前向远车进行前碰预警监测,包括:主车根据路侧单元的V2I信息、同车道和/或提供转向信号的相邻车道前向远车的V2V信息,检测同车道和/或提供转向信号的相邻车道前向远车的碰撞风险;若存在碰撞风险则算出碰撞时间并筛选最小的碰撞时间;获得当前道路行驶工况及对应的前向碰撞概率与碰撞时间关联曲线,并根据最小碰撞时间,在关联曲线中查找前向碰撞概率,待判定前向碰撞概率大于等于相应预设阈值后,向主车驾驶员发出前向碰撞预警。