
一种基于ROS的家庭服务机器人.pdf

是秋****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于ROS的家庭服务机器人.pdf
本发明公开了一种基于ROS的家庭服务机器人,该机器人包括清洁移动平台,躯干,三自由度双臂和二自由度头部,清洁移动平台上装有操作系统为ROS的Linux主机、激光雷达、惯性测量单元、行走组件和清洁组件,二自由度头部包括显示屏、深度相机、麦克风模块和触觉传感器。该机器人通过激光雷达对未知环境构建三维地图,利用ROS的轨迹规划库,在环境中按照要求进行清洁轨迹规划与优化,躲避动、静态障碍;通过头部的显示屏、深度相机和麦克风模块进行人机交互,深度相机获取人的肢体动作信息,头部的触觉传感器能感知是否有人触碰,三自由度

基于ROS的家庭服务机器人设计.pptx
基于ROS的家庭服务机器人设计目录机器人总体设计硬件架构软件架构通信协议电源系统ROS与机器人ROS介绍ROS在机器人领域的应用ROS与家庭服务机器人的结合ROS在机器人设计中的优势家庭服务机器人功能实现语音识别与处理图像识别与处理导航与定位家庭自动化控制机器人硬件选型与集成传感器选型执行器选型控制器选型集成测试与验证机器人软件实现与调试软件开发环境搭建算法设计与实现程序调试与优化实时操作系统应用机器人应用场景与未来发展家庭服务机器人应用场景机器人技术发展趋势ROS在机器人领域的发展前景基于ROS的家庭服
基于ROS的智能餐厅服务机器人的研究.pptx
添加副标题目录PART01PART02ROS的起源和功能ROS在机器人领域的应用ROS的架构和通信机制PART03智能餐厅服务机器人的定义和功能智能餐厅服务机器人的发展现状智能餐厅服务机器人的关键技术PART04机器人硬件平台的选择与搭建ROS系统的配置与移植机器人的感知系统设计机器人的控制系统设计机器人的执行系统设计PART05实验环境的搭建感知系统的实验与测试控制系统的实验与测试执行系统的实验与测试整体性能评估与优化PART06在智能餐厅中的应用前景在其他领域的应用前景面临的挑战与问题未来发展方向与趋
一种基于ROS的服务机器人及其室内导航方法.pdf
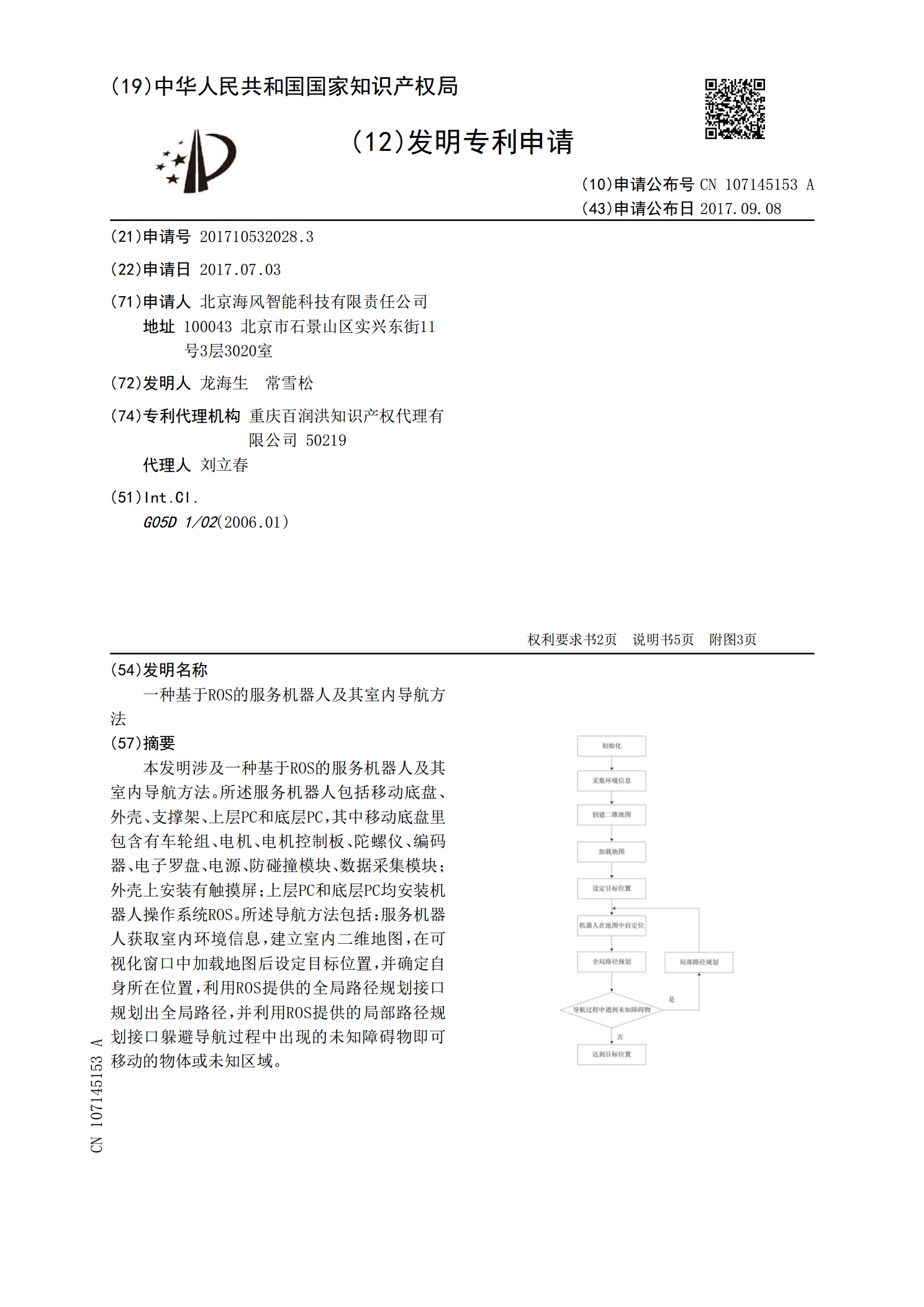
本发明涉及一种基于ROS的服务机器人及其室内导航方法。所述服务机器人包括移动底盘、外壳、支撑架、上层PC和底层PC,其中移动底盘里包含有车轮组、电机、电机控制板、陀螺仪、编码器、电子罗盘、电源、防碰撞模块、数据采集模块;外壳上安装有触摸屏;上层PC和底层PC均安装机器人操作系统ROS。所述导航方法包括:服务机器人获取室内环境信息,建立室内二维地图,在可视化窗口中加载地图后设定目标位置,并确定自身所在位置,利用ROS提供的全局路径规划接口规划出全局路径,并利用ROS提供的局部路径规划接口躲避导航过程中出现的
一种基于ROS的服务机器人及其语音交互导航方法.pdf
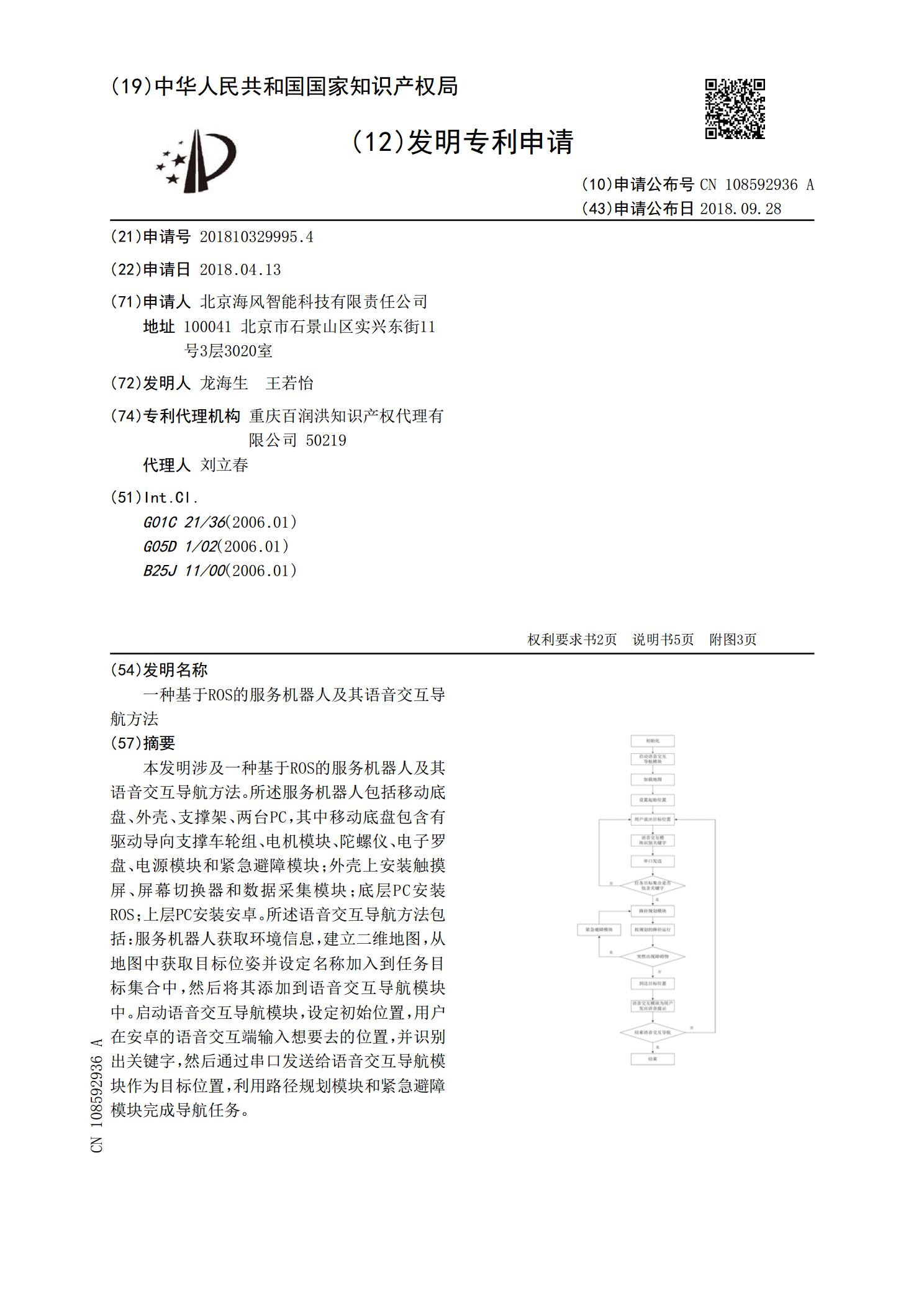
本发明涉及一种基于ROS的服务机器人及其语音交互导航方法。所述服务机器人包括移动底盘、外壳、支撑架、两台PC,其中移动底盘包含有驱动导向支撑车轮组、电机模块、陀螺仪、电子罗盘、电源模块和紧急避障模块;外壳上安装触摸屏、屏幕切换器和数据采集模块;底层PC安装ROS;上层PC安装安卓。所述语音交互导航方法包括:服务机器人获取环境信息,建立二维地图,从地图中获取目标位姿并设定名称加入到任务目标集合中,然后将其添加到语音交互导航模块中。启动语音交互导航模块,设定初始位置,用户在安卓的语音交互端输入想要去的位置,并